ABBロボットで標準インターフェースプログラムをバックグラウンドで実行する方法
ABBロボットの場合、メインタスクがサブタスクを呼び出す際、メインタスクはフォアグラウンドで、サブタスクはバックグラウンドで実行されます。バックグラウンドプログラムは、ロボットが起動した後、自動実行される必要があります。以下では、ABBロボットで標準インターフェースプログラムをバックグラウンドで実行する方法を説明します。
| 設定を開始する前に、ABBロボットの標準インターフェース通信設定 が完了したことを確認してください。 |
バックグラウンドプログラムの作成・実行
-
下図のように、RobotStudioを起動してロボットに接続します。 をクリックし、バックグラウンドで実行するサブタスク(例:mm_vision)を作成します。
初めてサブタスクを作成する際、タスクのTypeをNormalに一時設定し、このモードでプログラムコードを書きます。プログラムをテストした後、タスクのTypeをSemistatic(バックグラウンドで自動実行と意味する)に変更します。 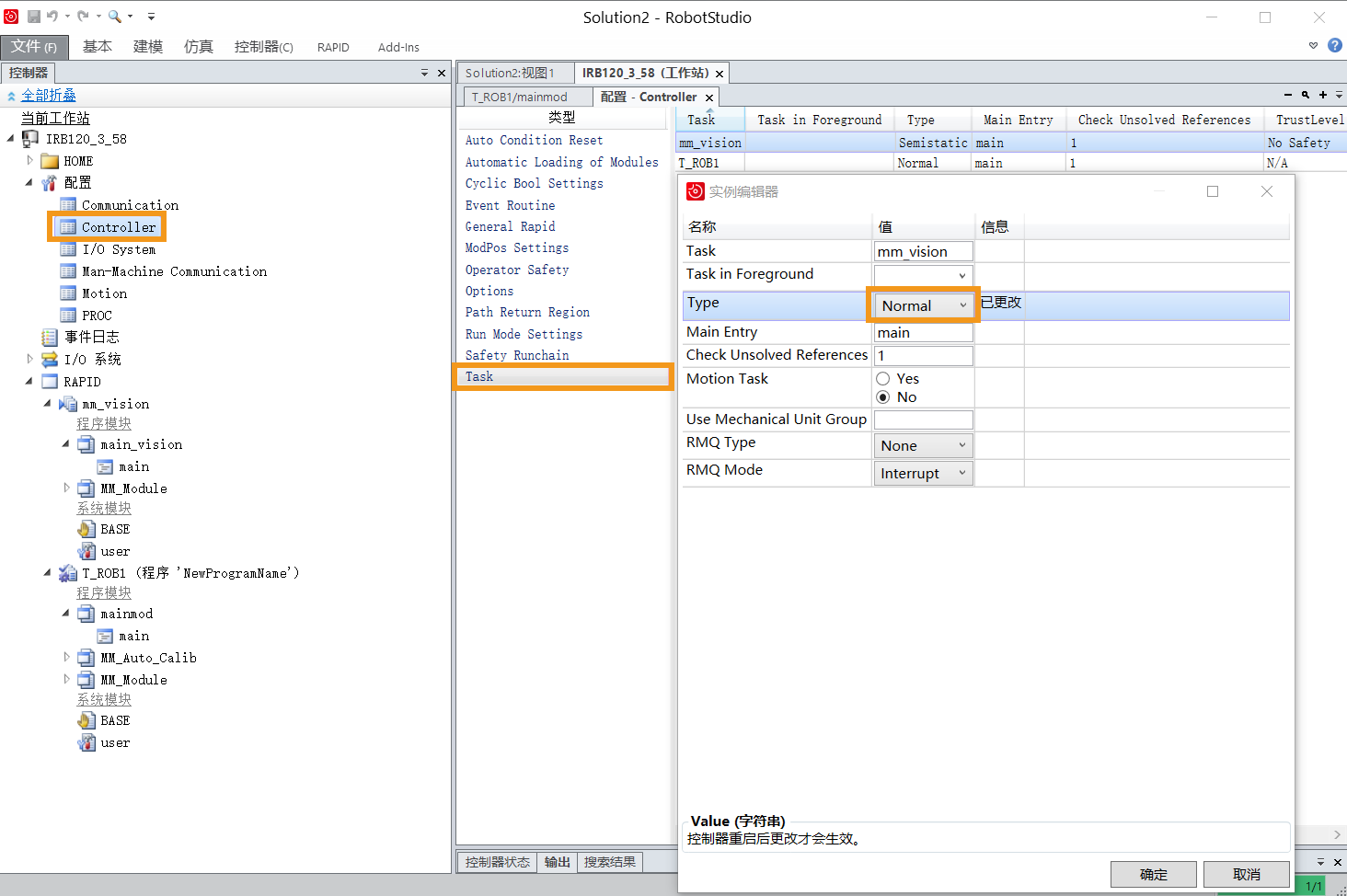
-
コントローラを再起動します。
-
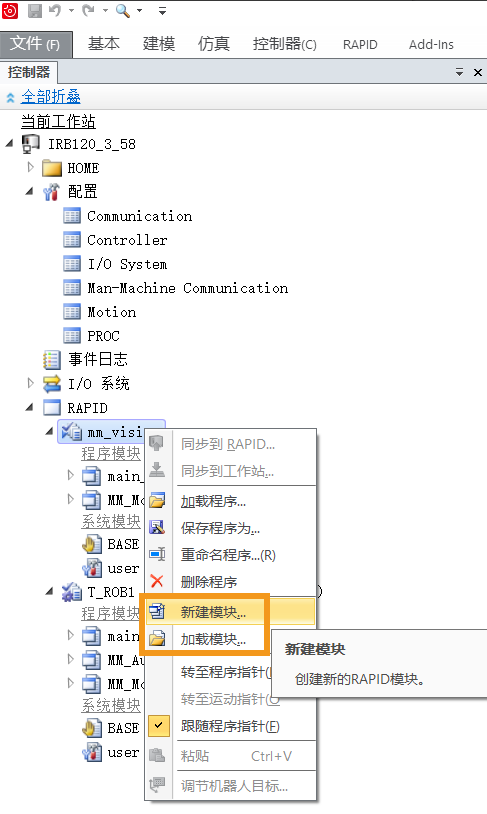
