位置姿勢を追加して把持位置姿勢を追加
把持位置姿勢は、ロボットが把持できる対象物上の位置を表します。 この位置姿勢は対象物の座標系にあり、その位置と方向は対象物に基づいています。 ロボットが把持するために、Mech-Visionからの把持位置姿勢(把持時のロボットのツール位置姿勢)が必要です。この位置姿勢は、対象物の把持位置姿勢から変換されたものです。 したがって、点群モデルに把持位置姿勢を追加してから、Mech-Visionがマッチング処理により対象物の把持位置姿勢を生成し、実際の把持位置姿勢を出力することができます。
|
最初に追加した把持位置姿勢は、デフォルトで幾何学的中心点に設定されます。以下は、幾何学的中心点についての説明です。
|
-
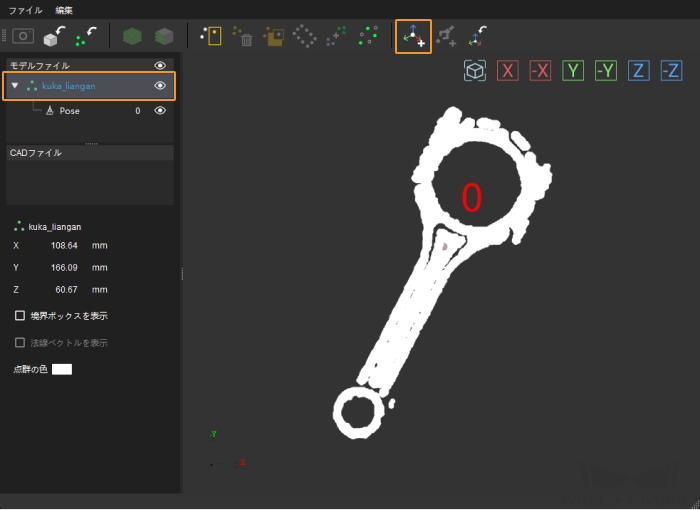
モデルファイルリストで、把持位置姿勢を追加する点群モデルを選択し、ツールバーの
 クリックして位置姿勢を追加できます。追加した位置姿勢は、把持位置姿勢のものです。
クリックして位置姿勢を追加できます。追加した位置姿勢は、把持位置姿勢のものです。
|
|
-
モデルファイルリストでこの把持位置姿勢を選択して調整できます。把持位置姿勢を調整するには、次の2つの方法があります。
-
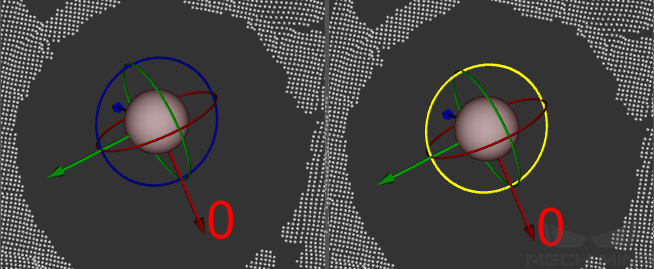
把持位置姿勢のマニピュレータをドラッグすることで調整:
Ctrlキーを押しながら、マニピュレータをクリックして選択し、ドラッグしてこのマニピュレータの方向に沿って把持位置姿勢を調整できます。クリックすると、マニピュレータの色が黄色に変わり、マニピュレータが選択されていることを示します。下図では、左側が選択前、右側が選択後の状態となります。
-
位置姿勢データを編集することで調整:
CADファイルリストの下部にあるエリアで位置姿勢を編集できます。詳細については、 位置姿勢編集ウィジェット をご参照ください。
-
-
設定後、 (またはショートカットCtrl+Sを押す)をクリックすれば、点群モデルと把持位置姿勢はプロジェクトフォルダ/resource/3d_matchingのパスに保存されます。
-
xxx.plyは、モデル点群ファイルです
-
geo_center.jsonは、モデルの幾何学的中心点位置姿勢ファイルです
-
pick_points.jsonは、把持位置姿勢ファイルです
-
pick_points_labels.jsonは、把持位置姿勢のラベルファイルです
-
|
ツールウィンドウを閉じると、ファイルが保存されているかどうかに関係なく、保存するかどうかを確認するポップアップ ウィンドウが表示されます。 |