Calibration Board
Calibration board is usually used for intrinsic parameter check and hand-eye calibration. This chapter introduces the types, models, and mounting methods of calibration boards.
Calibration Board Types and Models
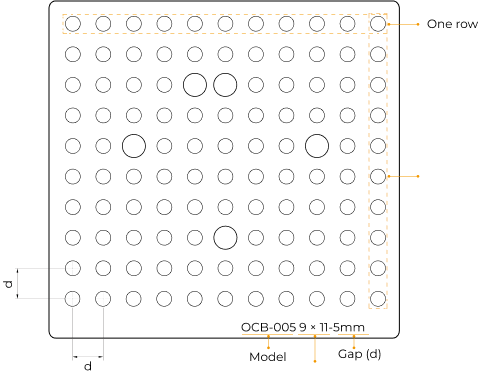
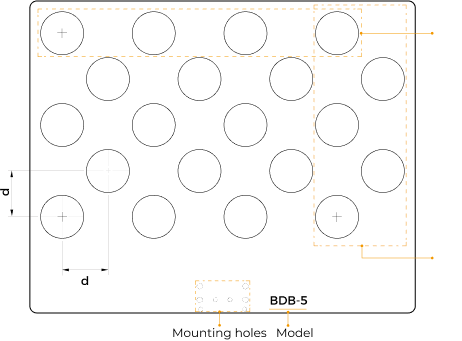
Mech-Mind provides three types of calibration boards: BDB, CGB and OCB.
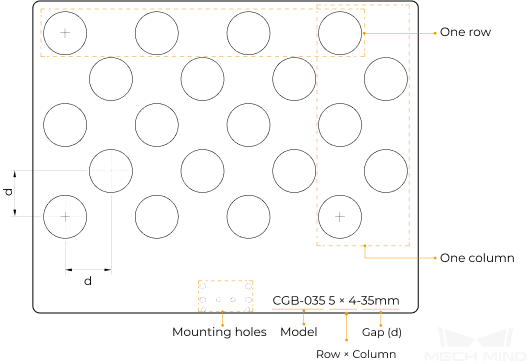
CGB
For V4 cameras.
| Model | Functional Diagrams | d (mm) | Row | Column |
|---|---|---|---|---|
CGB-020 |
|
20 |
5 |
4 |
CGB-035 |
35 |
5 |
4 |
|
CGB-050 |
50 |
5 |
4 |
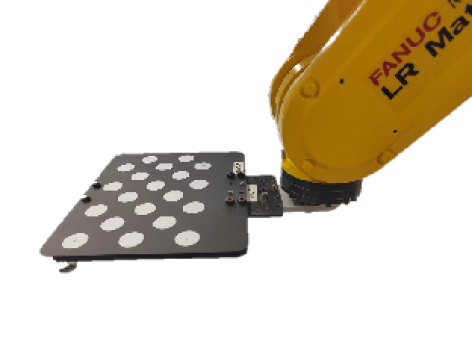
Mounting Method
In the following calibration scenarios, you can mount the calibration board on the last joint of the robot.
-
Automatic Calibration in the Eye to Hand (ETH) Scenario
-
Manual Calibration in the ETH Scenario (Multiple Random Calibration Board Poses)
| For other calibration scenarios and intrinsic parameter checks, there is no need to mount the calibration board. Please place the calibration board in the center of the object plane. |
Common ways to mount the calibration board are shown below:
| Direct mounting | Mounting through the flange adapter |
|---|---|
|
|