自動キャリブレーション
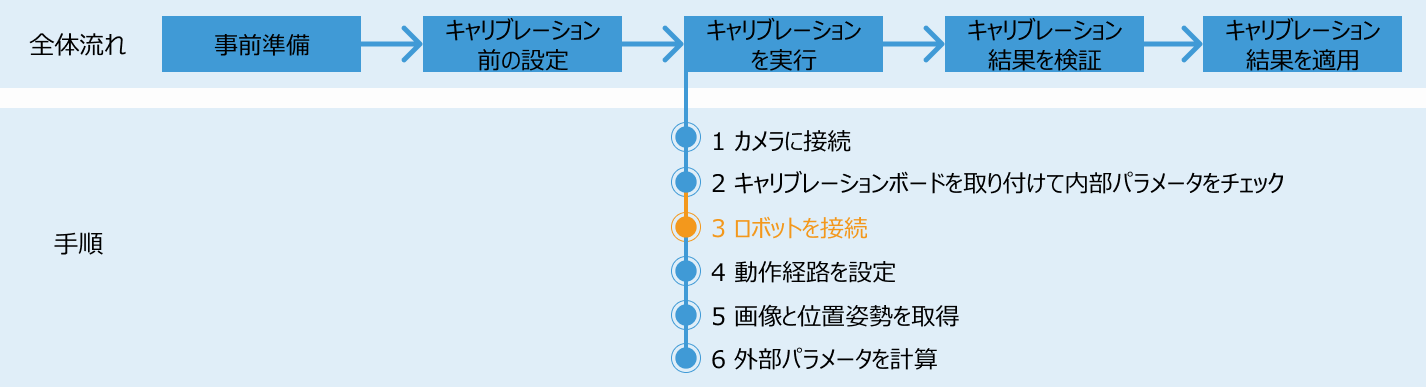
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
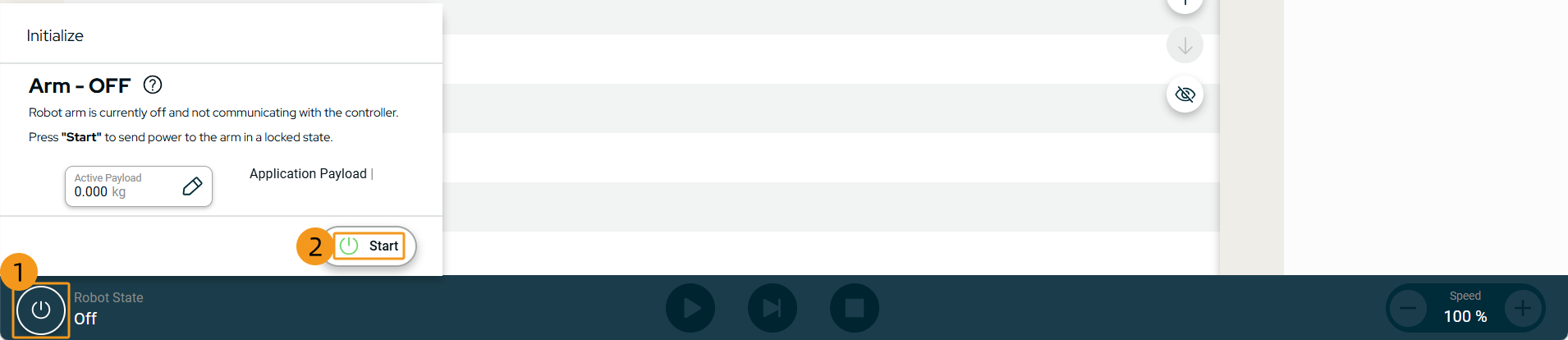
