2D 매칭
응용 시나리오
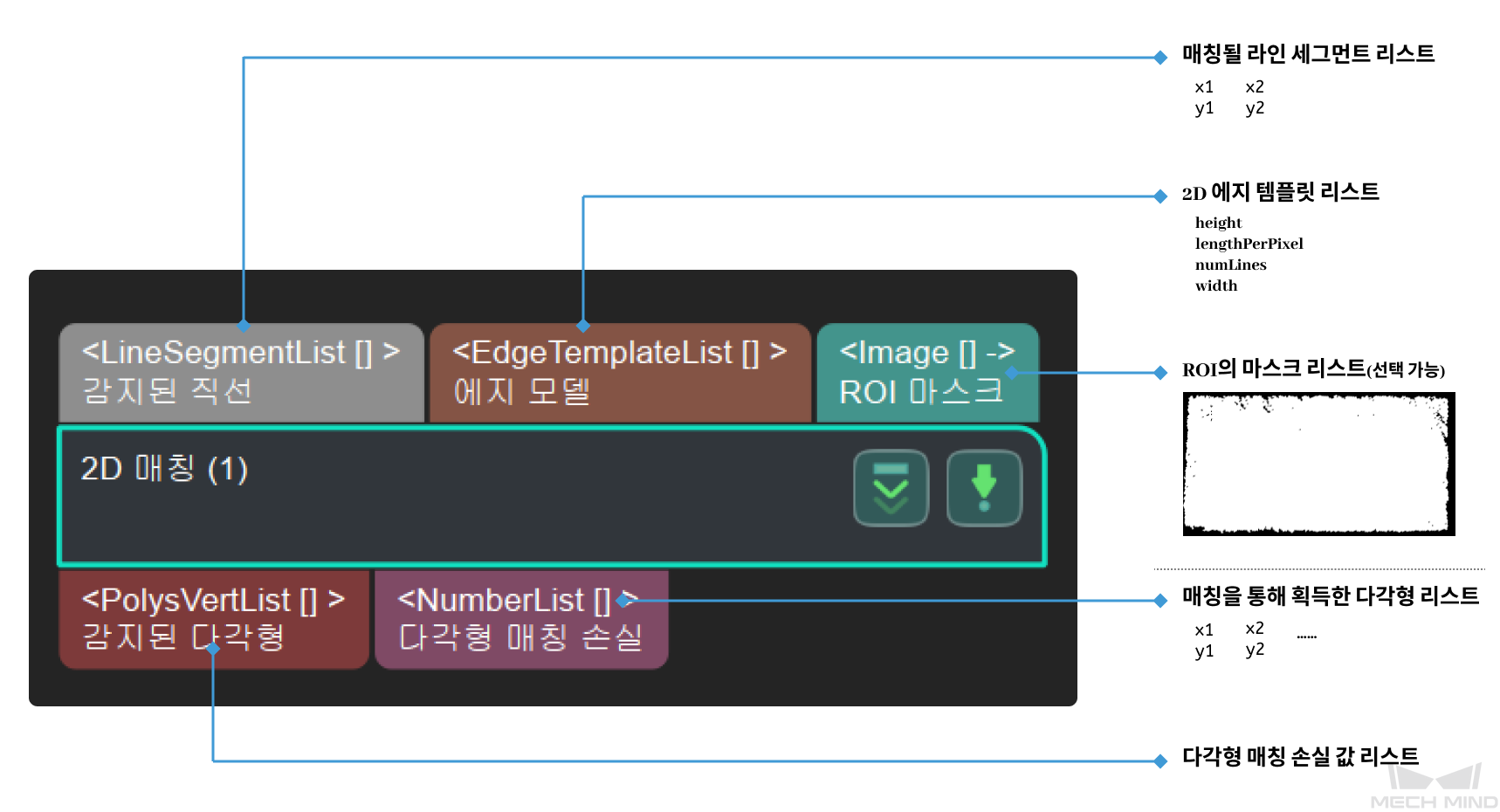
2D 이미지에서 다각형 물체의 위치를 지정하고 후속 다각형의 3D 포즈를 계산하는 데 감지된 다각형 특징을 제공합니다. 일반적으로 마스크 외부에 있는 다각형을 제거하기 스텝과 함께 사용됩니다.
파라미터 설명
모델 변형
- 윤곽선 각도 양자화(1~360)
-
기본값: 60
조절 설명: 윤곽선 방향을 계량화하고 분해합니다. 직사각형을 예로: 직사각형은 180도 대칭이기 때문에 180도를 계량화합니다. 입력할 파라미터는 계량화 부수입니다. 90으로 설정된다면 180°/90=2°. 계량화 부수가 많을수록 테두리가 더욱 정교하게 보이지만 시간이 더 많이 걸립니다.
