標準インターフェース通信設定
以下では、標準インターフェースプログラムをTMロボット(制御ソフトウェアはTMflow 2)に読み込み、Mech-Mindビジョンシステムとロボット間の標準インターフェース通信設定の手順を説明します。
事前準備
設定を行う前に、以下のことを確認してください。
-
ロボット制御ソフトウェアTMFlowのバージョンが2.18であることを確認します。
2.18は、動作確認時に使用されたバージョンです。その他のバージョンについても、本文を参考に操作をお試しください。問題が発生した場合は、Mech-Mindのテクニカルサポートまでお問い合わせください。 -
ロボットのIPアドレス(例えば192.168.2.10)を取得します。
ロボットのリモート制御
-
IPCのLANケーブルのもう一端をコントローラのLANポートに差し込みます。
-
IPCのIPアドレスを設定 します。
IPCのIPアドレスは、ロボットのIPアドレスと同じネットワークセグメントにある必要があります。つまり、両方のIPアドレスのネットワーク部分とサブネットマスクが同じである必要があります。例えば、192.168.100.169/255.255.255.0と192.168.100.170/255.255.255.0は同じネットワークセグメントにあります。 -
IPCで TMflow 2 ソフトウェアをダウンロードし、インストールします。
-
TMflowを起動してから下図のように設定を行い、使用可能ロボットの情報が表示されるまで待ちます。ここではSimulator(TM5X-700)を例として説明します。

-
右上の
 アイコンをクリックします。ログイン画面で、アカウントとパスワード(デフォルトではアカウントがAdministrator、パスワードはない)を入力して OK をクリックします。
アイコンをクリックします。ログイン画面で、アカウントとパスワード(デフォルトではアカウントがAdministrator、パスワードはない)を入力して OK をクリックします。
-