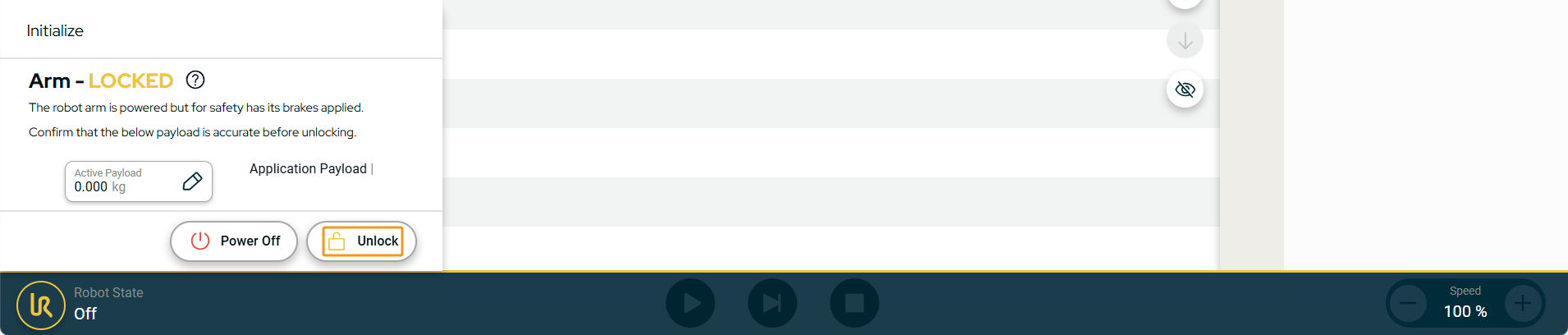
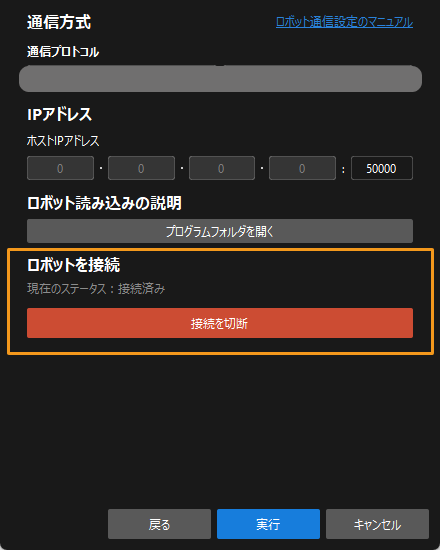
