Example Program 21: MM_S21_1Robot_3IPC_Sequentially
Program Introduction
Description |
The robot connects multiple IPCs, which means that one robot can control multiple vision systems. |
||
File path |
You can navigate to the installation directory of Mech-Vision and Mech-Viz and find the file by using the |
||
Project |
Mech-Vision and Mech-Viz projects
|
||
Prerequisites |
|
| This example program is provided for reference only. Before using the program, please modify the program according to the actual scenario. |
Program Description
This part describes the MM_S21_1Robot_3IPC_Sequentially example program.
| This example program focuses on how to connect one robot to multiple IPCs. For information about how a vision system runs on each IPC, see the relevant description in Example Program 5: MM_S5_Viz_SetBranch. |
1: !-------------------------------- ;
2: !FUNCTION: set up communication ;
3: !between 1Robot and 3IPC ;
4: !Sequentially ;
5: !Mech-Mind, 2024-4-25 ;
6: !-------------------------------- ;
7: ;
8: !set current uframe NO. to 0 ;
9: UFRAME_NUM=0 ;
10: !set current tool NO. to 1 ;
11: UTOOL_NUM=1 ;
12: LBL[10] ;
13: ;
14: !initialize communication ;
15: !parameters(initialization is ;
16: !required once change IPC tcp ;
17: !service ;
18: CALL MM_INIT_SKT('6','192.168.1.20',50000,5) ;
19: !trigger Mech-Viz project ;
20: CALL MM_START_VIZ(0,60) ;
21: WAIT .20(sec) ;
22: !set branch, "MM_SET_BCH ;
23: CALL MM_SET_BCH(1,1) ;
24: ;
25: !initialize communication ;
26: !parameters(initialization is ;
27: !required once change IPC tcp ;
28: !service ;
29: CALL MM_INIT_SKT('7','192.168.1.200',50000,5) ;
30: !trigger Mech-Viz project ;
31: CALL MM_START_VIZ(0,61) ;
32: WAIT .20(sec) ;
33: !set branch, "MM_SET_BCH ;
34: CALL MM_SET_BCH(1,2) ;
35: ;
36: !initialize communication ;
37: !parameters(initialization is ;
38: !required once change IPC tcp ;
39: !service ;
40: CALL MM_INIT_SKT('8','192.168.1.50',50000,5) ;
41: !trigger Mech-Viz project ;
42: CALL MM_START_VIZ(0,62) ;
43: WAIT .20(sec) ;
44: !set branch, "MM_SET_BCH ;
45: CALL MM_SET_BCH(1,2) ;
46: ;
47: !initialize communication ;
48: !parameters(initialization is ;
