Example Program 14: MM_S14_Vis_GetUserData
Program Introduction
Description |
When the robot obtains the vision result, the robot also obtains the custom data from the Mech-Vision project. |
||
File path |
You can navigate to the installation directory of Mech-Vision and Mech-Viz and find the file by using the
|
||
Project |
Mech-Vision project (one or more custom ports needed to be added to the Output Step) |
||
Prerequisites |
|
| This example program is provided for reference only. Before using the program, please modify the program according to the actual scenario. |
Program Description
This part describes the MM_S14_Vis_GetUserData example program.
| Compared with the MM_S1_Vis_Basic example program, this example program contains only the following modification (the code of this modification is bolded). As such, only the modification is described in the following section. For information about the parts of MM_S14_Vis_GetUserData that are consistent with those of MM_S1_Vis_Basic, see Example Program 1: MM_S1_Vis_Basic. |
MODULE MM_S14_Vis_GetUserData
!----------------------------------------------------------
! FUNCTION: trigger Mech-Vision project and get vision result
! and custom data using command 110
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define local num variables
LOCAL VAR num pose_num:=0;
LOCAL VAR num status:=0;
LOCAL VAR num label:=0;
LOCAL VAR num offset_x:=0;
LOCAL VAR num offset_y:=0;
LOCAL VAR num offset_z:=0;
!define local joint&pose variables
LOCAL CONST jointtarget home:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL CONST jointtarget snap_jps:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget camera_capture:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget pick_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget pickpoint:=[[500,100,300],[0.00226227,-0.99991,-0.00439596,0.0124994],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
!define local tooldata variables
LOCAL PERS tooldata gripper1:=[TRUE,[[0,0,0],[1,0,0,0]],[0.001,[0,0,0.001],[1,0,0,0],0,0,0]];
PROC Sample_14()
!set the acceleration parameters
AccSet 50, 50;
!set the velocity parameters
VelSet 50, 1000;
!move to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
!initialize communication parameters (initialization is required only once)
MM_Init_Socket "127.0.0.1",50000,300;
!move to image-capturing position
MoveL camera_capture,v1000,fine,gripper1;
!open socket connection
MM_Open_Socket;
!trigger NO.1 Mech-Vision project
MM_Start_Vis 1,0,2,snap_jps;
!get vision result from NO.1 Mech-Vision project
MM_Get_DyData 1,pose_num,status;
!check whether vision result has been got from Mech-Vision successfully
IF status<>1100 THEN
!add error handling logic here according to different error codes
!e.g.: status=1003 means no point cloud in ROI
!e.g.: status=1002 means no vision result
Stop;
ENDIF
!close socket connection
MM_Close_Socket;
!save first vision point data to local variables
MM_Get_DyPose 1,pickpoint,label;
!save received custom data
offset_x:=MM_UserData{1};
offset_y:=MM_UserData{2};
offset_z:=MM_UserData{3};
!move to intermediate waypoint of picking
MoveJ pick_waypoint,v1000,z50,gripper1;
!move to approach waypoint of picking
MoveL RelTool(pickpoint,0,0,-100),v1000,fine,gripper1;
!move to picking waypoint
MoveL pickpoint,v300,fine,gripper1;
!add object grasping logic here, such as "setdo DO_1, 1;"
Stop;
!move to departure waypoint of picking
MoveL RelTool(pickpoint,0,0,-100),v1000,fine,gripper1;
!move to intermediate waypoint of placing
MoveJ drop_waypoint,v1000,z50,gripper1;
!move to approach waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move to placing waypoint
MoveL drop,v300,fine,gripper1;
!add object releasing logic here, such as "setdo DO_1, 0;"
Stop;
!move to departure waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move back to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
ENDPROC
ENDMODULEThe workflow corresponding to the above example program code is shown in the figure below.