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
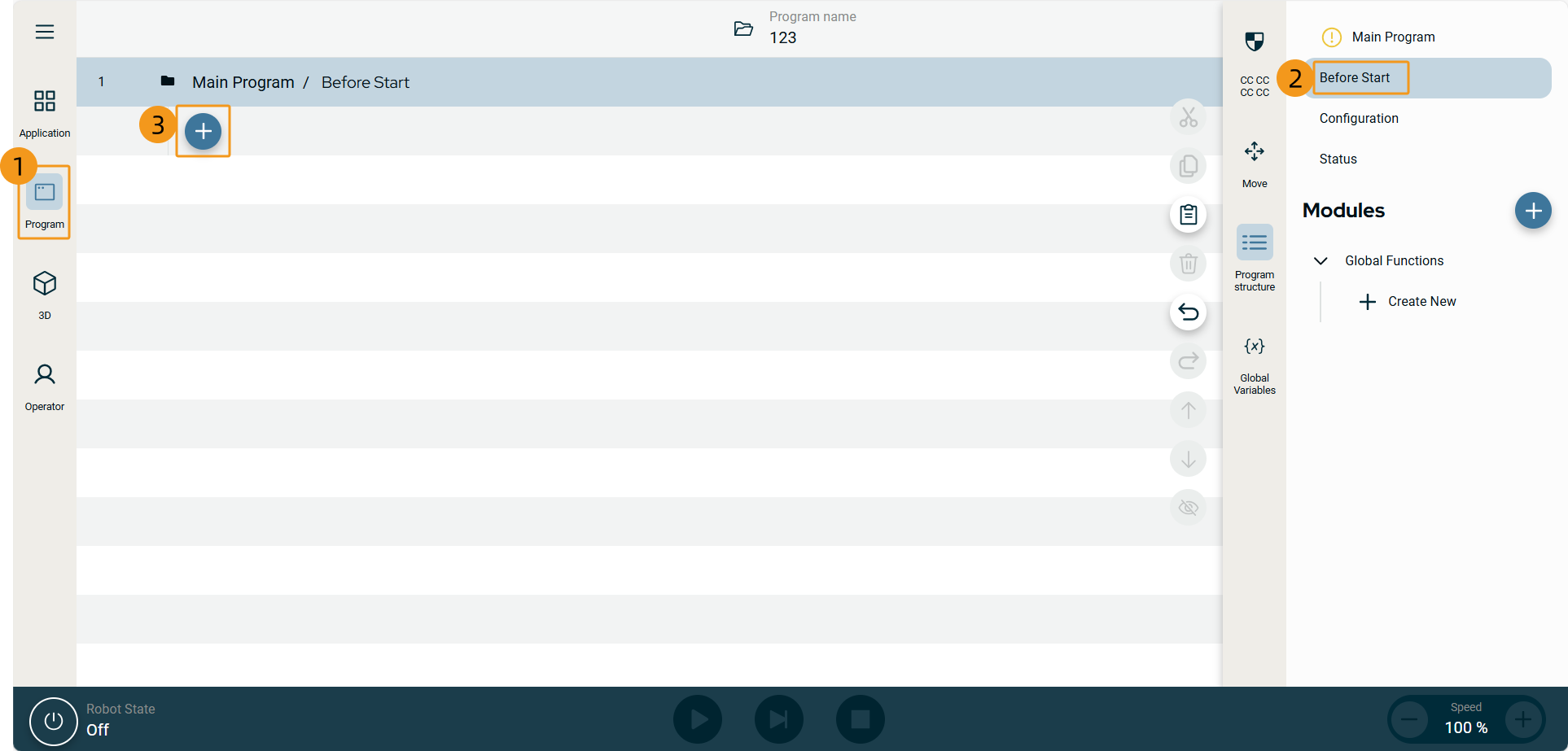
1. キャリブレーションプログラムの作成
-
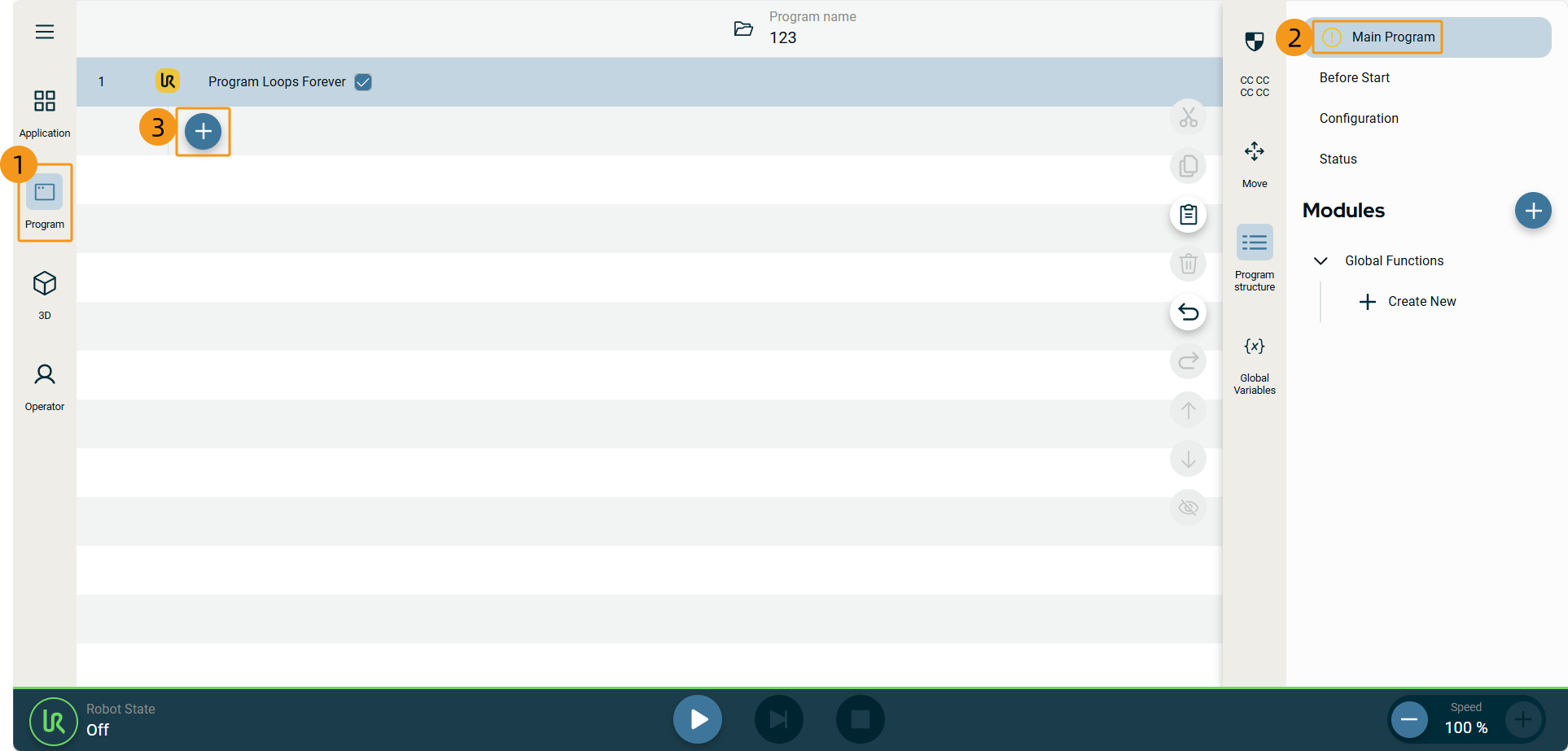
