標準インターフェースコマンドの呼び出し順序
以下では、通信先(ロボットまたはPLC)に応じて、標準インターフェースコマンドの呼び出し順序と関係を説明します。
ロボットプログラムによるコマンド呼び出し
作成するプロジェクトによって、ロボットプログラムが呼び出すコマンドは、Mech-Visionプロジェクトに関連するコマンド と Mech-Vizプロジェクトに関連するコマンド の2種類に分けられます。
Mech-Visionプロジェクトに関連するコマンド
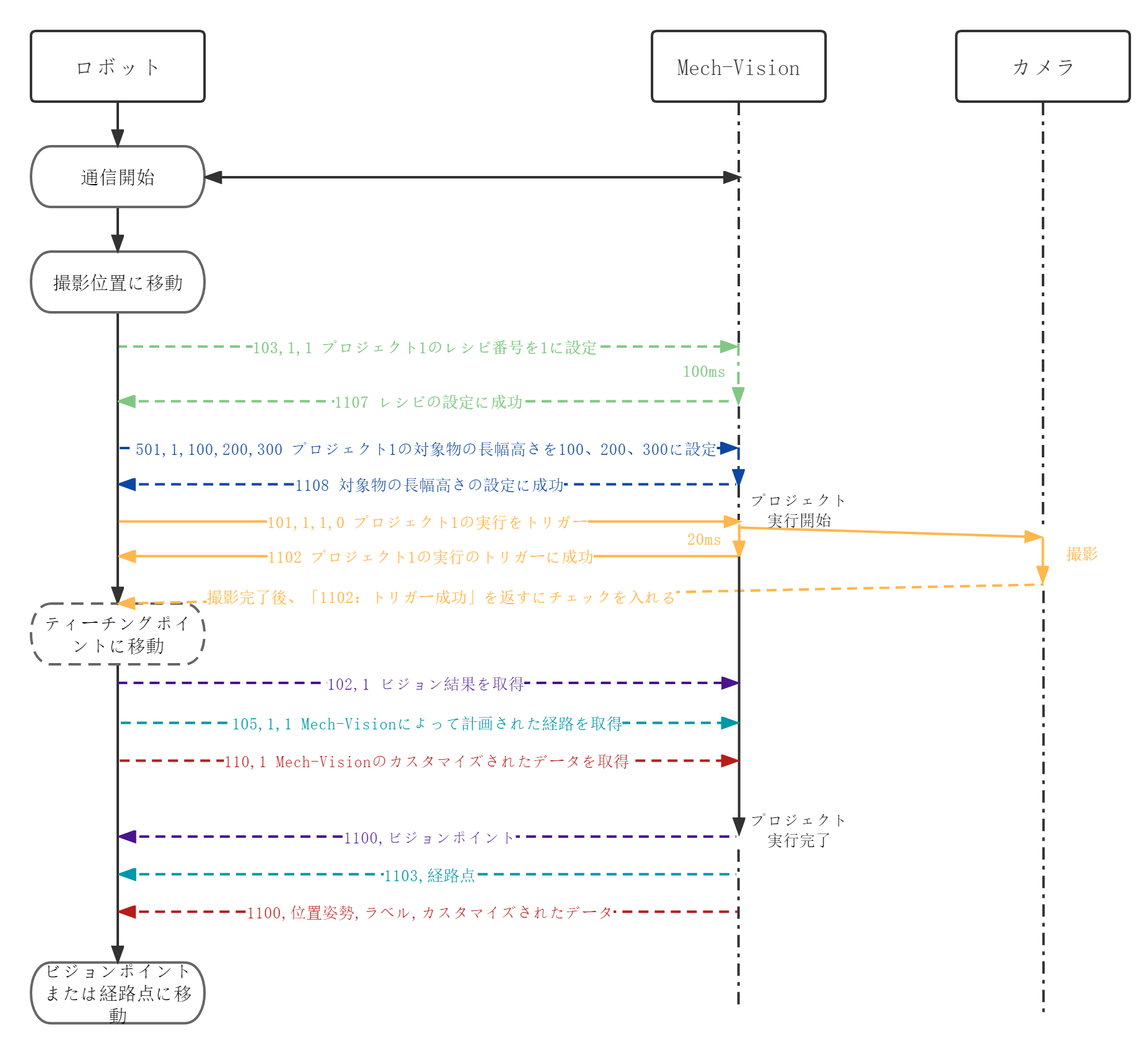
Mech-Visionプロジェクトに関連するコマンドの呼び出し順序は以下の通りです。
-
Mech-Visionプロジェクを実行する(101コマンド)前 に呼び出すコマンド:
-
Mech-Visionパラメータレシピを切り替える(103コマンド)
-
Mech-Visionプロジェクトに対象物の寸法を入力(501コマンド)
-
-
Mech-Visionプロジェクトを実行(101コマンド)
-
Mech-Visionプロジェクトを実行した 後 に呼び出すコマンド:
-
ビジョン結果を取得(102コマンド)
-
Mech-Visionから計画された経路を取得(105コマンド)
-
Mech-Visionからカスタマイズされたデータを取得(110コマンド)
102、105、110コマンドは同時に使用できません。
-
