位置姿勢の方向を調整(定義済みモード)
以下では、定義済みモードで位置姿勢の方向を調整する方法について説明します。
定義済みモードでは、位置姿勢方向の調整項目には 自動合わせ 、 基準位置姿勢を指す 、 パレット中心を指す/パレット中心の反対側を指す(デパレタイジング) が含まれます。
自動合わせ
使用方法
自動合わせ 機能は、 Z軸方向合わせ(部品供給) と 段ボール箱のパレタイジング・デパレタイジング に適用可能で、実際の状況に応じて選択することができます。
段ボール箱のパレタイジング・デパレタイジング を選択した場合、「位置姿勢を一括調整(V2)」ステップに新たな入力ポートが追加されます。また、 正方形サイズの判定しきい値 を設定する必要があります。設定手順は以下の通りです。
-
段ボール箱の寸法を入力します。
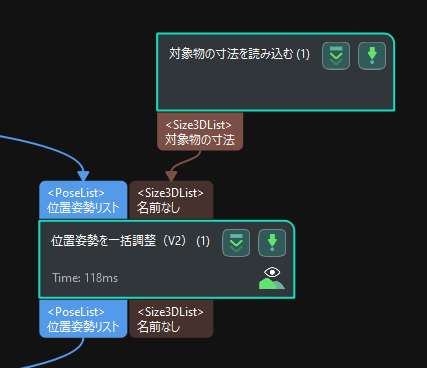
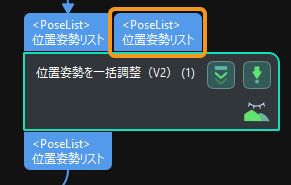
下図に示すように、「対象物の寸法を読み込む」ステップを例にして、このステップを「位置姿勢を一括調整(V2)」ステップにつなぎます。
-
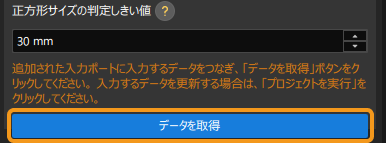
正方形サイズの判定しきい値 を設定します。
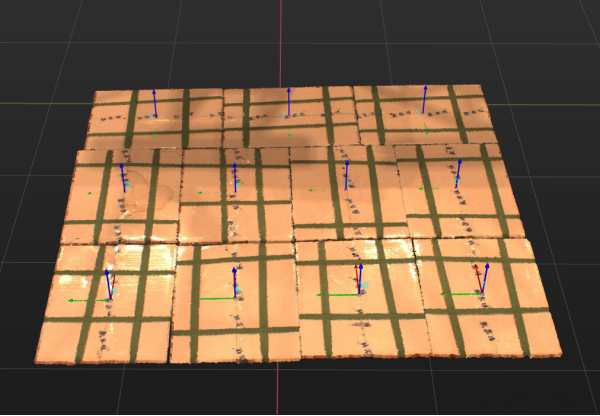
デパレタイジング中、このパラメータは段ボール箱の表面が正方形であるかどうかを判断するために使用されます。入力された段ボール箱の長さと幅の差がこのしきい値より小さい場合、段ボール箱の表面は正方形とみなされます。
-
入力データを取得します。
データを取得 をクリックし、位置姿勢と寸法データを取得します。
基準位置姿勢を指す
使用方法
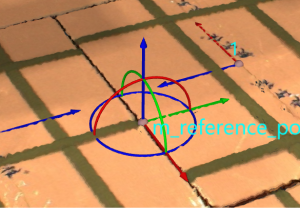
基準位置姿勢を設定
マニピュレータによる設定 と 外部ステップによる入力 の2つの設定方法に対応します。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
パレット中心を指す/パレット中心の反対側を指す(デパレタイジング)
機能
通常はデパレタイジングに使用され、特に箱の表面の特定の向きが必要な場合に使用されます。例えば、ラベルが貼られた箱の表面は上向きにする必要がある場合などです。この調整項目は、箱の位置姿勢をZ軸を中心に180°回転させ、箱の位置姿勢のある軸をパレット中心を指すか、またはパレット中心の反対側を指すようにします。
使用方法
パレット中心を設定
マニピュレータによる設定 と 外部ステップによる入力 の2つの設定方法に対応します。詳細は下表の通りです。
番号 |
パレット中心の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することでパレット中心を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップからパレット中心を入力します。 |
|
|