標準インターフェース通信設定(CR シリーズ)
以下では、DOBOT CRシリーズの標準インターフェース通信の設定方法を説明します。
事前準備
ハードウェアとソフトウェアのバージョンを確認
|
本文に記載されている型番およびバージョンは、動作確認に使用したものです。その他の型番やバージョンについても、本文を参考に操作をお試しください。問題が発生した場合は、Mech-Mindのテクニカルサポートまでお問い合わせください。 |
-
PC制御ソフトウェア:DobotStudio Pro v2.7.1
DOBOTダウンロードセンター にアクセスし、コントローラーソフトウェア エリアで使用するバージョンの  をクリックしてダウンロードしてからインストールします。
をクリックしてダウンロードしてからインストールします。
-
コントローラ型番:CC-162
-
コントローラバージョン:3.5.6.1-stable
コントローラのバージョンを確認
-
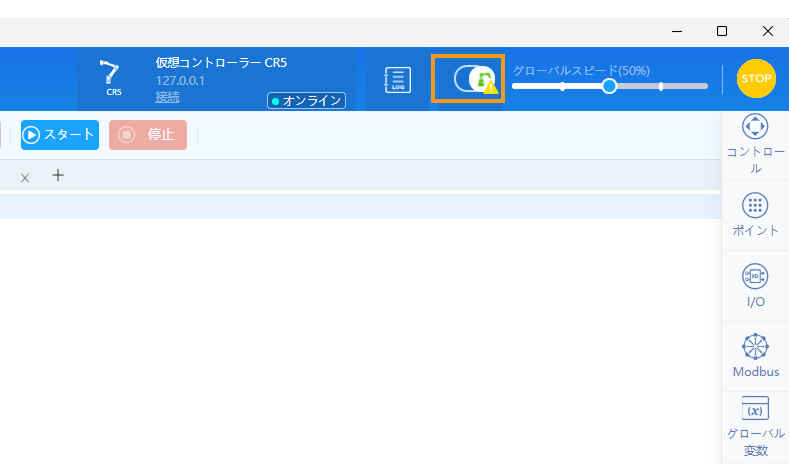
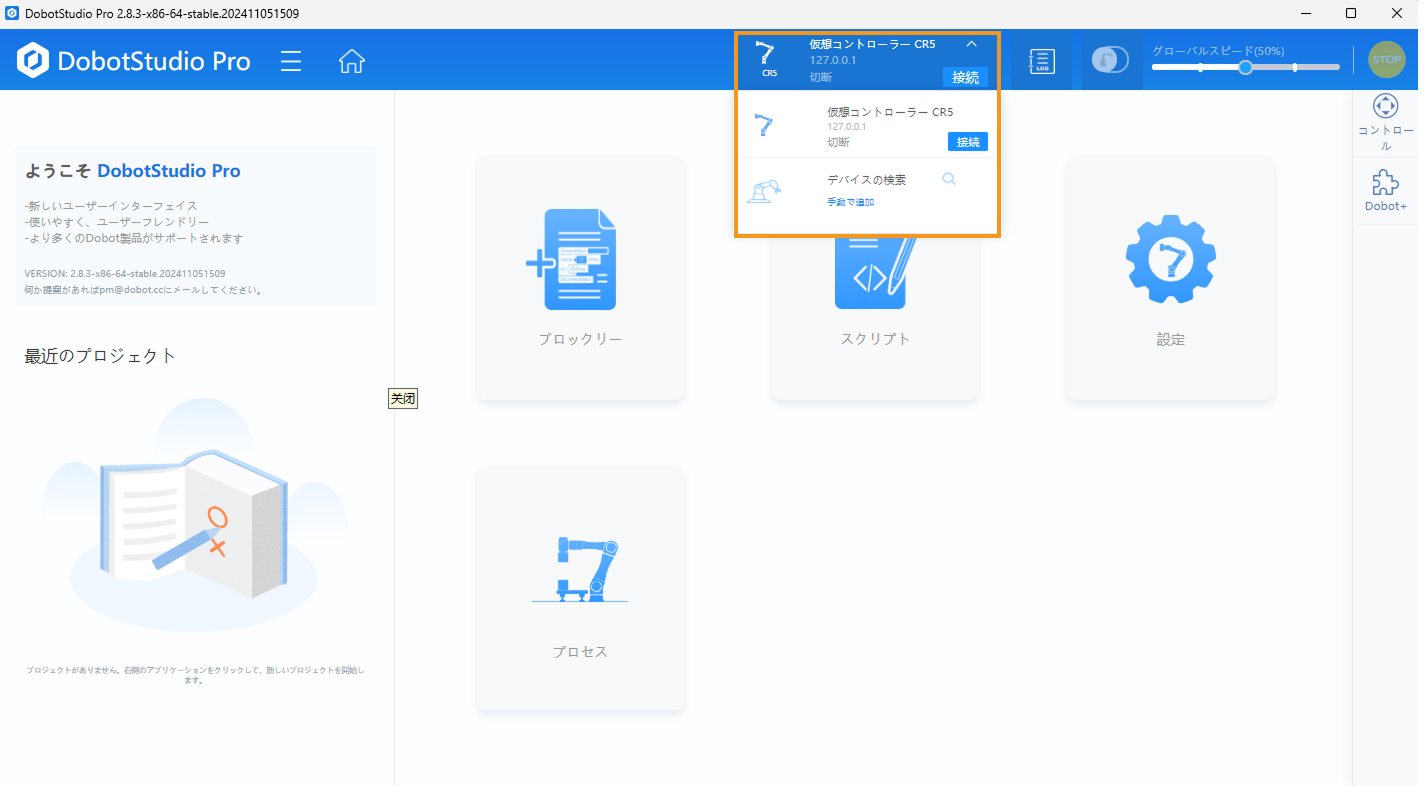
インストールしたDobotStudio Proソフトウェアを開き、枠で囲まれたエリアでロボットを接続します。