正常にロボット制御権を取得した時、制御状態は 解除権限 と表示されます。

「ロボット通信設定」を実行
-
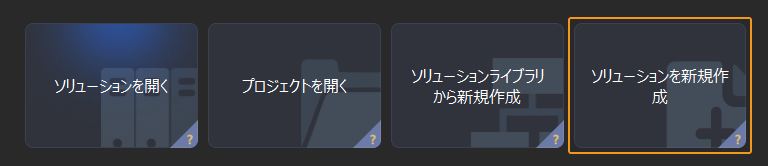
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
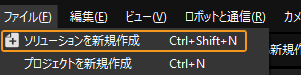
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
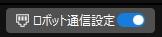
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 ドロップダウンリストから 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
ポート番号は50000または50000以上に設定することを推奨します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
ロボット読み込みの説明 の下で、プログラムフォルダを開く をクリックします。
その後、読み込みファイルはこのフォルダからコピーされますので、フォルダウィンドウを閉じないようにしてください。 -
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-

-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
標準インターフェースのプログラムの読み込み
-
USBメモリをIPCのUSBポートに挿入します。
-
USBの名前をTMROBOTに変更します。変更しないと、USBメモリをコントローラに使用できません。
-
開いた読み込みプログラムフォルダ(
TM_Plugin_and_Playフォルダ)の中で、TMFlow2フォルダに入り、TM_ExportフォルダをUSBメモリにコピーしてから安全に取り外します。