Sort Poses by Predefined Options
This section introduces how to sort poses with the provided pose sorting options.
You can select one of the six pose sorting types in the drop-down list.
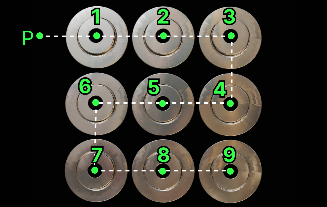
Sort by S shape on plane
Function
Sort the poses in rows and columns based on the given reference pose (with priority given to sorting poses according to “Row Direction”). This type is usually used for unloading neatly arranged workpieces or depalletizing.
Usage Instructions
Reference pose
There are two methods to set the reference pose, namely, Drag with pose manipulator and Input from external Step, as explained in the table below.
No. |
Method |
Description |
Instruction |
Illustration |
1 |
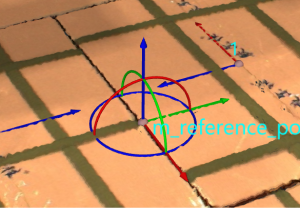
Drag with pose manipulator |
Adjust the position and orientation of the manipulator to set the reference pose. |
|
|
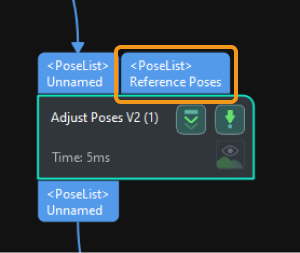
2 |
Input from external Step |
Input a reference pose from other Steps. |
|
|
Row direction
This parameter is used to specify the row direction when the poses are sorted by S shape on plane.
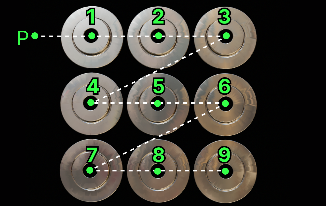
Sort by Z shape on plane
Function
Sort the poses in rows and columns based on the given reference pose (with priority given to sorting poses according to “Row Direction”). This type is usually used for unloading neatly arranged workpieces or depalletizing.
Usage Instructions
Reference pose
There are two methods to set the reference pose, namely, Drag with pose manipulator and Input from external Step, as explained in the table below.
No. |
Method |
Description |
Instruction |
Illustration |
1 |
Drag with pose manipulator |
Adjust the position and orientation of the manipulator to set the reference pose. |
|
|
2 |
Input from external Step |
Input a reference pose from other Steps. |
|
|
Row direction
This parameter is used to specify the row direction when the poses are sorted by Z shape on plane.
Sort by X/Y/Z value of pose
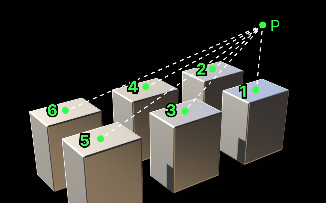
Sort by distance from pose to reference pose
Function
This sorting type calculates distances from all poses to be sorted to the reference pose and sort the poses according to the distance.
Usage Instructions
Reference pose
There are two methods to set the reference pose, namely, Drag with pose manipulator and Input from external Step, as explained in the table below.
No. |
Method |
Description |
Instruction |
Illustration |
1 |
Drag with pose manipulator |
Adjust the position and orientation of the manipulator to set the reference pose. |
|
|
2 |
Input from external Step |
Input a reference pose from other Steps. |
|
|
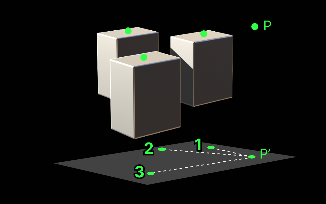
Sort by distance from pose to reference pose on XOY plane
Function
Project poses to be sorted and the specified reference pose onto the XOY plane, calculate the distances from poses to the reference pose on the plane, and then sort the poses according to the distance.
Usage Instructions
Reference pose
There are two methods to set the reference pose, namely, Drag with pose manipulator and Input from external Step, as explained in the table below.
No. |
Method |
Description |
Instruction |
Illustration |
1 |
Drag with pose manipulator |
Adjust the position and orientation of the manipulator to set the reference pose. |
|
|
2 |
Input from external Step |
Input a reference pose from other Steps. |
|
|
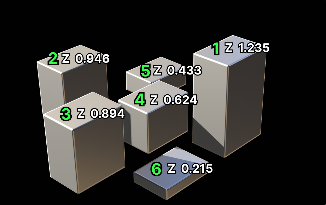
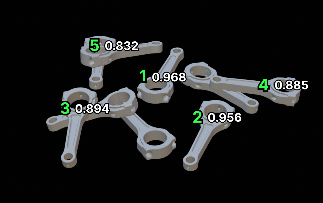
Sort by pose confidence
Function
This sorting type sorts poses according to the corresponding confidence. You can switch between ascending and descending order.
Usage Instructions
Once this sorting type is selected, a new “NumberList” input port will be added to the “Adjust Poses V2” Step for inputting the pose confidence. You should connect other Steps that output values to the new input port of the “Adjust Poses V2” Step. Then click Get data to receive the pose confidence.