-
ソフトウェアにツールバーの
 アイコンをクリックし、設定 をクリックします。
アイコンをクリックし、設定 をクリックします。
-
設定 パネルの をクリックします。基本設定 パネルの 仕様 エリアでコントローラのバージョンが確認できます。

ネットワーク接続を確立
IPアドレスを設定
-
DobotStudio Proのツールバーの
アイコンをクリックして 設定 をクリックします。
-
設定 パネルの をクリックします。通信設定 パネルでロボットのIPアドレスを設定します。ロボットのIPアドレスをIPCのIPアドレスと同じネットワークセグメントにある必要があります。つまり、両方のIPアドレスのネットワーク部分とサブネットマスクが同じである必要があります。例えば、192.168.100.2/255.255.255.0と192.168.100.3/255.255.255.0は同じネットワークセグメントにあります。

| この手順を実行する前に、DobotStudio Proにロボットを接続しておいてください。ロボット接続の方法は、コントローラのバージョン確認 の手順1をご参照ください。 |
「ロボット通信設定」を実行
-
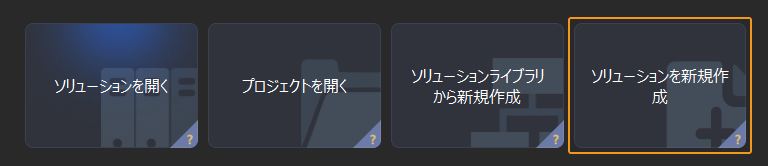
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 ドロップダウンリストから 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
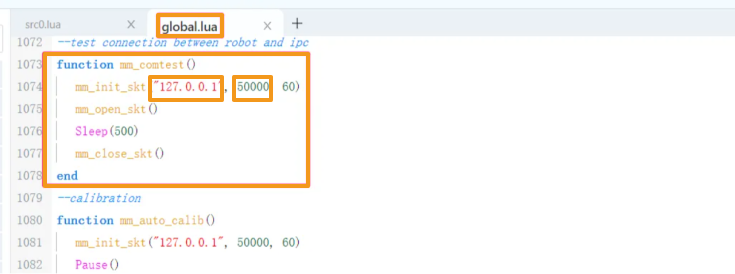
ポート番号は50000または50000以上に設定することを推奨します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
ロボット読み込みの説明 の下で、プログラムフォルダを開く をクリックします。
その後、読み込みファイルはこのフォルダからコピーされますので、フォルダウィンドウを閉じないようにしてください。 -
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-

-
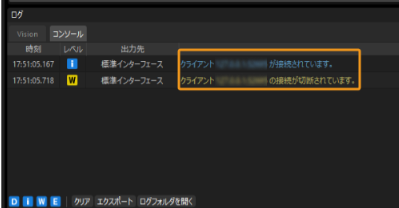
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
ファイルの読み込み
-