ティーチペンダントで を順にクリックします。
-
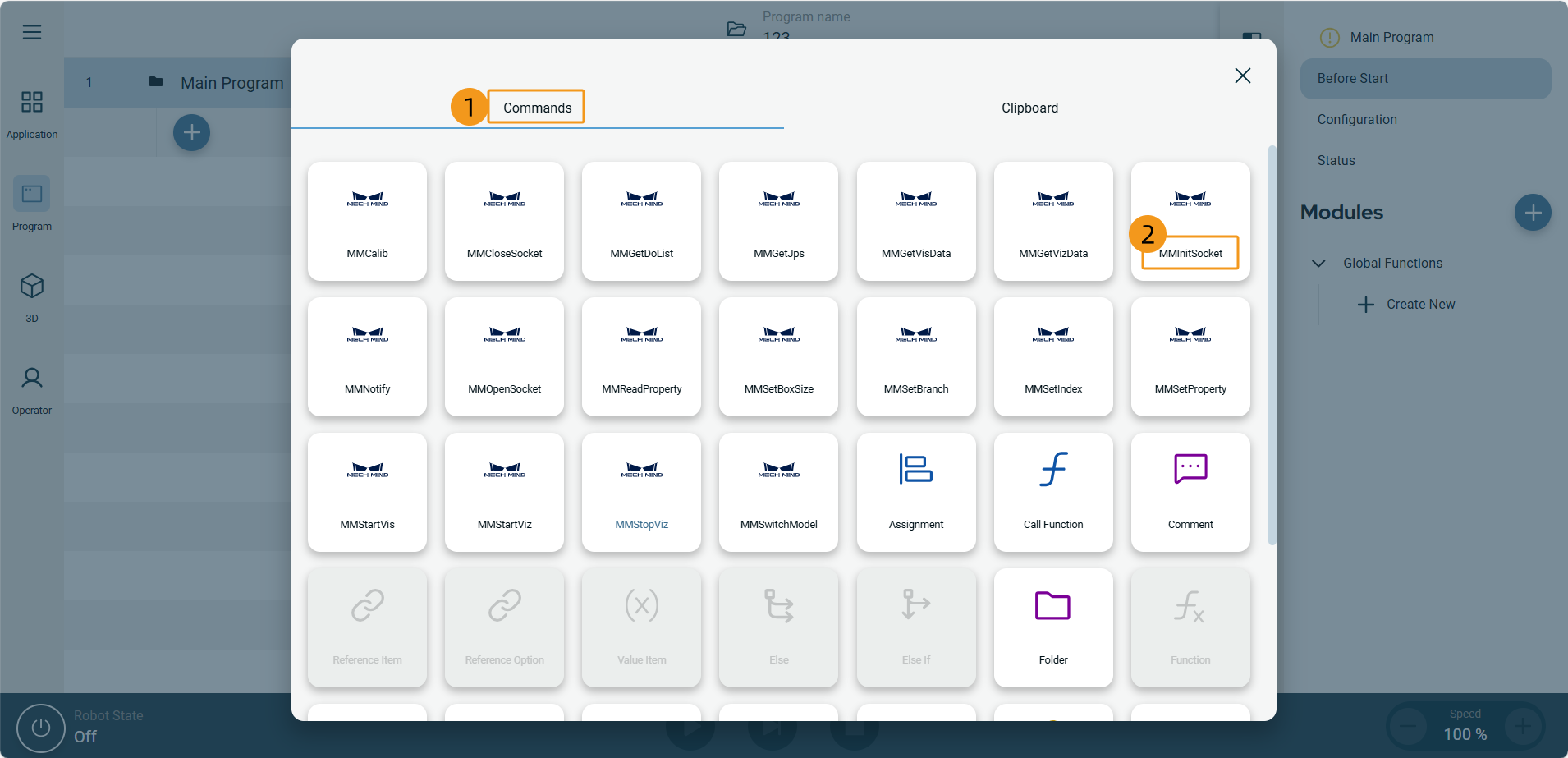
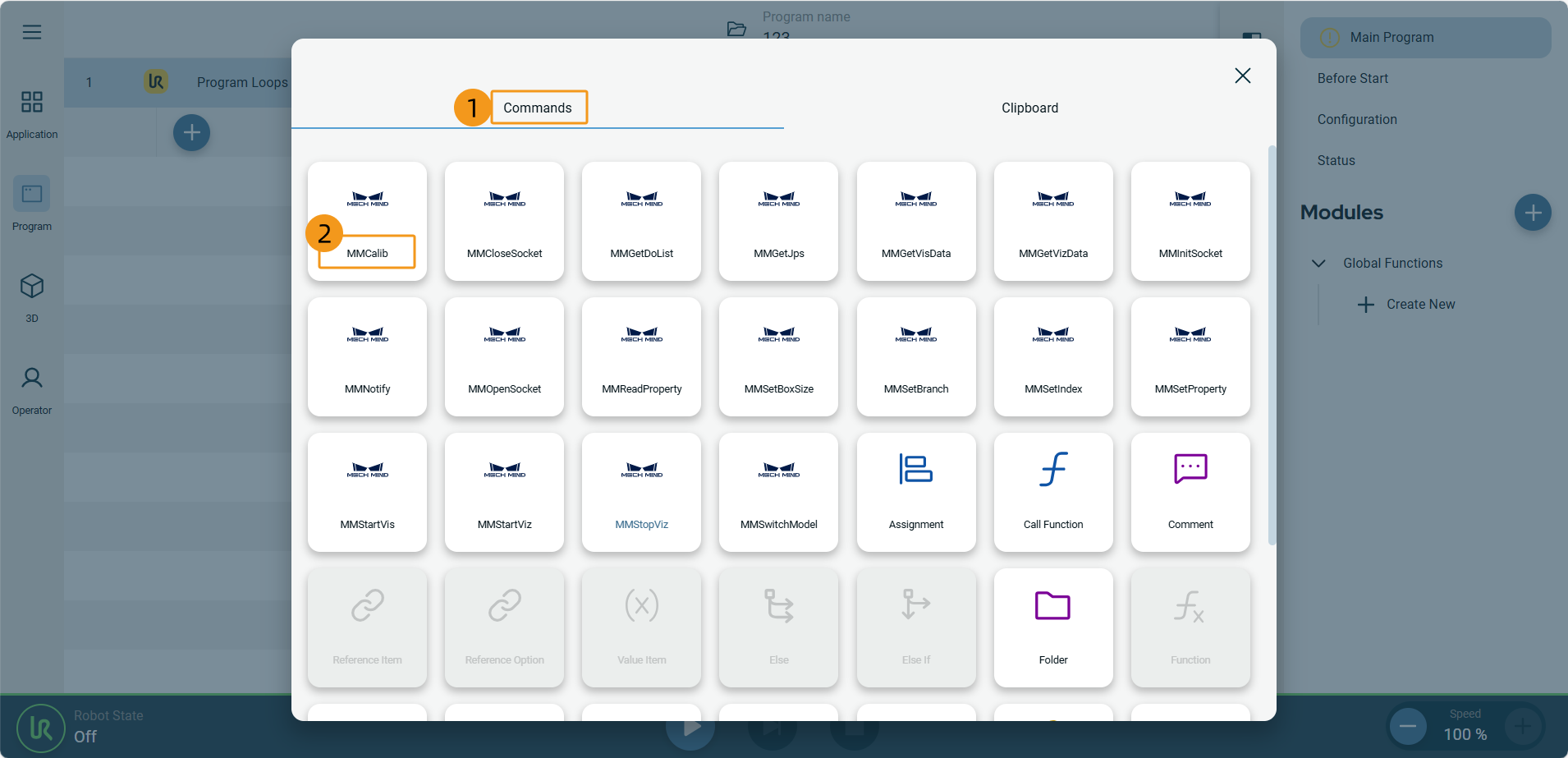
