位置姿勢編集ウィジェット
モデルファイルリストから1つの把持位置姿勢/幾何学的中心点を選択した後、CADファイルリストの下部にある機能エリアで位置姿勢を編集できます。
-
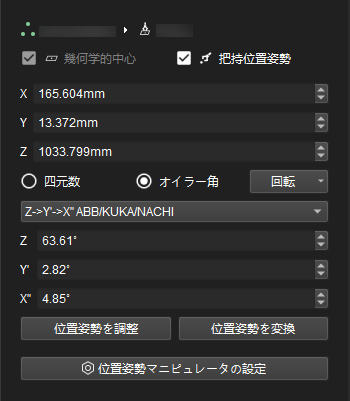
幾何学的中心にチェックを入れると、この点は幾何学的中心点として設定されます。
-
把持位置姿勢にチェックを入れると、この点は把持位置姿勢として設定されます。
点群モデルには唯一の幾何学的中心点が必要ですが、1つまたは複数の把持位置姿勢を設定できます。把持位置姿勢を1つだけ設定する場合は、幾何学的中心点と把持位置姿勢が同じ点である必要があります。
-
位置調整:現在の点の座標を変更して、その位置を調整します。値は直接入力することも、右側の矢印で調整することもできます。
-
姿勢調整:位置姿勢を四元数またはオイラー角として表示するように選択できます。値は直接入力することも、右側の矢印で調整することもできます。
-
回転をクリックして、ドロップダウンメニューのオプションから位置姿勢をすばやく調整できます。
-
Z→Y’→X” ABB/KUKA/NACHIをクリックして、オイラー角の回転順序を変更できます。
使用するロボットに合ったオイラー角回転順序を選択してください。
-
-
位置姿勢を調整をクリックして、位置姿勢のデータを調整できます。
-
をクリックして、選択した基準座標系に対して位置姿勢を調整できます。
-
位置姿勢マニピュレータの設定をクリックして、位置姿勢のマニピュレータ表示を調整できます。