通信方式の紹介
ビジョンシステムのハードウェア設置が完了した後、Mech-Mindビジョンシステムと外部機器(ロボット、PLC、上位システムなど)の間で通信方式を選択し、両者間のデータのやり取りを実現します。Mech-Mindビジョンシステムは、以下の3種類の通信方式をサポートしています。
| 標準インターフェース通信とAdapter通信を総称してインターフェース通信と呼びます。 |
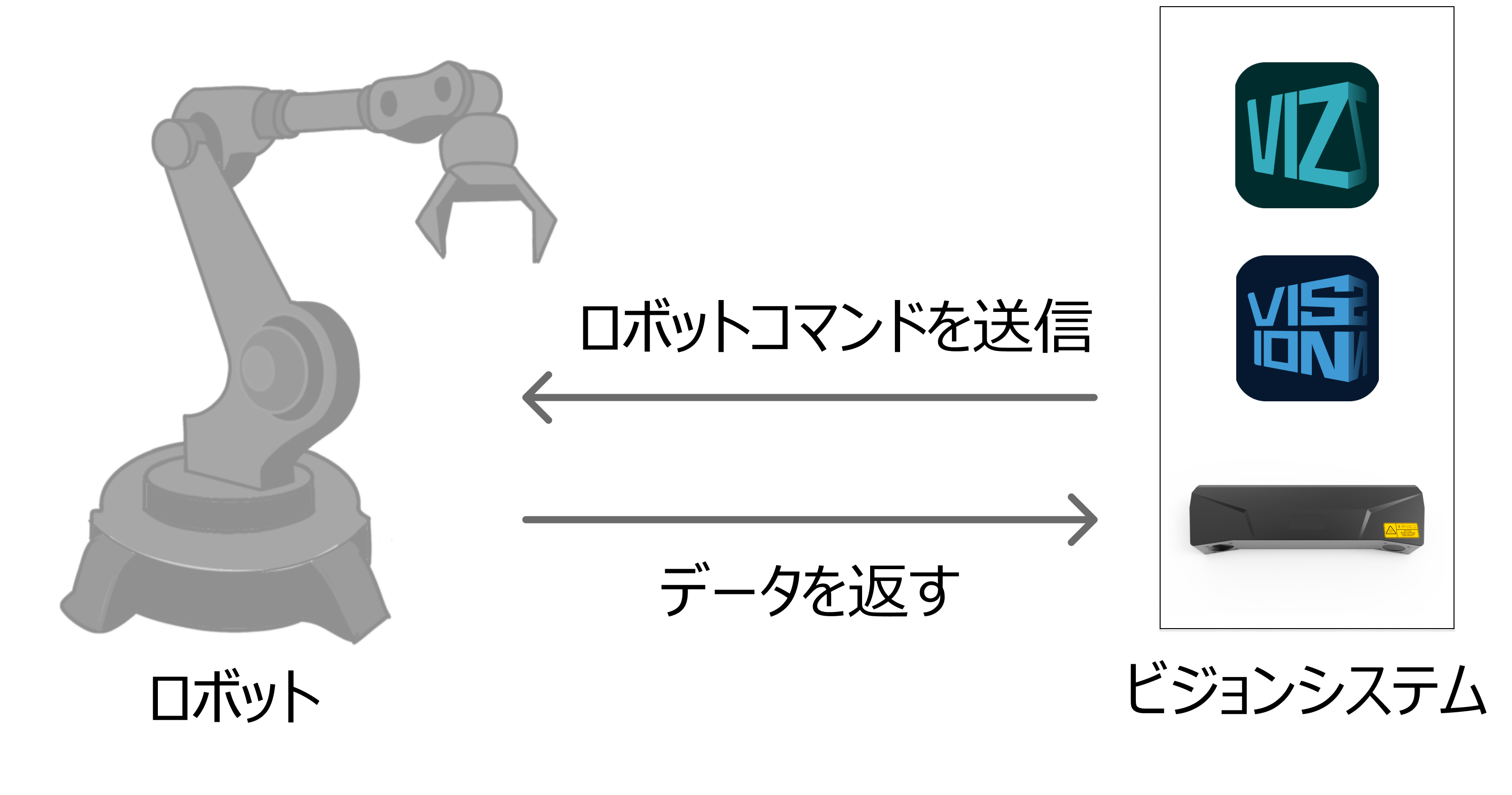
Vizティーチング通信
ビジョンシステムがロボットを制御してタスクを実行する場合、すなわちビジョンシステムが制御側、ロボットが被制御側となる通信方式を「Vizティーチング通信」と呼びます。この通信方式では、ビジョンシステムがロボットにコマンドを送信し、ロボットがそのコマンドを受信して実行します。
|
Vizティーチング通信の実装方法は、主に以下の2種類に分かれます。
-
ロボットにVizとの通信プログラムを読み込む必要がある場合
この場合、ロボットはビジョンシステムによる制御を受けるため、読み込まれたVizとの通信プログラムを継続的に実行します。ABB、FANUC、KUKAなどのロボットは、この方式でVizティーチング通信を行います。
-
ロボットにVizとの通信プログラムを読み込む必要がない場合
この場合、ロボットを リモート制御 モードに切り替え、ビジョンシステムがロボットメーカーが提供するSDK(ソフトウェア開発キット)を介して直接制御を行います。つまり、ロボット側で追加のフォアグラウンドプログラムを実行する必要はありません。AE、JAKAなどのロボットは、この方式でVizティーチング通信を行います。