조절 예시:
파라미터를 ``30``으로 설정 시 스텝의 실행 시간과 계량화 결과는 아래 그림과 같습니다.
파라미터를 ``90``으로 설정 시 스텝의 실행 시간과 계량화 결과는 아래 그림과 같습니다.
- 각도 손실 가중치
-
기본값: 0.1
조절 설명: 이 수치가 높을수록 결과가 더욱 정확하지만 시간이 더 믾이 걸립니다.
- 기초 스케일 비율
-
기본값: 1.1
조절 설명: 모델은 “기초 스케일 비율”, “비율 지수”를 통해 크기 조정을 합니다. “비율 지수”는 [“최소 스케일 지수”,“최대 스케일 지수”] 내의 정수입니다. 수치가 높을수록 정확하게 매칭하는 가능성이 더욱 크지만 시간이 더 많이 걸립니다.
- 최소 스케일 지수
-
기본값: 0
조절 설명: 참고치: -3、-2、-1、0. 수치가 낮을수록 정확하게 매칭하는 가능성이 더욱 크지만 시간이 더 많이 걸립니다.
- 최대 스케일 지수
-
기본값: 0
조절 설명: 참고치: 0、1、2、3. 수치가 높을수록 정확하게 매칭하는 가능성이 더욱 크지만 시간이 더 많이 걸립니다.
- 기본 종횡비
-
기본값: 1.1
조절 설명: 모델은 “기초 종횡비”, “종횡비 지수”를 통해 크기 조정을 합니다. “종횡비 지수”는 [ “최소 종횡비”,“최대 종횡비”] 내의 정수입니다. 수치가 높을수록 정확하게 매칭하는 가능성이 더욱 크지만 시간이 더 많이 걸립니다.
- 최소 종횡비 지수
-
기본값: 0
조절 설명: 참고치: -3、-2、-1、0. 수치가 낮을수록 정확하게 매칭하는 가능성이 더욱 크지만 시간이 더 많이 걸립니다.
- 최대 종횡비 지수
-
기본값: 0
조절 설명: 참고치: 0、1、2、3. 수치가 높을수록 정확하게 매칭하는 가능성이 더욱 크지만 시간이 더 많이 걸립니다.
후보 검색 설정
- 물체의 대략적인 포즈(0~360)
-
기본 값: 0°
조절 설명: 시나리오에 있는 물체의 대략적인 방향을 뜻합니다. 단위는 도(°)입니다. 직사각형의 경우 수평 방향을 0° 방향으로, 수직 방향을 90° 방향으로 정의합니다.
- 물체 포즈 각도의 변화 범위(0~180)
-
기본 값: 90°
조절 설명: 시나리오에서 물체 포즈가 변화하는 범위를 뜻합니다. 단위는 도(°)입니다.
- 템플릿의 평행이동 보폭
-
기본값: 5.000 mm
조절 설명: 이 수치가 낮을수록 결과가 더욱 정확하지만 시간이 더 많이 걸립니다. 단위: 밀리미터(mm).
- 템플릿의 회전 이동 보폭(0~180)
-
기본값: 1.5000°
조절 설명: 이 수치가 낮을수록 결과가 더욱 정확하지만 시간이 더 많이 걸립니다. 단위는 도(°)입니다.
역치 설정
- 평균 거리 오차에 대한 상한 역치
-
기본값: 8.000 mm
조절 설명: 매칭 템플릿의 최대 평균 거리 오차입니다. 단위: 밀리미터(mm). 수치가 높을수록 결과가 더욱 정확합니다.
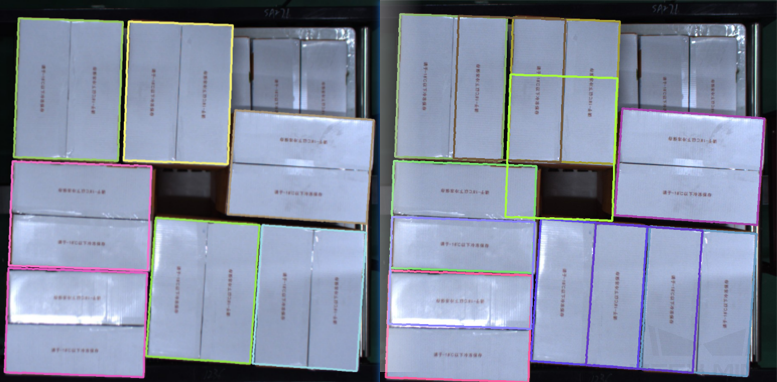
조절 예시: 아래 그림과 같이 왼쪽은 기본 상태에서 출력한 결과이고 오른쪽은 파라미터가 0.002 시 출력한 결과입니다.