読み込みプログラムフォルダは、Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある
Communication Component/Robot_Interface/Robot_Plugin/TM_Plugin_and_Play/TMFlow2パス内でも見つけることができます。 -
USBメモリをコントローラのUSBポートに挿入します。
-
読み込む前に、ロボット操縦桿の M/A を押し続けて、ロボットを手動モードに切り替えます。すると、MANUAL 表示灯は常時点灯します。ロボットがすでに手動モードになっている場合は、この手順をスキップしてください。


-
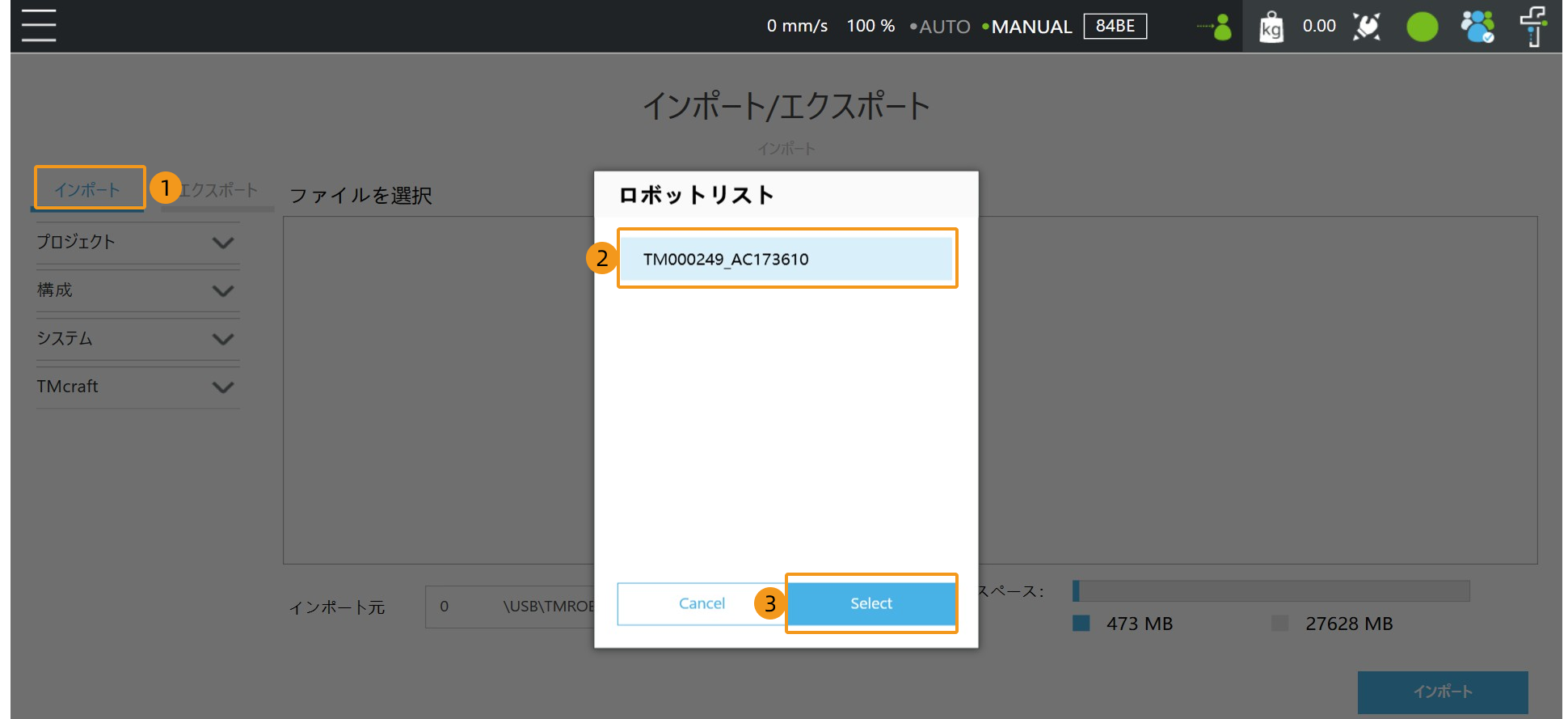
TMflowソフトウェアでは、下図のように設定を行い、インポート/エクスポート画面に入ります。

-
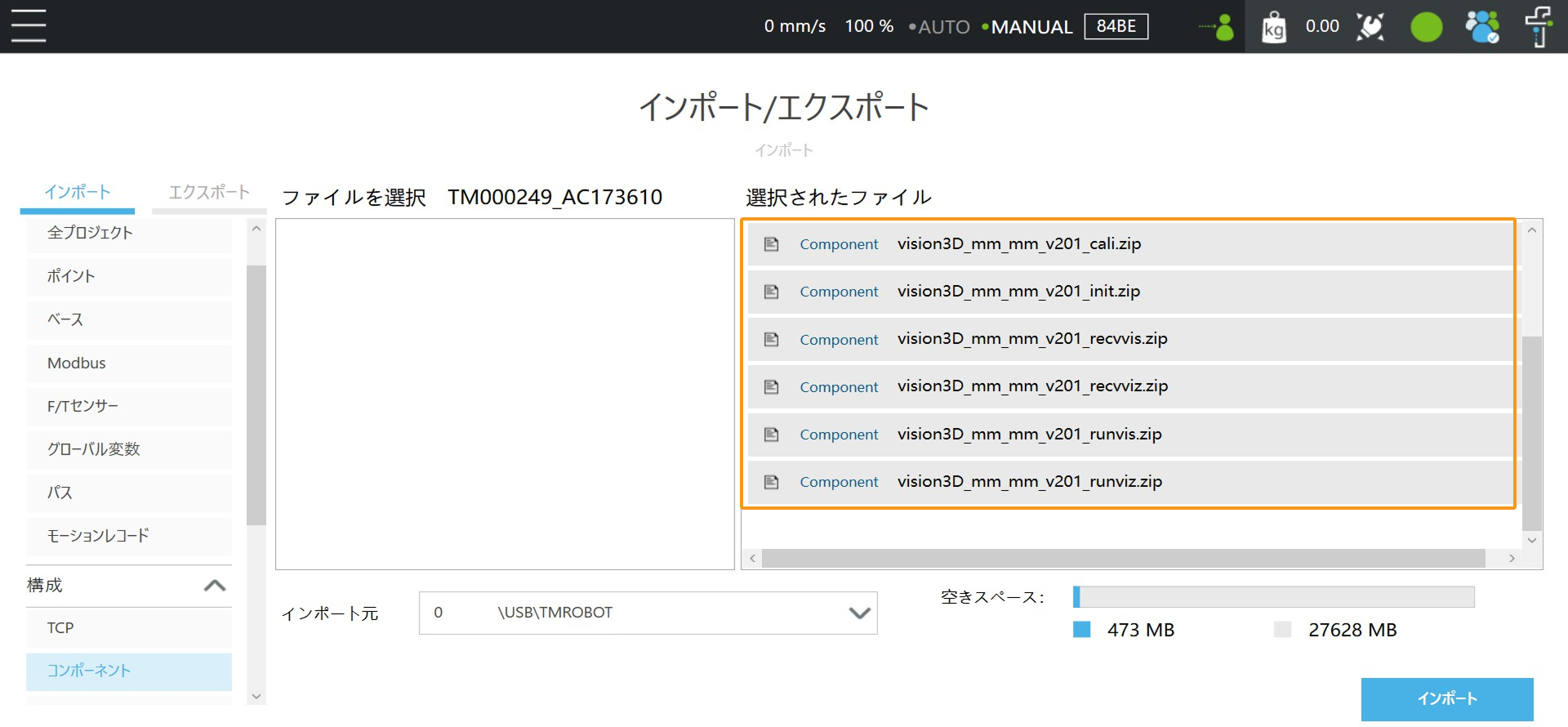