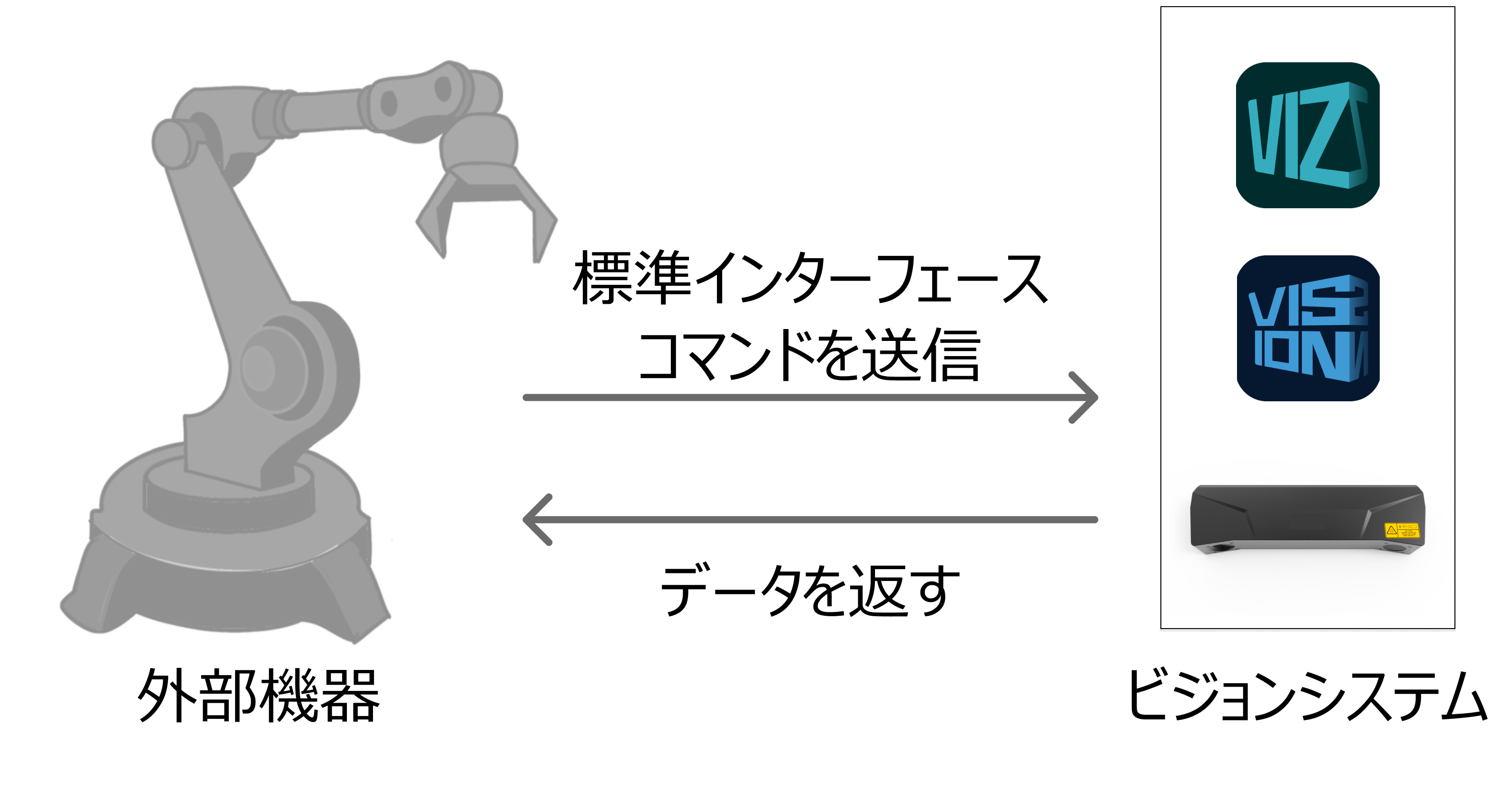
標準インターフェース通信
外部機器(ロボット、PLC、上位システムなど)がビジョンシステムに標準インターフェースコマンドを送信し、ビジョンシステムがそれを受信して対応するデータを返す通信方式を「標準インターフェース通信」と呼びます。この通信方式では、ビジョンシステムは外部機器を制御せず、を制御することはなく、外部機器から送信されたコマンドに応答するのみです。そのため、外部機器側でビジョンシステムと通信するためのプログラムを作成する必要があります。
|
標準インターフェースコマンドは、Mech-Mindが標準的な通信プロトコルに基づいて開発したコマンド群であり、コマンド要求および応答データの形式を定義しています。これらのコマンドは、Mech-VisionまたはMech-Vizプロジェクトを設定し、その出力結果を返す機能を持ちます。 |
標準インターフェース通信の実装方法は、主に以下の2種類に分かれます。
-
Mech-Mindビジョンシステムが外部機器に対応している場合:標準インターフェースコマンドを直接使用できます。詳細は、標準インターフェース通信対応状況一覧表 をご参照ください。
-
Mech-Mindビジョンシステムが外部機器に対応していない場合:標準インターフェースを使用して通信するために、対応する標準インターフェースコマンドを作成する必要があります。詳細は、標準インターフェース開発者向けマニュアル をご参照ください。
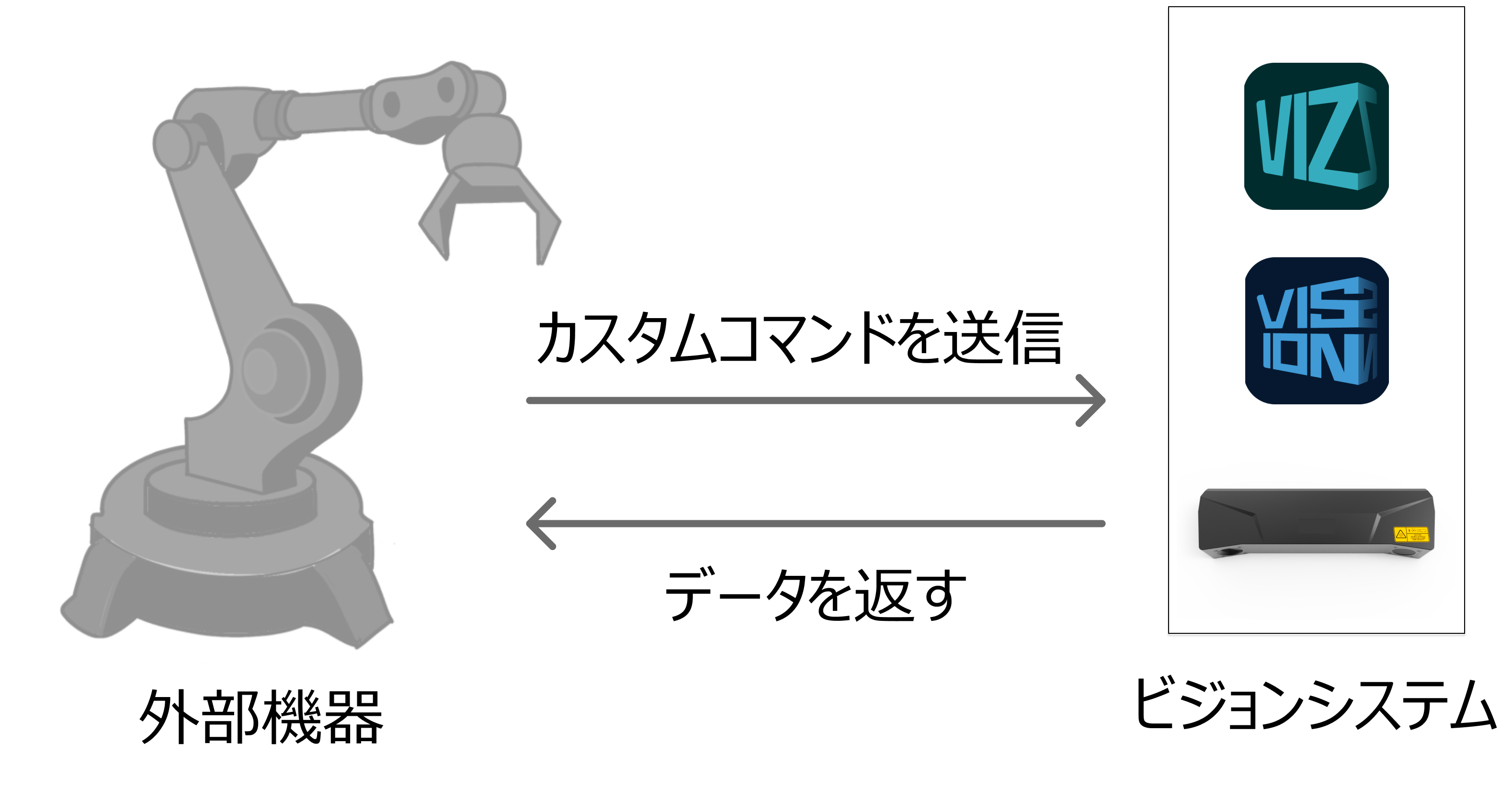
