Adapter Communication
After you learn basic concepts in Adapter Communication, complete Adapter communication tasks in the actual application deployment process based on your actual business requirements and your external device.
| This manual describes only the communication tasks in the deployment process. For details of other tasks in the deployment process, see Application deployment documents. |
| Task | Description |
|---|---|
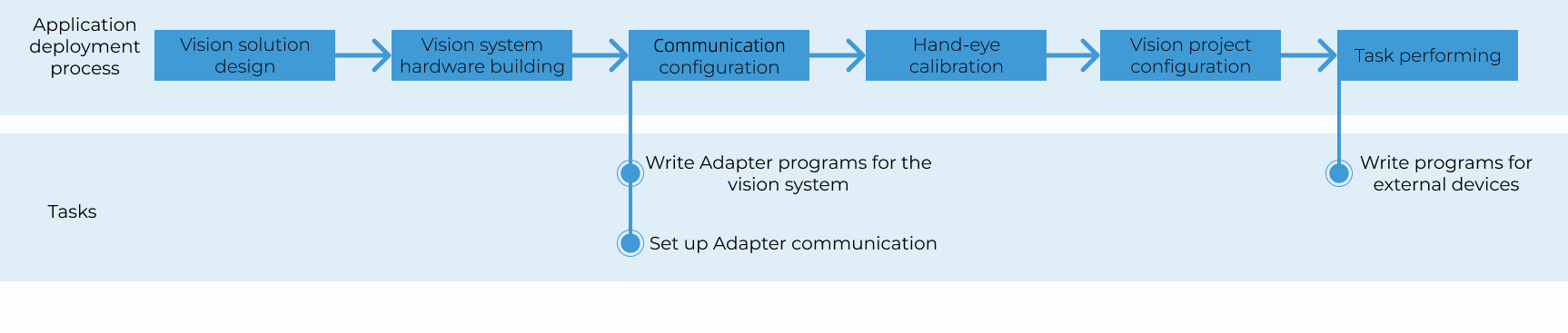
Write Adapter programs for the vision system |
Adapter programs connect external devices with the vision system. Adapter programs communicate with Mech-Vision and Mech-Viz internally and robots, PLCs, or host computers externally. Adapter programs are written in Python by using one of the following methods:
|
Set up the Adapter communication |
Configure Adapter programs in the vision system to make sure that the Adapter communication is supported in the vision system. For more information, see Quick Facts of Adapter. |
Write programs for external devices |
External device programs obtain the object information or robot motion path from the vision system and guide the robot, PLC, or host computer to perform operations accordingly. |