- 겹치는 비율의 역치(0~1.0)
-
기본값: 0.5
조절 설명: 결과 중 겹치는 비율이 이 수치보다 높으면 삭제될 것입니다. 이 수치가 높을수록 더 많은 겹치는 결과를 출력할 것입니다.
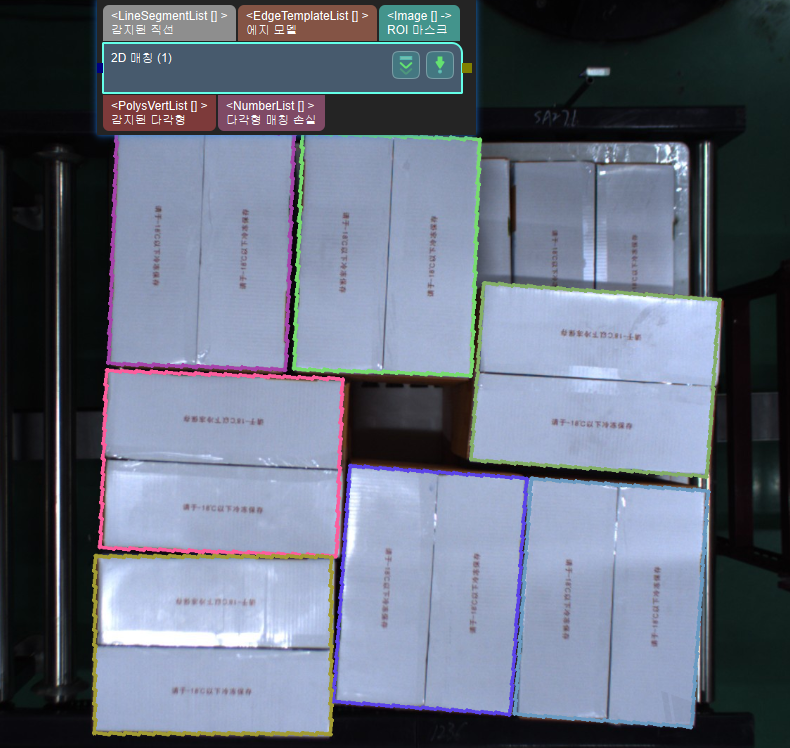
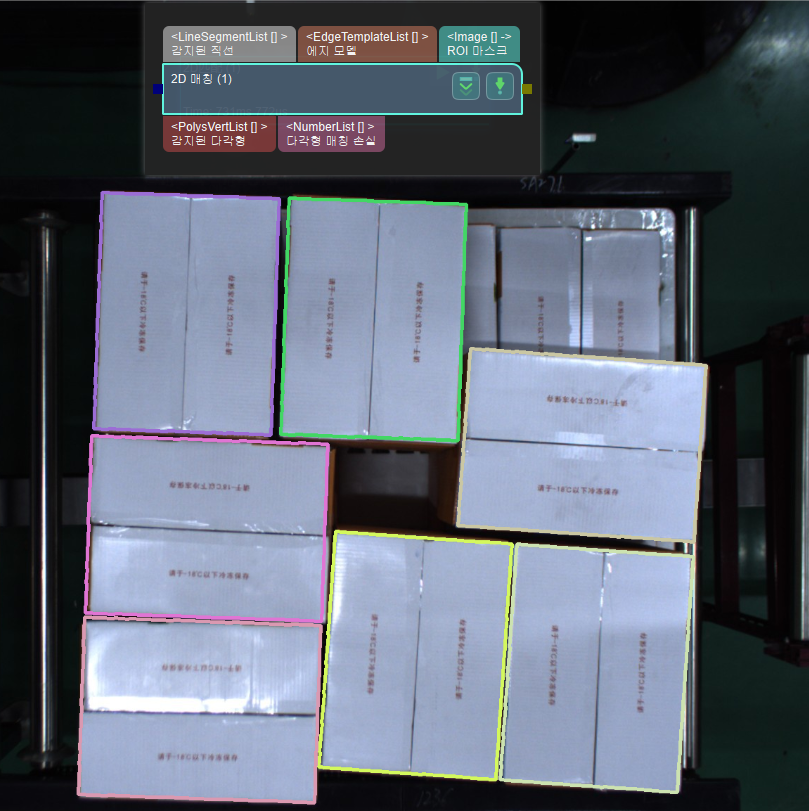
조절 예시: 아래 그림과 같이 왼쪽은 파라미터가 0.2 시 출력한 결과이고 오른쪽은 파라미터가 0.5 시 출력한 결과입니다.