インポート をクリックし、読み込みフォルダ(TM000249_AC173610)を選択してから Select をクリックします。
-
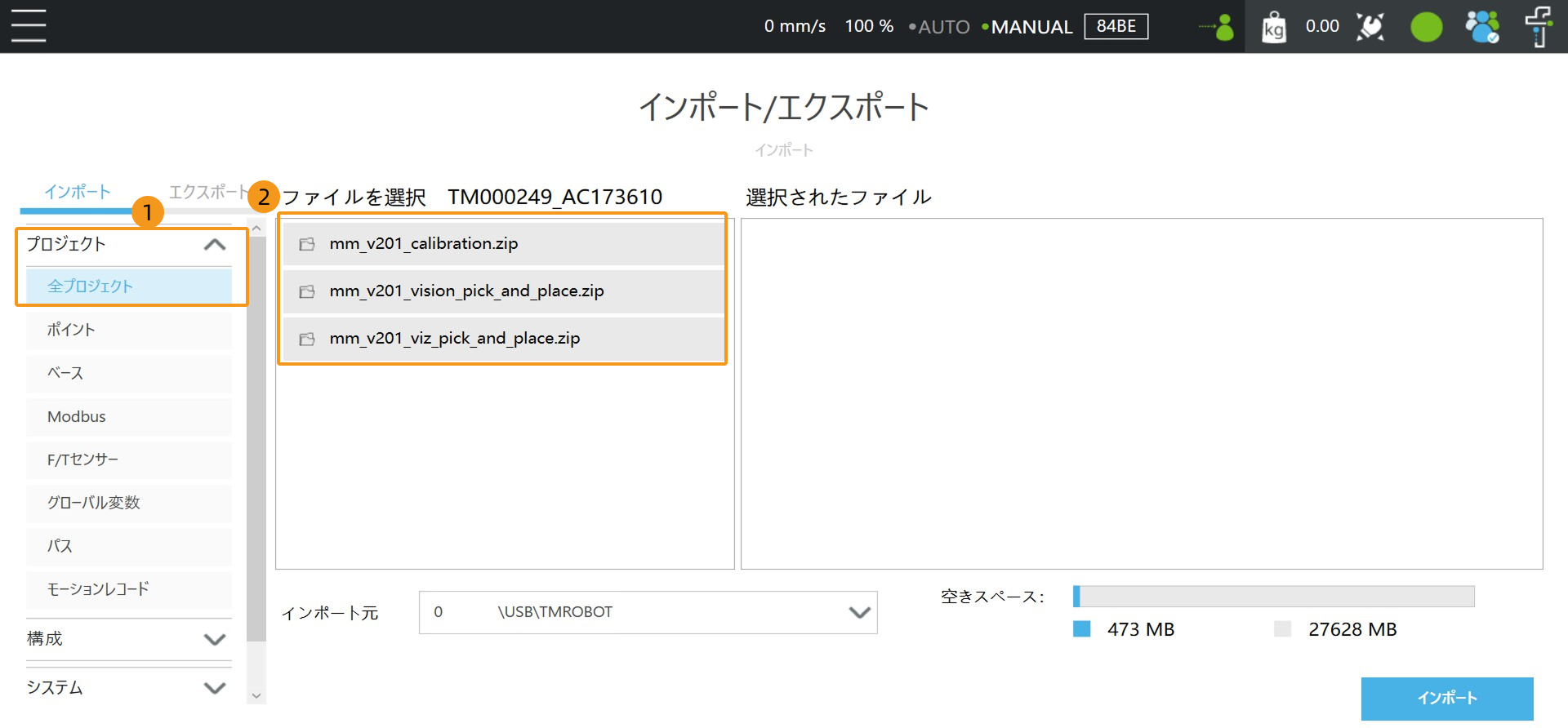
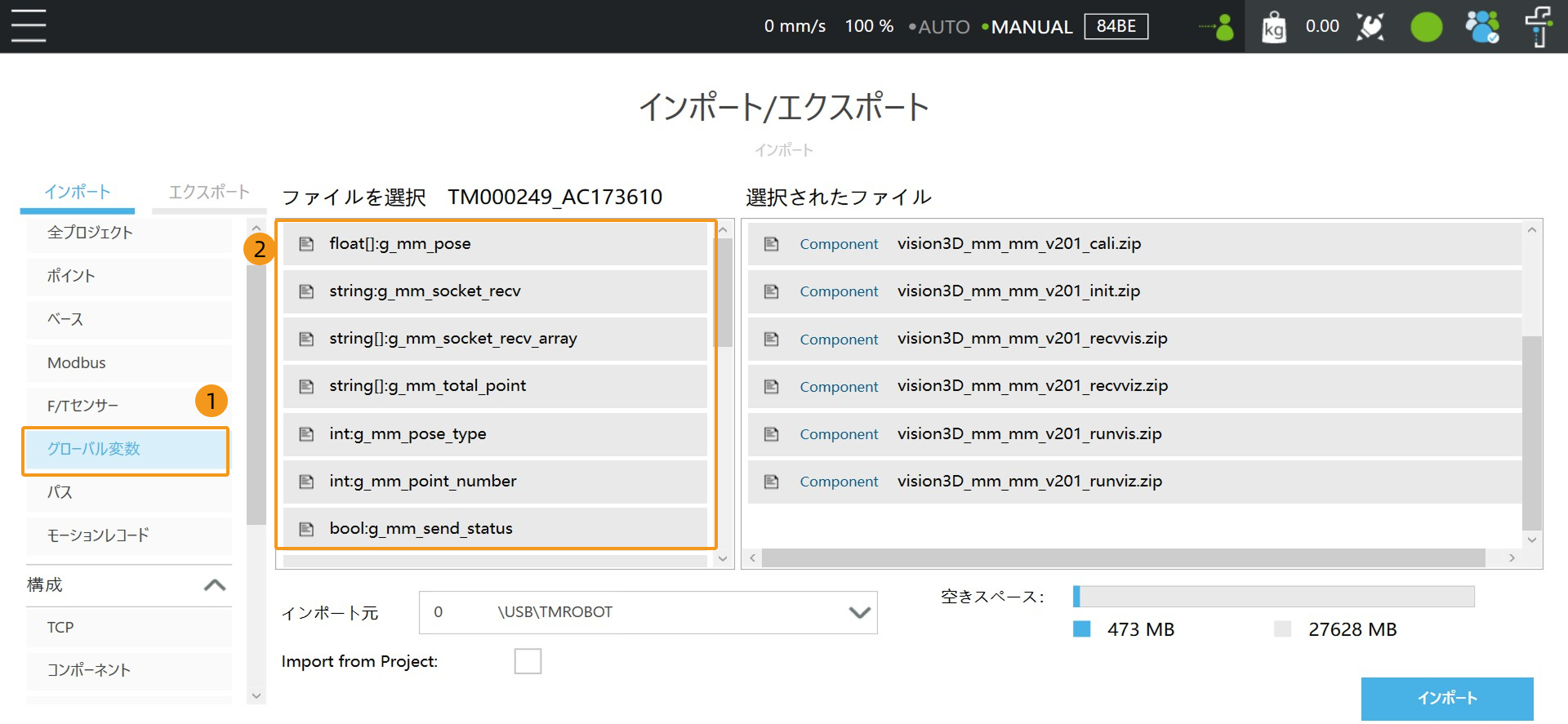
左の をクリックし、ファイルを選択 にあるファイルを全部選択します。するとそれらは 選択されたファイル に移動します。
-
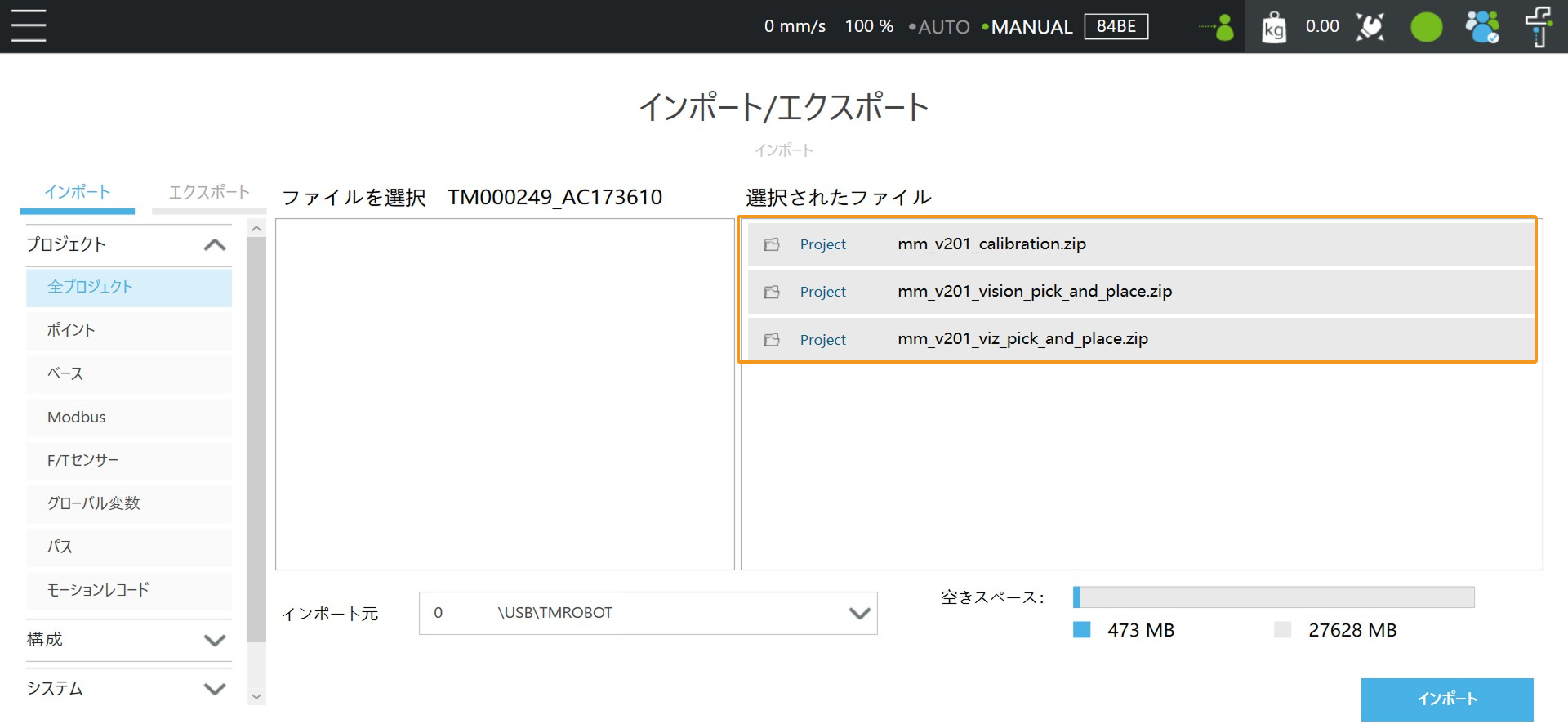
左の をクリックし、ファイルを選択 のファイルを全部選択します。するとそれらは 選択されたファイル に移動します。
-
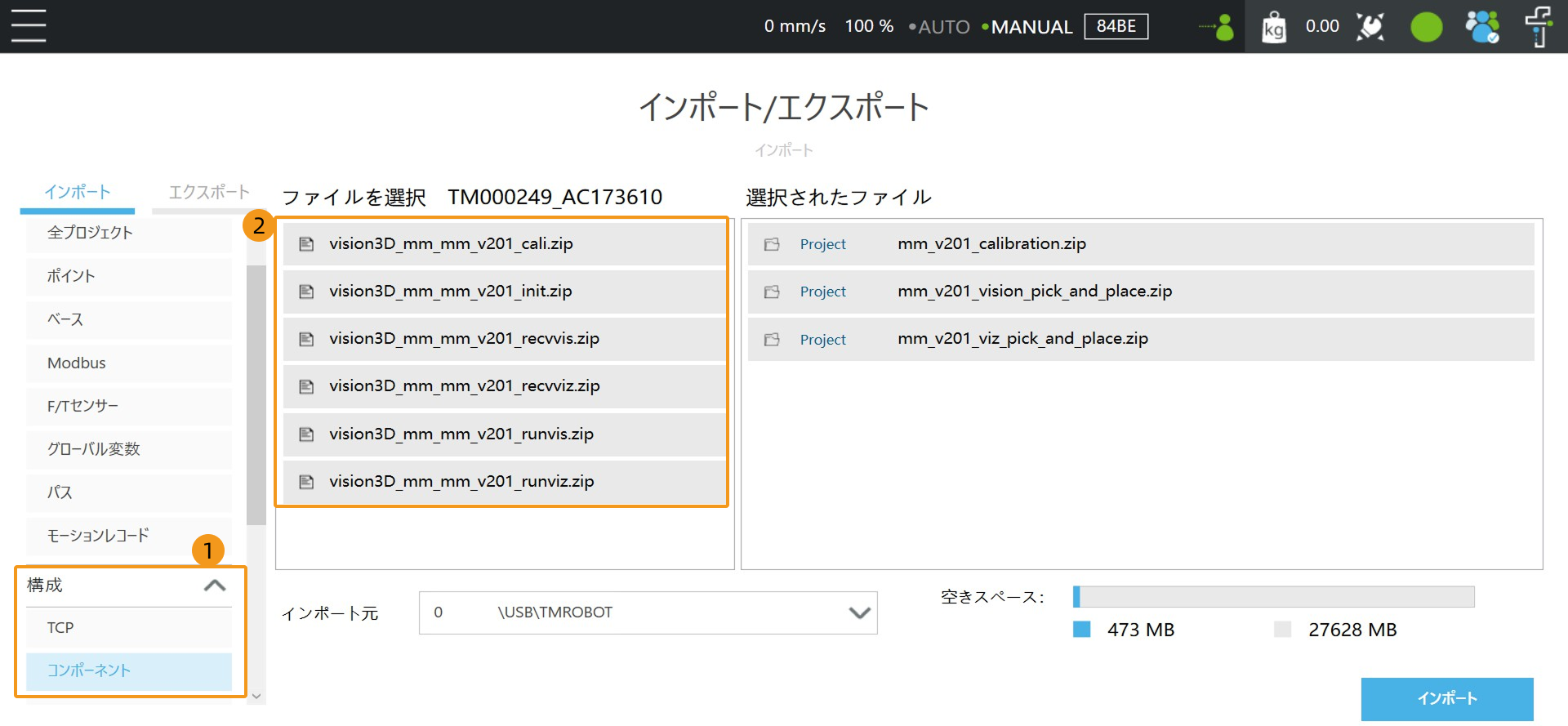
左の をクリックしてから、ファイルを選択 にあるファイルを全部選択します。するとそれらは 選択されたファイル に移動します。
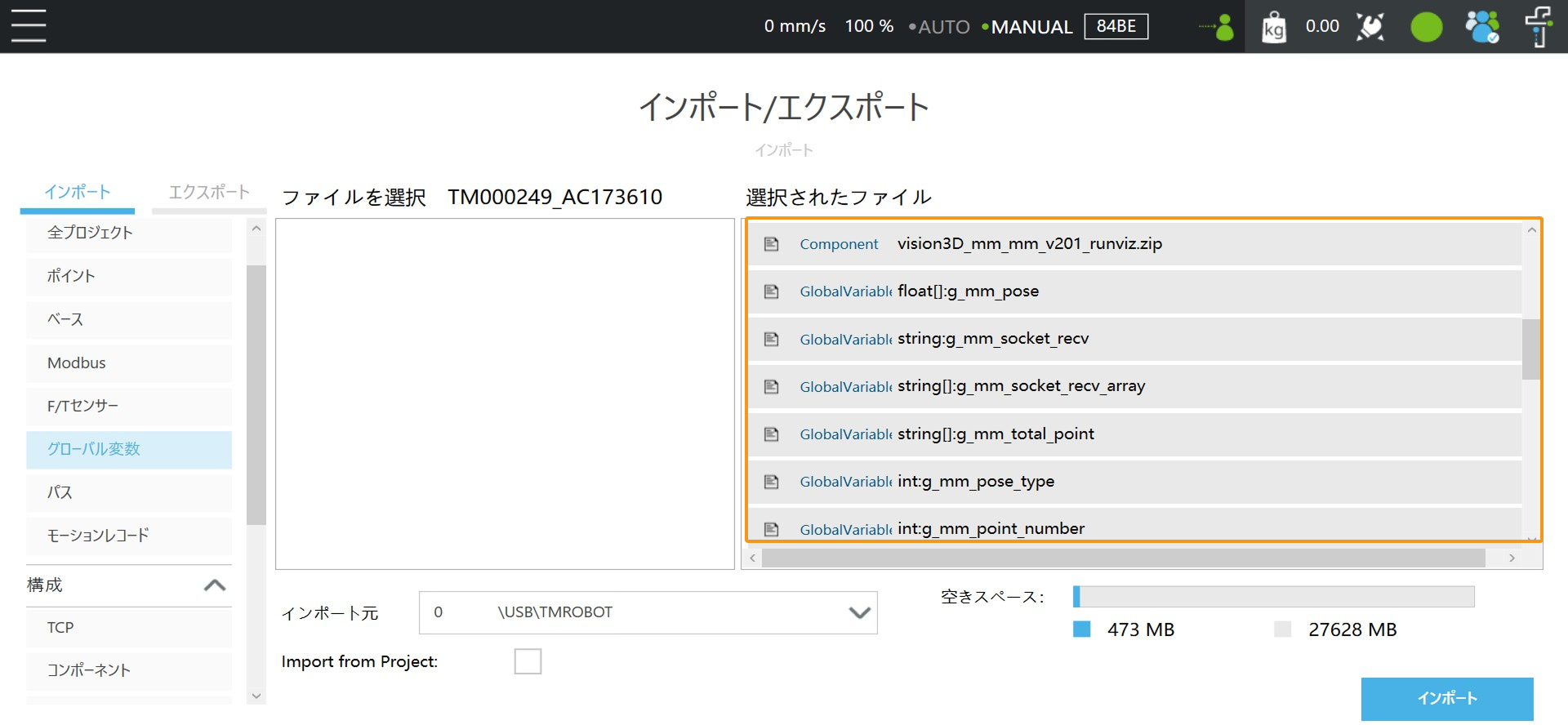