Mech-Visionプロジェクトで一般的に使用されるコマンド呼び出しフローを下図に示します。点線はオプションコマンド(実際のプロジェクトに応じて呼び出すかどうかを選択)、実線は必ず呼び出す必要のあるコマンドを示しています。
Mech-Vizプロジェクトに関連するコマンド
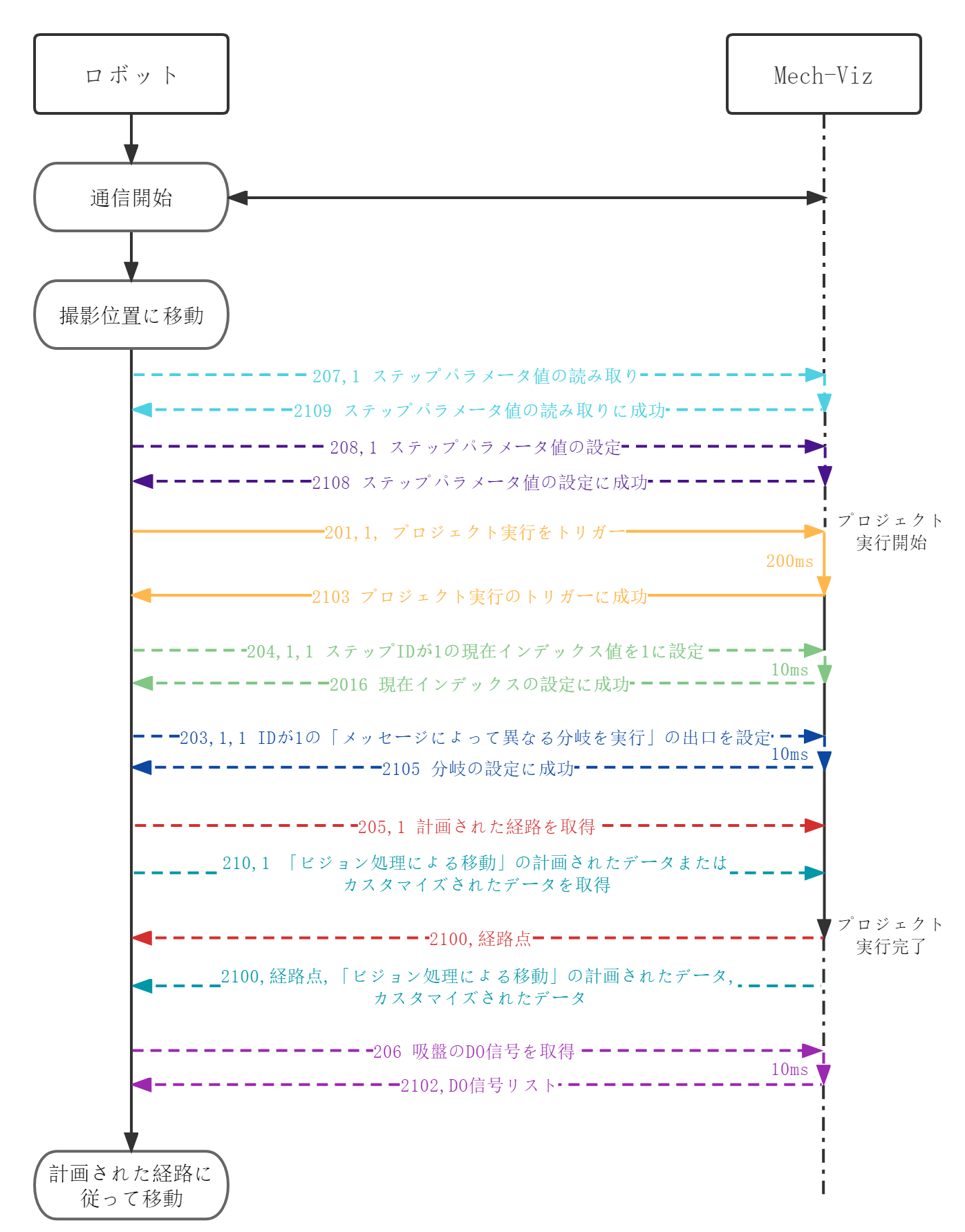
Mech-Vizプロジェクトに関連するコマンドの呼び出し順序は以下の通りです。
-
Mech-Vizプロジェクトを実行する(201コマンド) 前 に呼び出すコマンド:
-
Mech-Vizのステップパラメータを読み取る(207コマンド)
-
Mech-Vizのステップパラメータを設定(208コマンド)
-
-
Mech-Vizプロジェクトを実行(201コマンド)
-
Mech-Vizプロジェクトの 実行中 に呼び出しコマンド:
-
Mech-Vizの現在のインデックスを設定(204コマンド)
-
Mech-Vizの分岐ステップの出口を設定(203コマンド)
-
Mech-Vizから計画された経路を取得(205コマンド)
-
Mech-Vizから「ビジョン処理による移動」の計画結果またはカスタマイズされたデータを取得(210コマンド)
-
204および203コマンドは、205と210コマンドの前に呼び出す必要があります。
-
205および210コマンドは同時に使用できません。
-
-
Mech-Vizプロジェクトの 実行後 に呼び出しコマンド:
-
吸盤のDO信号リストを取得(206コマンド)
-