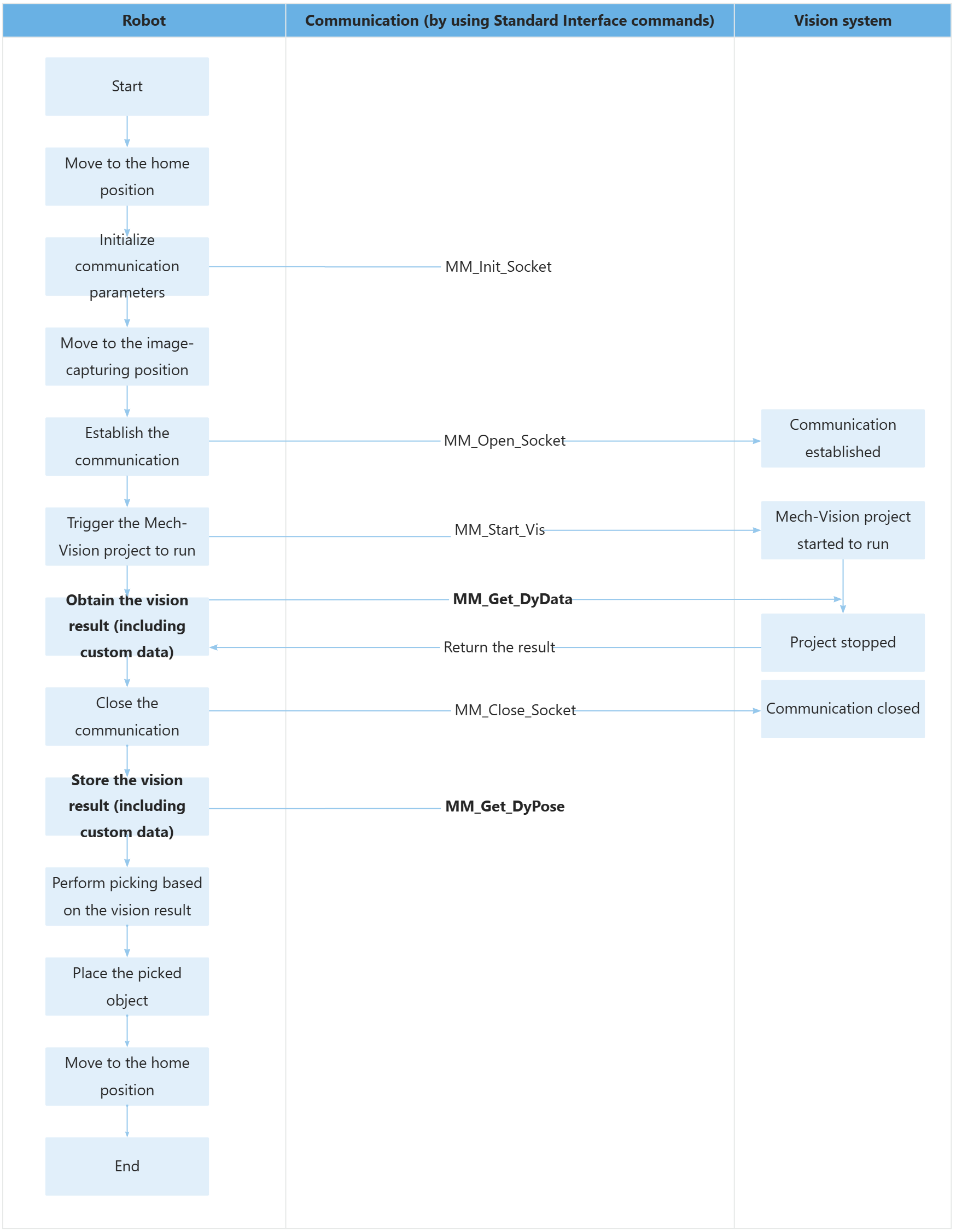
The table below describes the bolded code. You can click the hyperlink to the command name to view its detailed description.
| Feature | Code and description | ||||
|---|---|---|---|---|---|
Obtain the vision result (including the custom data) |
The entire statement indicates that the robot obtains the vision result from the Mech-Vision project with an ID of 1. The vision result includes custom data.
|
||||
Store the vision result (including the custom data) |
The entire statement stores the TCP, label, and custom data of the first vision point in the specified variables. The above code assigns the MM_UserData{1}, MM_UserData{2}, and MM_UserData{3} custom data that represents three vision points (picking waypoints) to offset_x, offset_y and offset_z, respectively.
|