-
右下の インポート をクリックし、表示される画面で OK をクリックします。
-
下図のように設定を行い、コンポネントリスト 画面に入ります。

-
全てのコンポネントの「状態」をオンにして 保存 をクリックします。

-
USBメモリを安全に取り外します。
ロボットの接続状態をテスト
-
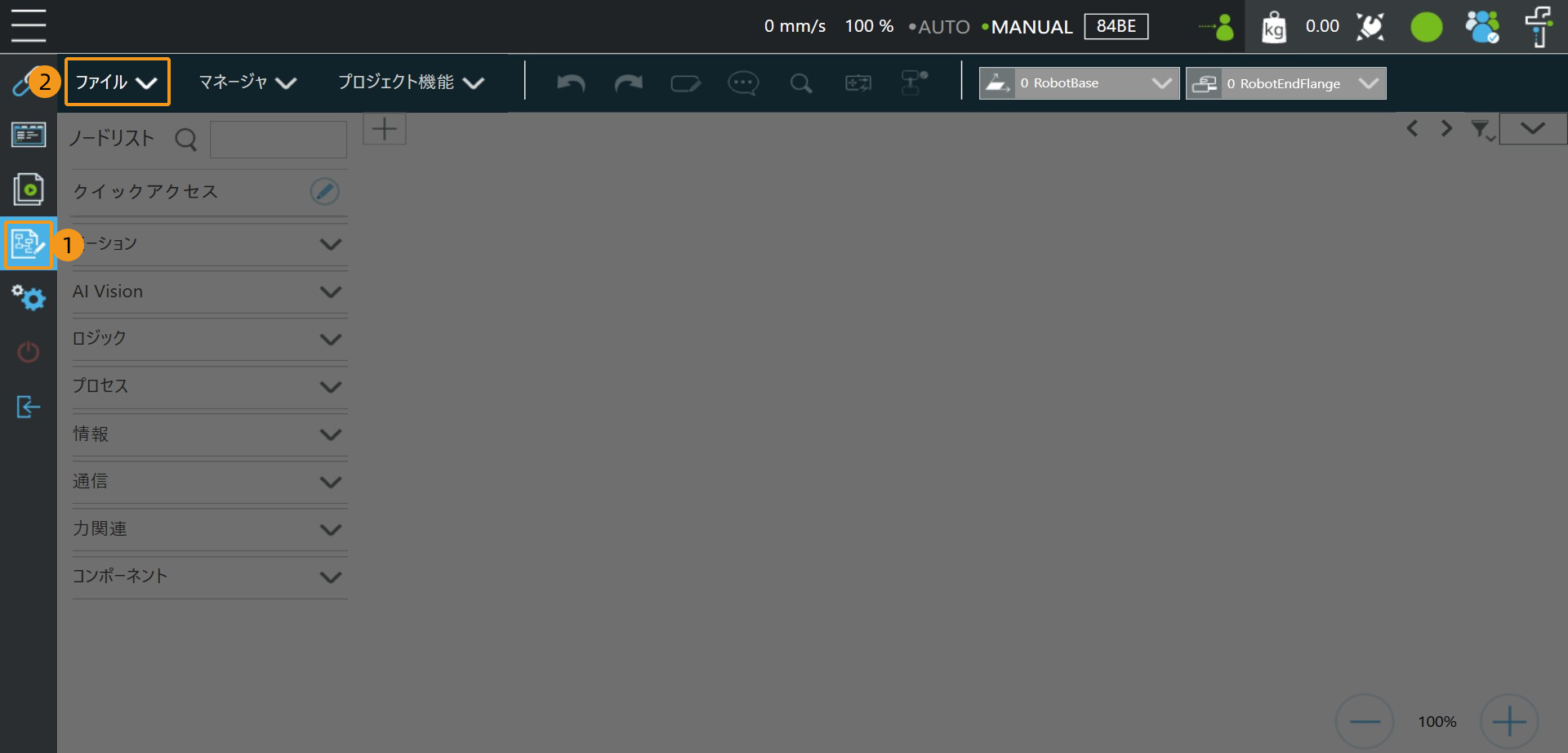
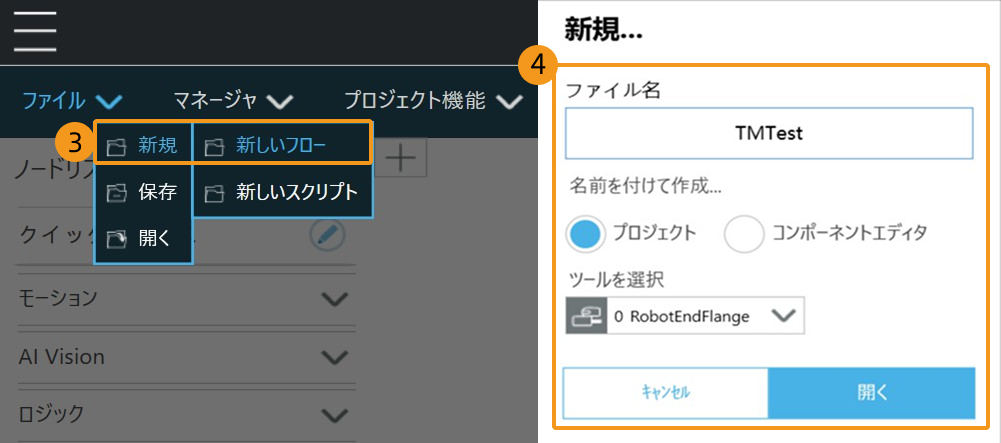
TMflowソフトウェアでは、下図のように設定を行い、ファイルを新規作成します。
-
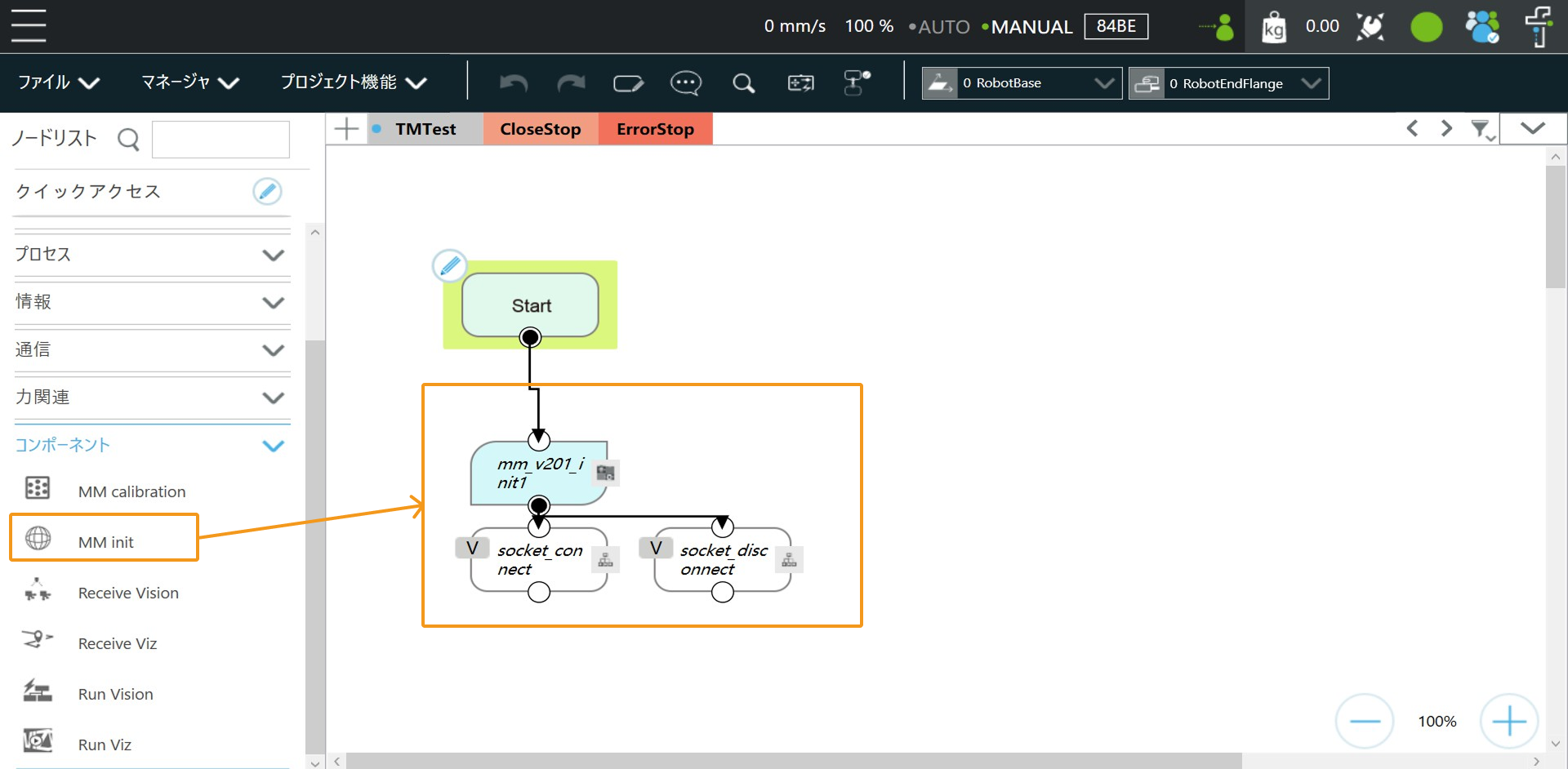
左のコンポネントにある MM init を編集エリアにドラッグします。
-
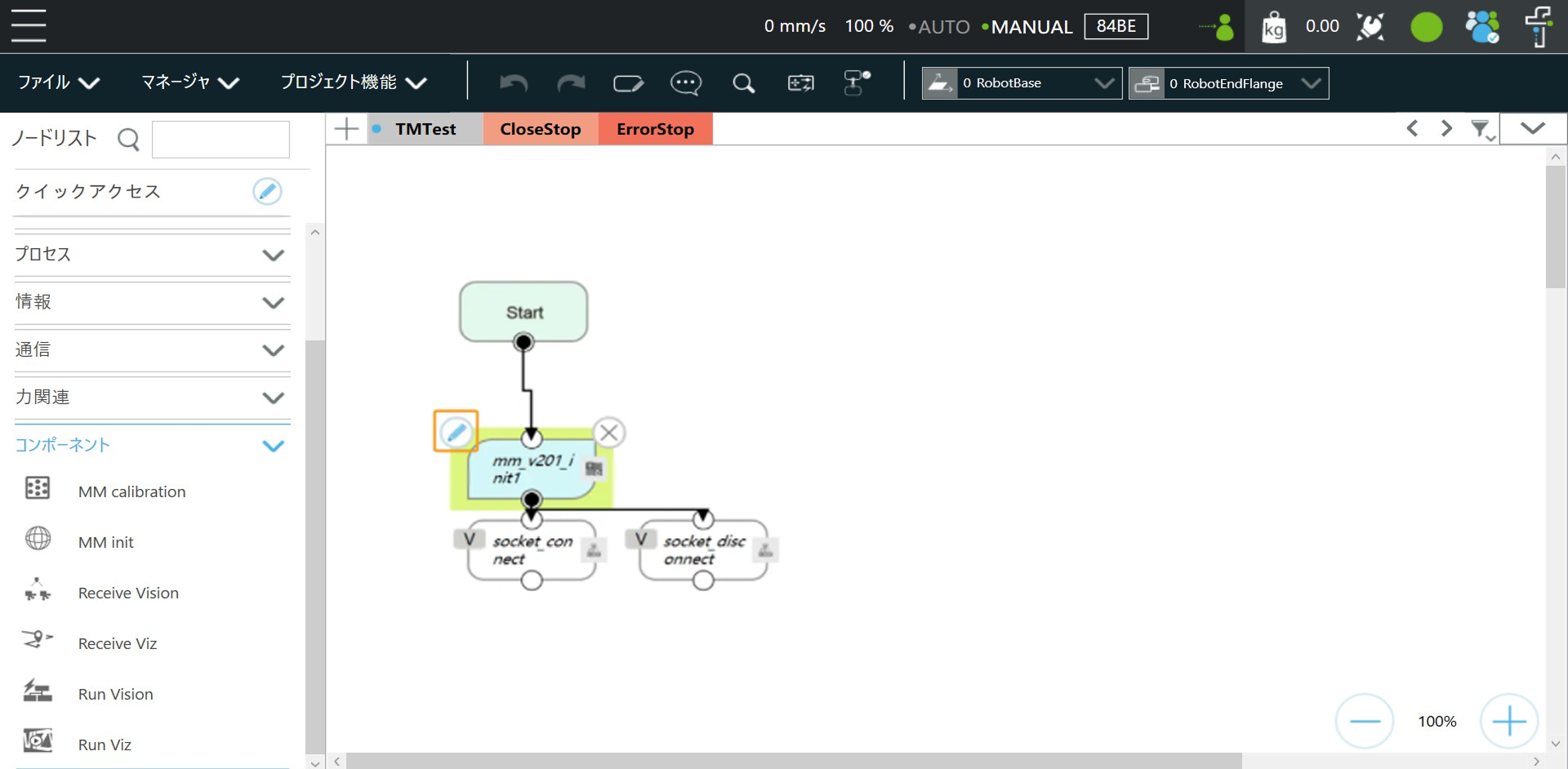
mm_v201_init1 を選択し、左上の編集アイコンをクリックします。