Adapter通信
外部機器(ロボット、PLC、上位システムなど)がユーザー定義のコマンドをビジョンシステムへ送信し、ビジョンシステムがそのコマンドを受信して対応するデータを返す通信方式を「Adapter通信」と呼びます。この通信方式では、通信双方がカスタムコマンドを定義する必要があります。そのため、ビジョンシステム側および外部機器側の双方でプログラムを作成する必要があります。
|
Adapter通信の実装方法は、以下の2種類に分かれ、いずれもPythonプログラムによって実現されます。
-
Adapterプロジェクトの生成ツール を使用する方法:通信双方のコマンド形式を迅速に設定できます。生成されたコマンドが要件を満たさない場合は、Pythonを用いて拡張が可能です。
-
Adapterプログラミングガイド に基づきゼロから開発する方法:通信双方のコマンド形式を完全にカスタマイズして構築します。
通信方式の比較
以下では、3種類の通信方式を比較し、それぞれの特徴および適用シーンについて説明します。
通信双方からのコマンドの送受信について、3種類の通信方式の違いを下表に示します。
| 通信方式 | コマンド形式 | コマンドの送信元 | コマンドの受信先 |
|---|---|---|---|
Vizティーチング通信 |
ロボットコマンド |
ビジョンシステム |
ロボット |
標準インターフェース通信 |
標準インターフェースコマンド |
外部機器(ロボット、PLCまたは上位システム) |
ビジョンシステム |
Adapter通信 |
カスタムコマンド |