Commands から MMInitSocket を選択します。
-
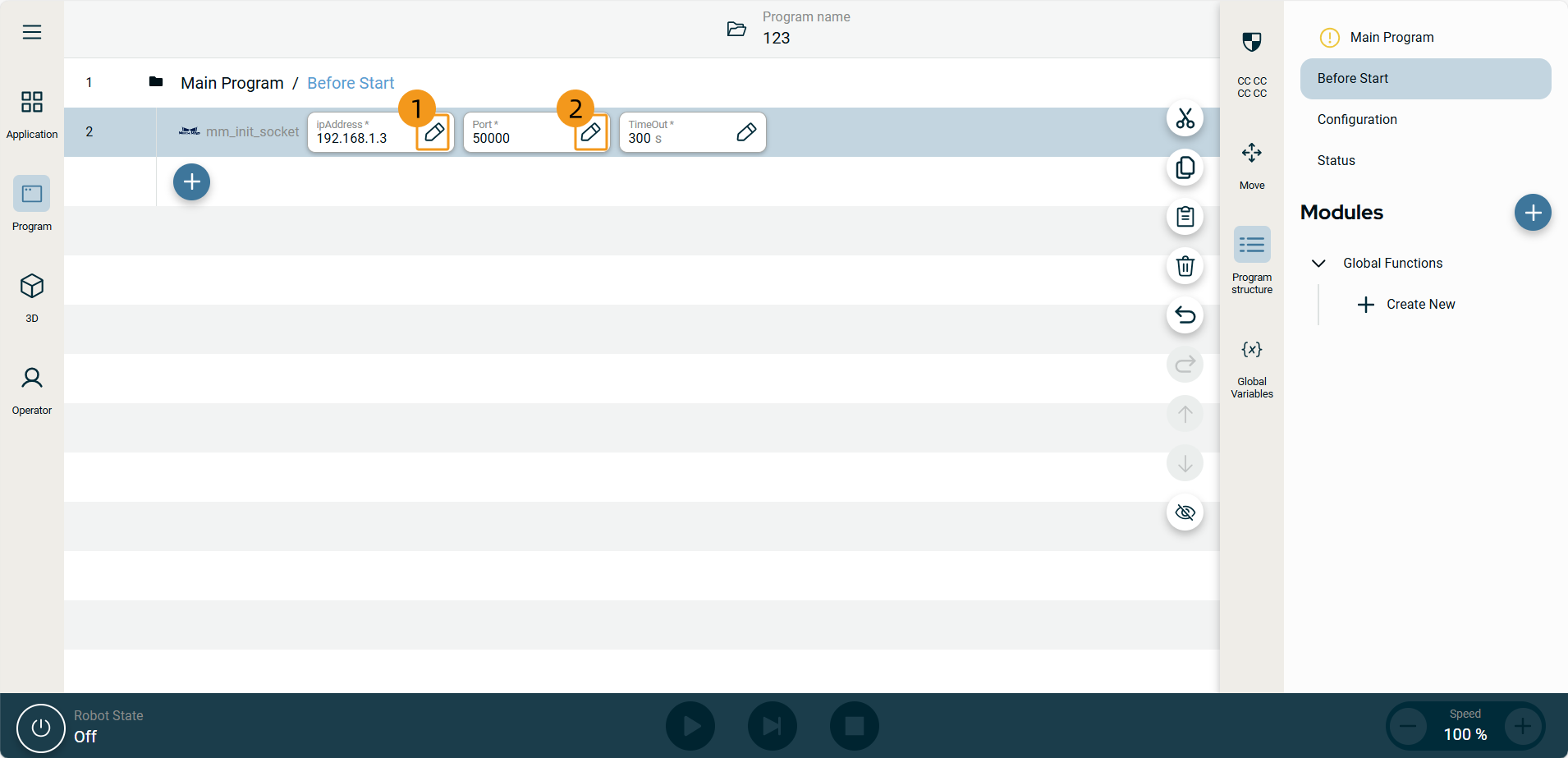
表示された画面で、コマンド内の ipAddress をIPCのIPアドレスに、Port を 50000 