-
send を選択して編集アイコンをクリックします。

-
選択 をクリックします。

-
右上の追加アイコンをクリックします。

-
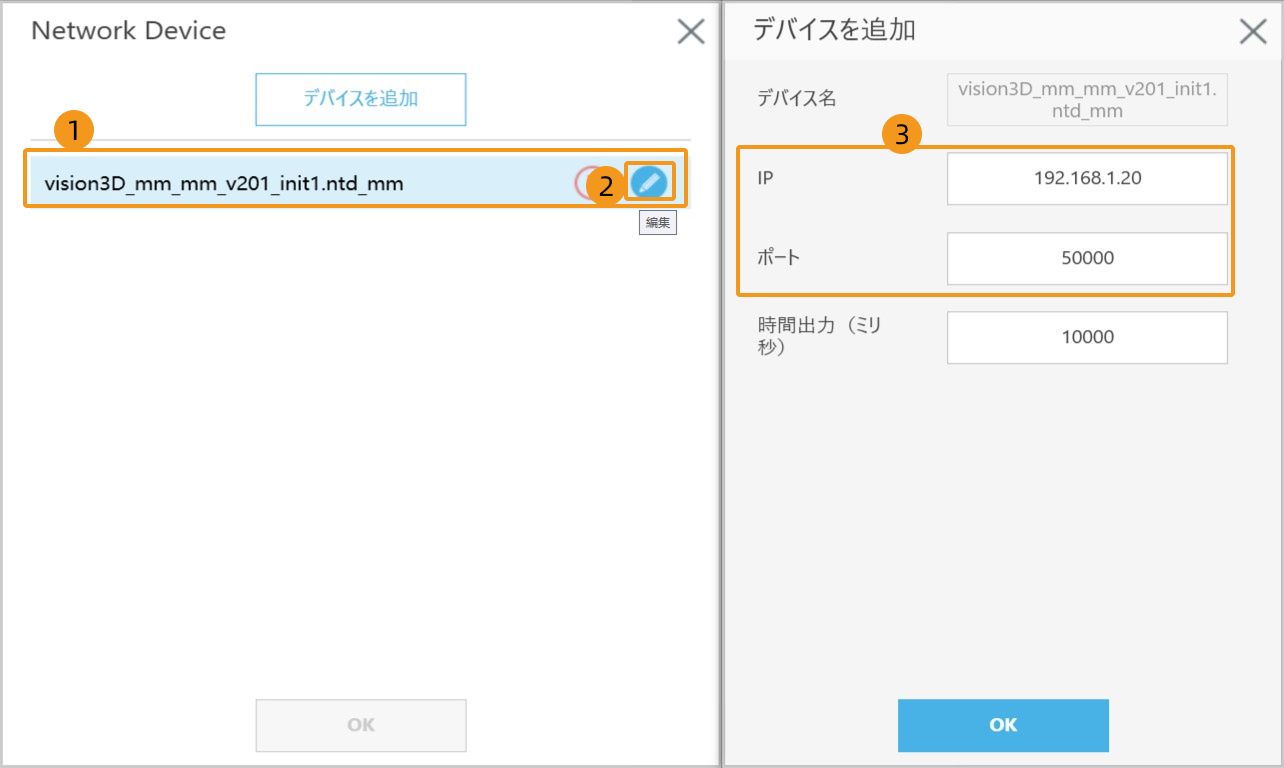
vision3D_mm_mm_v201_init1.ntd_mm を選択し、編集アイコンをクリックして表示されたウィンドウに IP と ポート を入力します。最後に表示されたウィンドウで OK をクリックします。
-
IP にIPCのIPアドレスを入力してください。
-
ポート にMech-Visionで設定したホストポート番号を入力してください。
-
-
ロボット操縦桿の 実行 キーを押してプロジェクトを運転します。プロジェクト運転後、ロボット操縦桿の 停止 キーを押します。

-
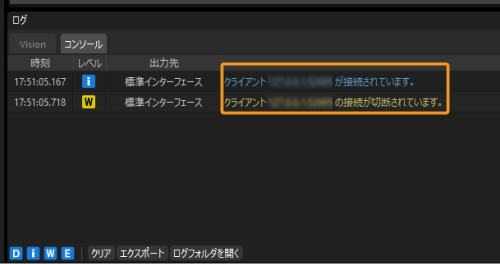
正常に接続すると、Mech-Visionのログの コンソール タブに関連するメッセージが表示されます。