49: !required once change IPC tcp ;
50: !service ;
51: CALL MM_INIT_SKT('6','192.168.1.20',50000,5) ;
52: !get planned path, 1st argument ;
53: !(1) means getting pose in JPs ;
54: CALL MM_GET_VIZ(1,51,52,53) ;
55: !save the first waypoint of the ;
56: !planned path to local variables ;
57: !one by one ;
58: CALL MM_GET_JPS(1,70,71,72) ;
59: ;
60: !initialize communication ;
61: !parameters(initialization is ;
62: !required once change IPC tcp ;
63: !service ;
64: CALL MM_INIT_SKT('7','192.168.1.200',50000,5) ;
65: !get planned path, 1st argument ;
66: !(2) means getting pose in TCP ;
67: CALL MM_GET_VIZ(2,54,55,56) ;
68: !save the first waypoint of the ;
69: !planned path to local variables ;
70: !one by one ;
71: CALL MM_GET_POS(1,71,73,74) ;
72: ;
73: !initialize communication ;
74: !parameters(initialization is ;
75: !required once change IPC tcp ;
76: !service ;
77: CALL MM_INIT_SKT('8','192.168.1.50',50000,5) ;
78: !get planned path, 1st argument ;
79: !(1) means getting pose in JPs ;
80: CALL MM_GET_VIZ(1,57,58,59) ;
81: !save the first waypoint of the ;
82: !planned path to local variables ;
83: !one by one ;
84: CALL MM_GET_JPS(1,72,75,76) ;
85: ;
86: WAIT 5.00(sec) ;
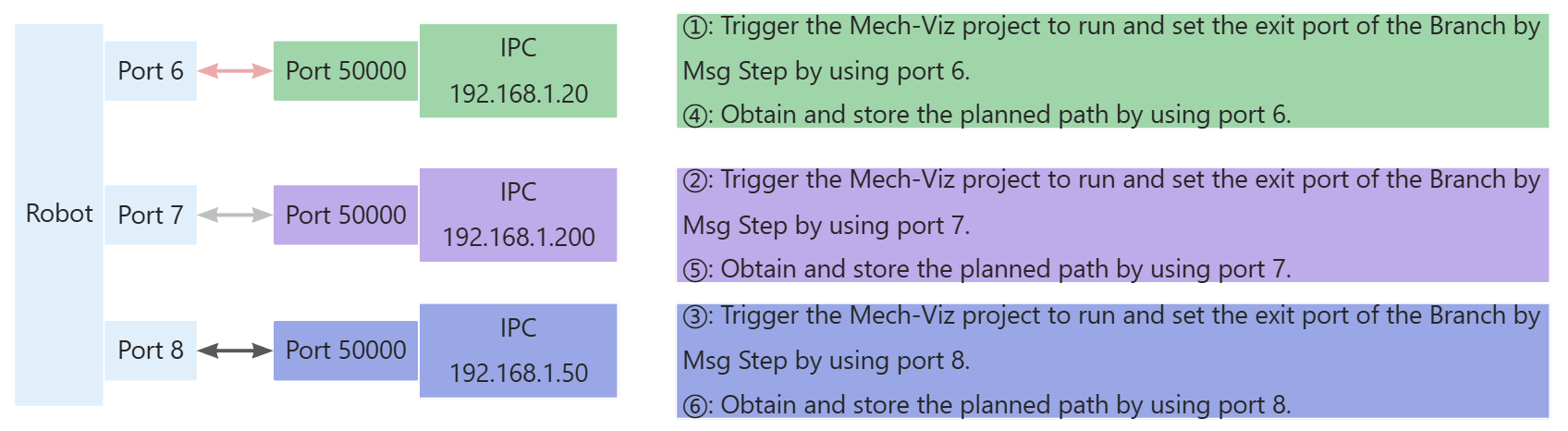
87: JMP LBL[10] ;The process corresponding to the above example program code is shown in the figure below. ① to ⑥ indicate the sequence in which the program is executed.
The table below describes the above code. You can click the hyperlink to the command name to view its detailed description.
| IPC IP address and port number | Code and description | ||
|---|---|---|---|
192.168.1.20:50000 |
To set up communication between the robot and the IPC, use the robot’s port 6, the IP address 192.168.1.20, and port 50000 of the IPC. The procedure is as follows.
|
|
A FANUC robot provides 8 ports in system settings, as shown in the following figure. When you use an undefined port in the MM_INIT_SKT command, you need to restart the controller for the changes to take effect. Otherwise, the robot will be unable to communicate with the vision system and an error will be reported. 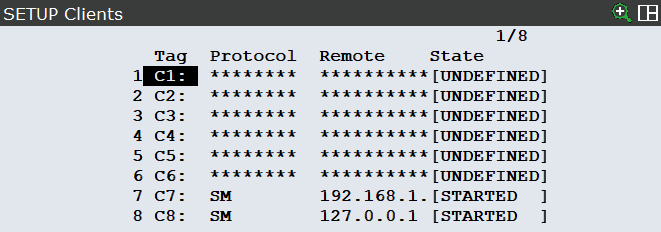
|