コントローラを再起動した後、タスクmm_visionで、標準インターフェースモジュールMM_Moduleを読み込みます。モジュールmain_visionを新規作成します。
-
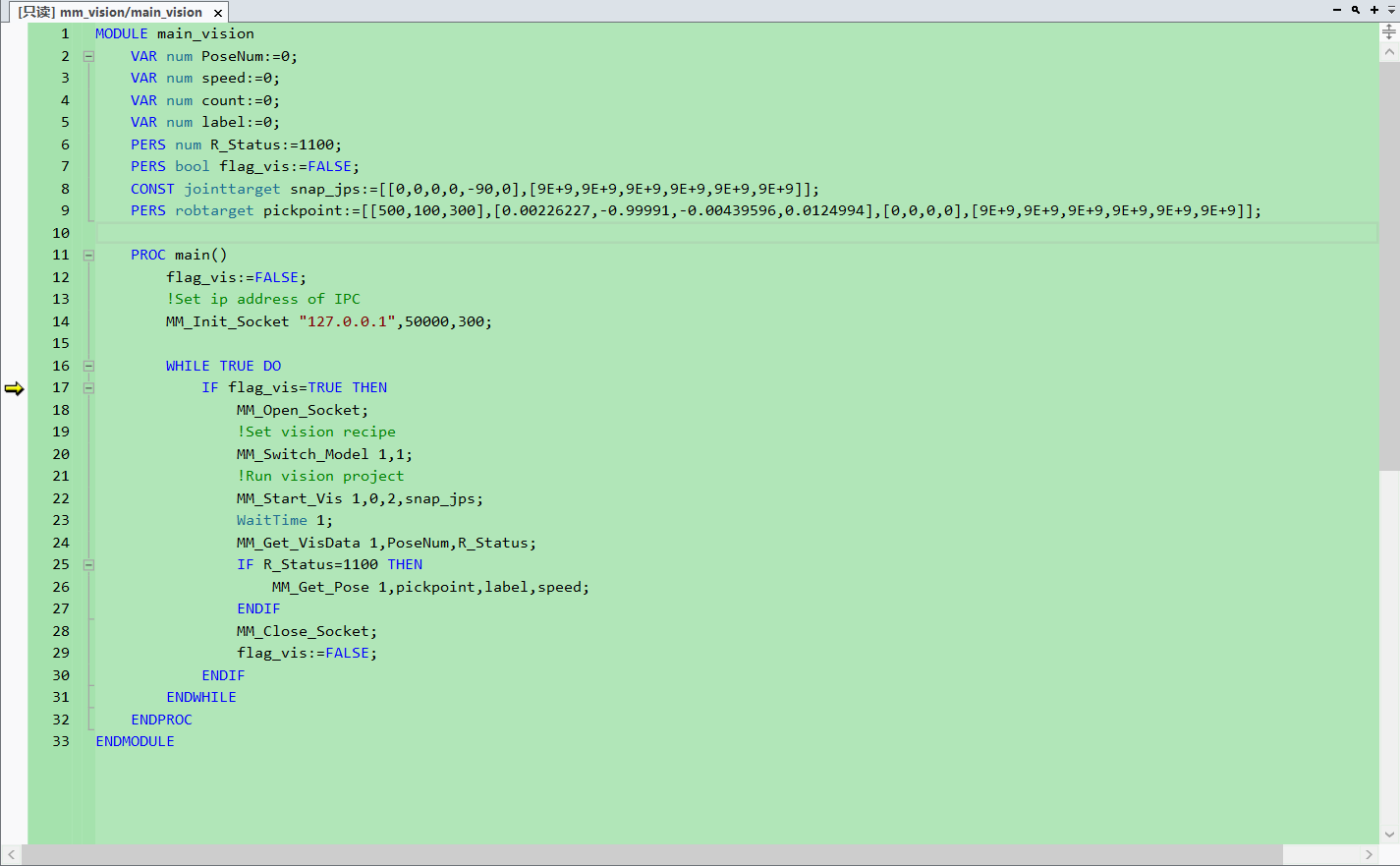
モジュールmain_visionを開きます。ここに、サブタスクに関連するコードを書きます。例のコードは、Mech-Visionプロジェクトを実行し、ビジョン結果を取得するために使用されます。
-
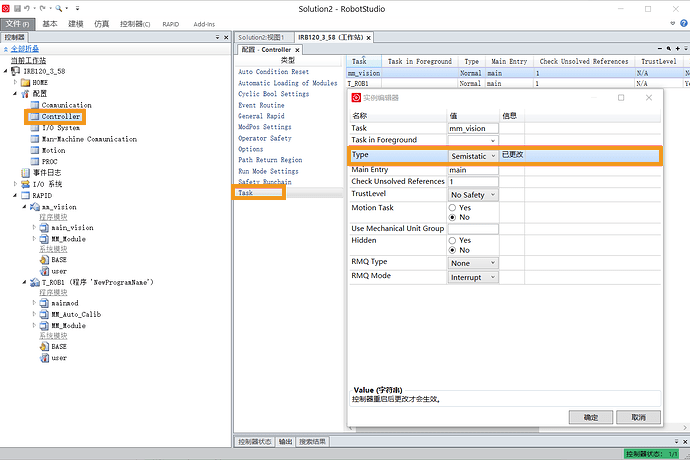
上記のコードをテストした後、下図のように、バックグラウンドプログラムmm_visionのTypeをSemistaticに変更し、コントローラを再起動します。