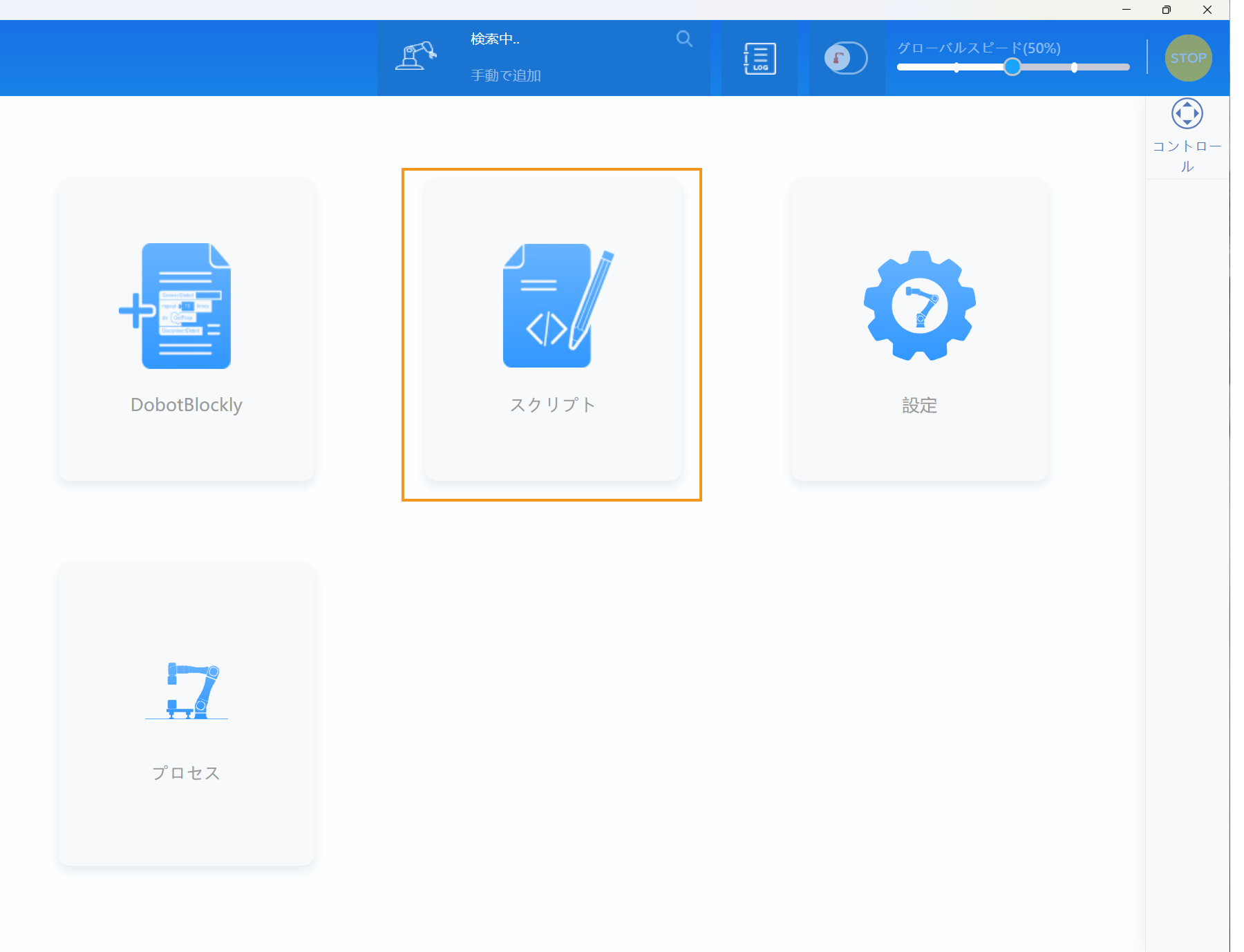
DobotStudio Proのメイン画面の スクリプト をクリックして新規作成します。新規作成したプロジェクトには、以下のようにsrc0.luaとglobal.luaの2つの空のファイルがあります。
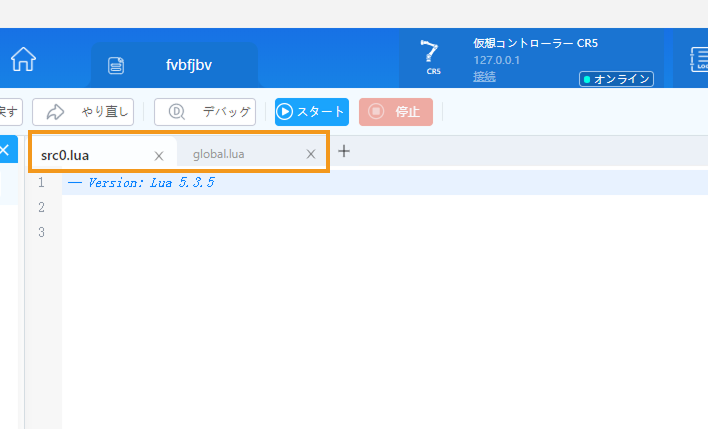
この手順を実行する前に、DobotStudio Proにロボットを接続しておいてください。ロボット接続の方法は、コントローラのバージョン確認 の手順1をご参照ください。 -
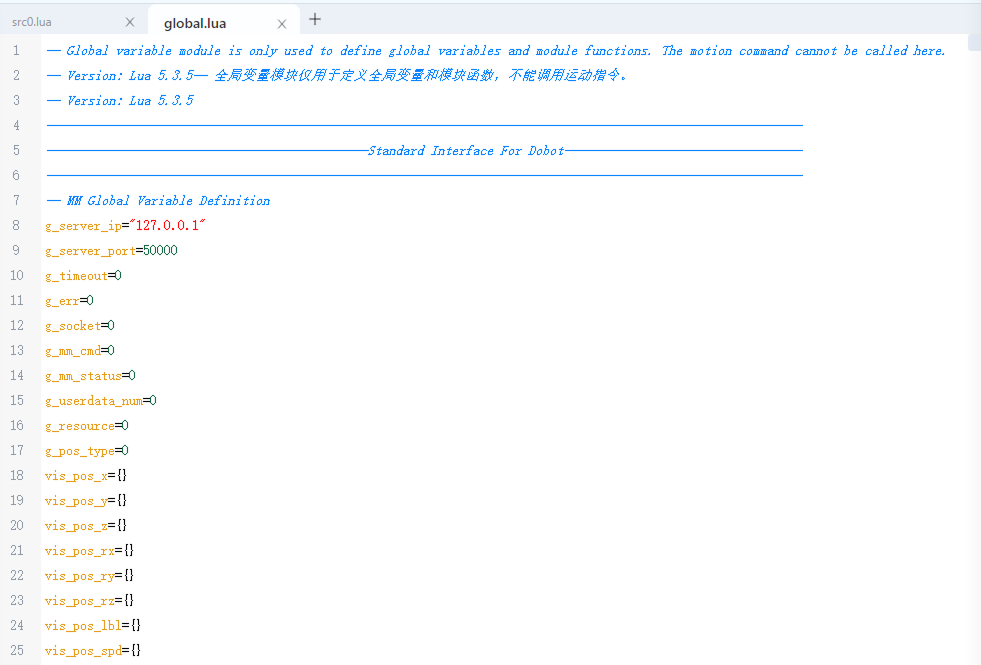
読み込みファイル(
DOBOTフォルダ)で、CRフォルダにあるglobal.luaファイルを開きます。global.luaファイルの内プログラミングプロジェクトの同名ファイルglobal.luaにコピーします。読み込みプログラムフォルダは、Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある Communication Component/Robot_Interface/DOBOTパス内でも見つけることができます。