外部機器(ロボット、PLCまたは上位システム) |
ビジョンシステム |
3種類の通信方式がサポートする通信プロトコル、使いやすさ、柔軟性の違いを下表に示します。
| 通信方式 | サポートする通信プロトコル | プログラムの追加作成 | 使いやすさ | 柔軟性 |
|---|---|---|---|---|
Vizティーチング通信 |
TCP、UDP |
必要なし |
低 |
低 |
標準インターフェース通信 |
TCP UDP Siemens PLC Snap7 PROFINET EtherNet/IP Modbus TCP Mitsubishi MC |
外部機器側でプログラムの作成が必要 |
中 |
中 |
Adapter通信 |
TCP UDP HTTP WebSocket Siemens PLC Snap7 PROFINET EtherNet/IP Modbus TCP Mitsubishi MC その他の通信プロトコル |
ビジョンシステム側・外部機器側でプログラムの作成が必要 |
高 |
高 |
3種類の通信方式に対応可能なシーンを下表に示します。
| 通信方式 | 部品供給 | パレタイジング・デパレタイジング | 位置決め・組立 | 商品仕分け | 接着剤塗布 |
|---|---|---|---|---|---|
Vizティーチング通信 |
〇 |
〇 |
〇 |
〇 |
〇 |
標準インターフェース通信 |
〇 |
〇 |
〇 |
〇 |
× |
Adapter通信 |
〇 |
〇 |
〇 |
〇 |
〇 |
3種類の通信方式を理解した後、実際のプロジェクト要件に応じて適切な 通信方式を選択 してください。