再起動した後、バックグラウンドプログラムは自動実行されます。
フォアグラウンドプログラムの作成・実行
-
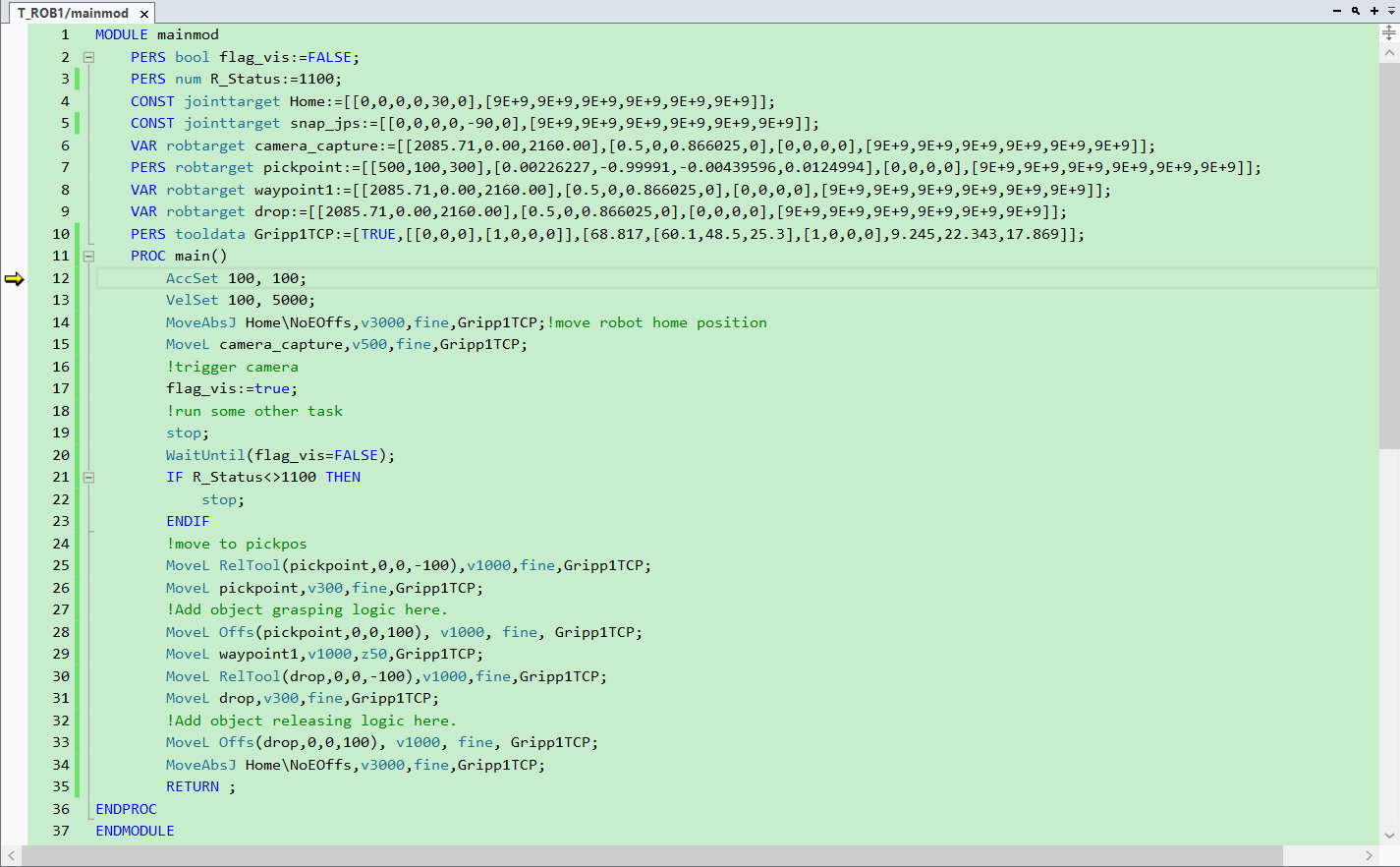
実際のワークフローに応じて、メインタスク(フォアグラウンドプログラム)を新規作成します。例のコードは、flag_visがtrueの場合、メインタスクがサブタスクを呼び出すために使用されます。
-
バックグラウンドプログラムの正常実行を確認した後、上記のフォアグラウンドプログラムを実行します。詳細は、キャリブレーションプログラムの実行 をご参照ください。