Mech-Vizプロジェクトで一般的に使用されるコマンド呼び出しフローを下図に示します。点線はオプションコマンド(実際のプロジェクトに応じて呼び出すかどうかを選択)、実線は必ず呼び出す必要のあるコマンドを示しています。
PLCプログラムによるコマンド呼び出し
PLCプログラムのコマンド呼び出しフローを下図に示します。
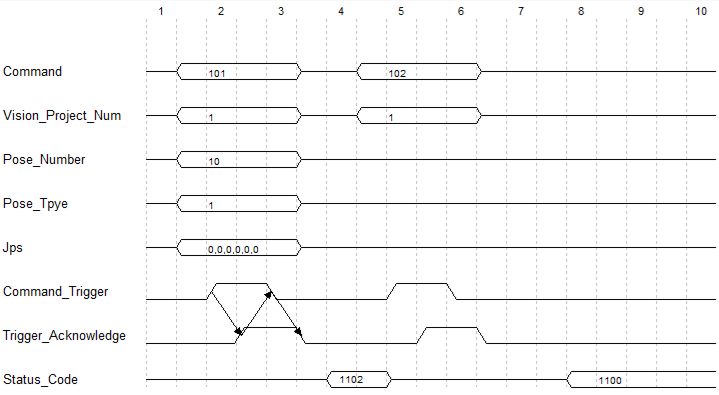
説明:
-
各コマンドの要求に従い、コマンドコードとコマンドパラメータを対応するレジスタに書き込みます。例えば、101はCommandに、1(プロジェクト番号)はVision_Project_Numに書き込まれます。
-
コマンドをトリガーすると、PLCはCommand_Triggerを1に設定し、ビジョンシステムがコマンドコードとコマンドパラメータを読み取ります。
-
ビジョンシステムはCommand_Triggerが1であることを検出すると、Trigger_Acknowledgeを1に設定します。
-
PLCはTrigger_Acknowledgeが1であることを検出すると、Command_Triggerをリセットします。その後、次のコマンドコードとコマンドパラメータを対応するレジスタに書き込みます。
-
ビジョンシステムはCommand_Triggerが0であることを検出すると、Trigger_Acknowledgeを0に設定します。
各コマンドの詳細な呼び出し順序については、Mech-Visionプロジェクトに関連するコマンド および Mech-Vizプロジェクトに関連するコマンドをご参照ください。