に設定します(このポート番号はMech-Visionで設定されたホストポートと一致させる必要があります)。設定完了後、ipAddress と Port の下には設定したIPCのIPアドレスとポート番号が表示されます。
-
ティーチペンダントで を順にクリックします。
-
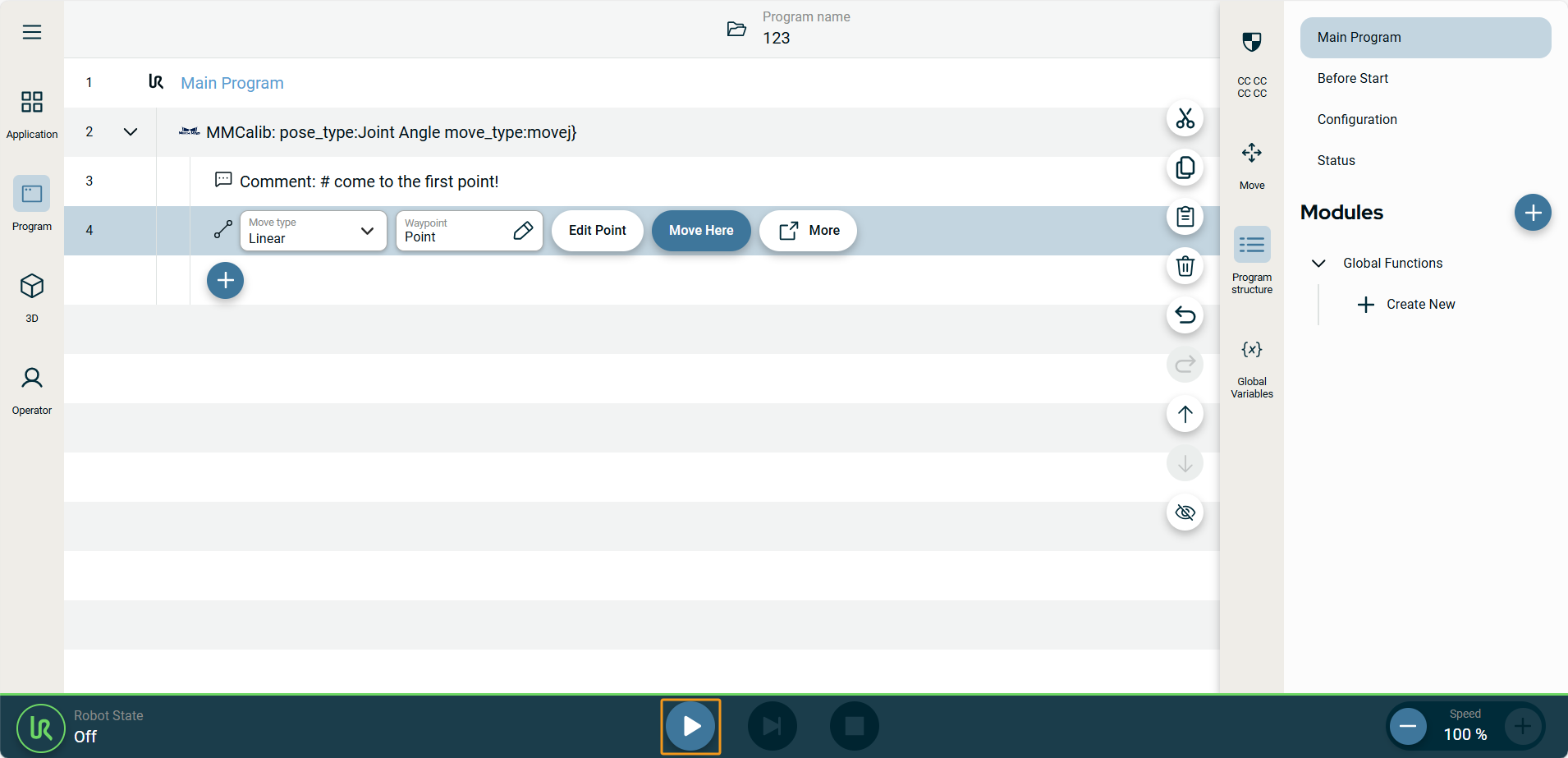
Commands から MMCalib を選択します。
-
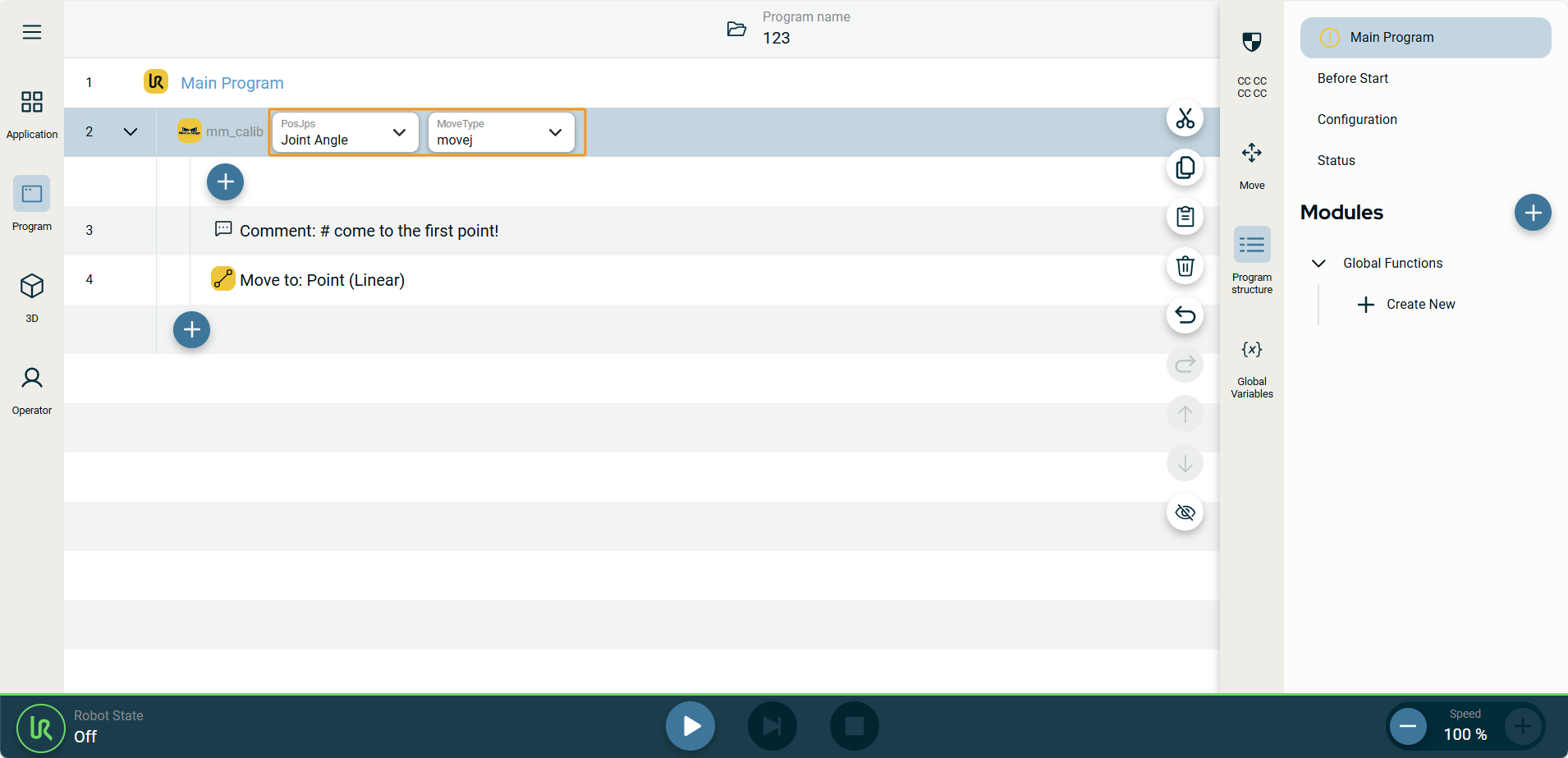
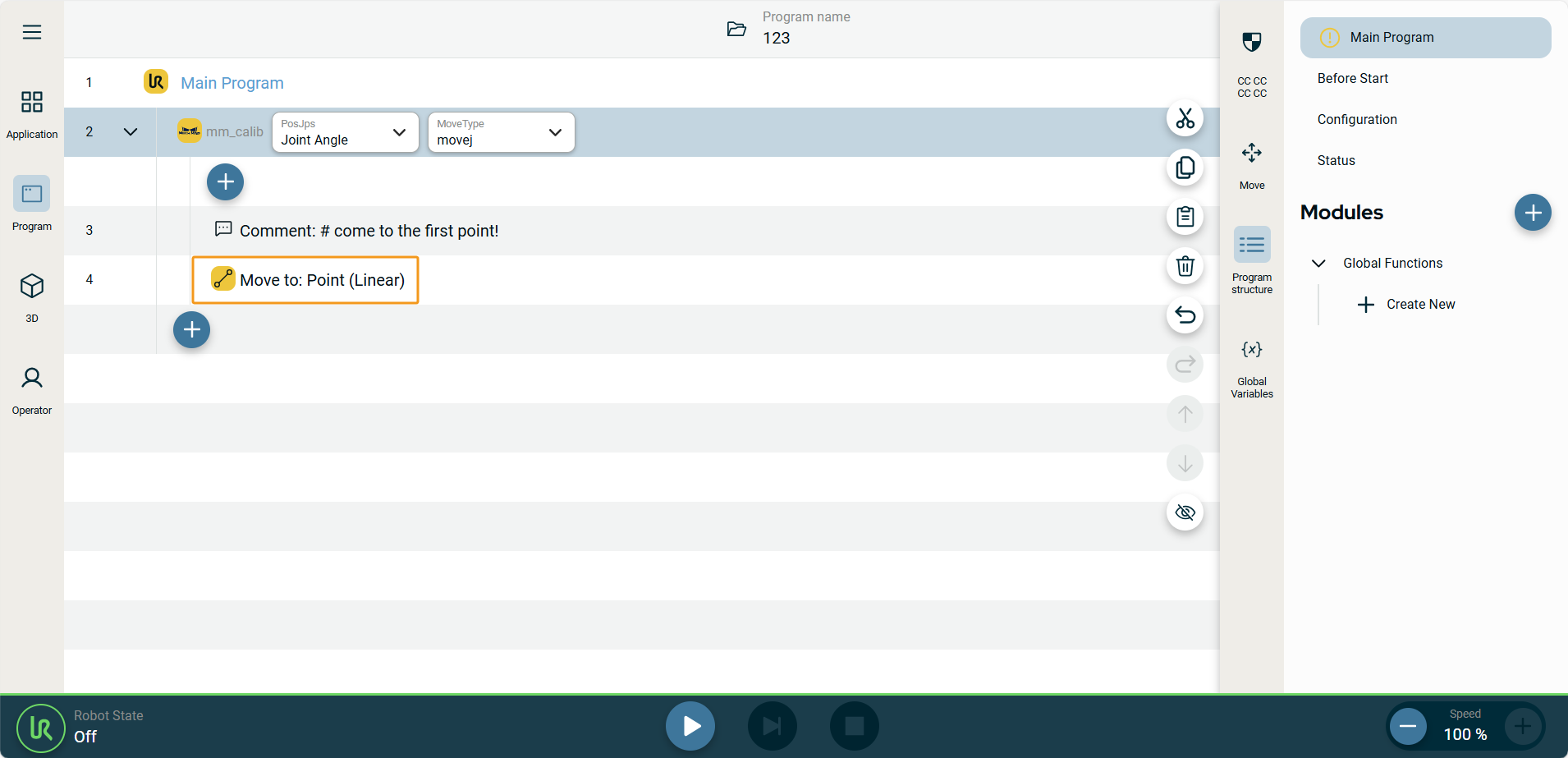
mm_calibコマンドでは、PosJps は Joint Angle(位置姿勢形式は関節角度)を選択し、MoveType は movej(移動方式は関節移動)を選択します。
2.キャリブレーションの初期位置を設定
-
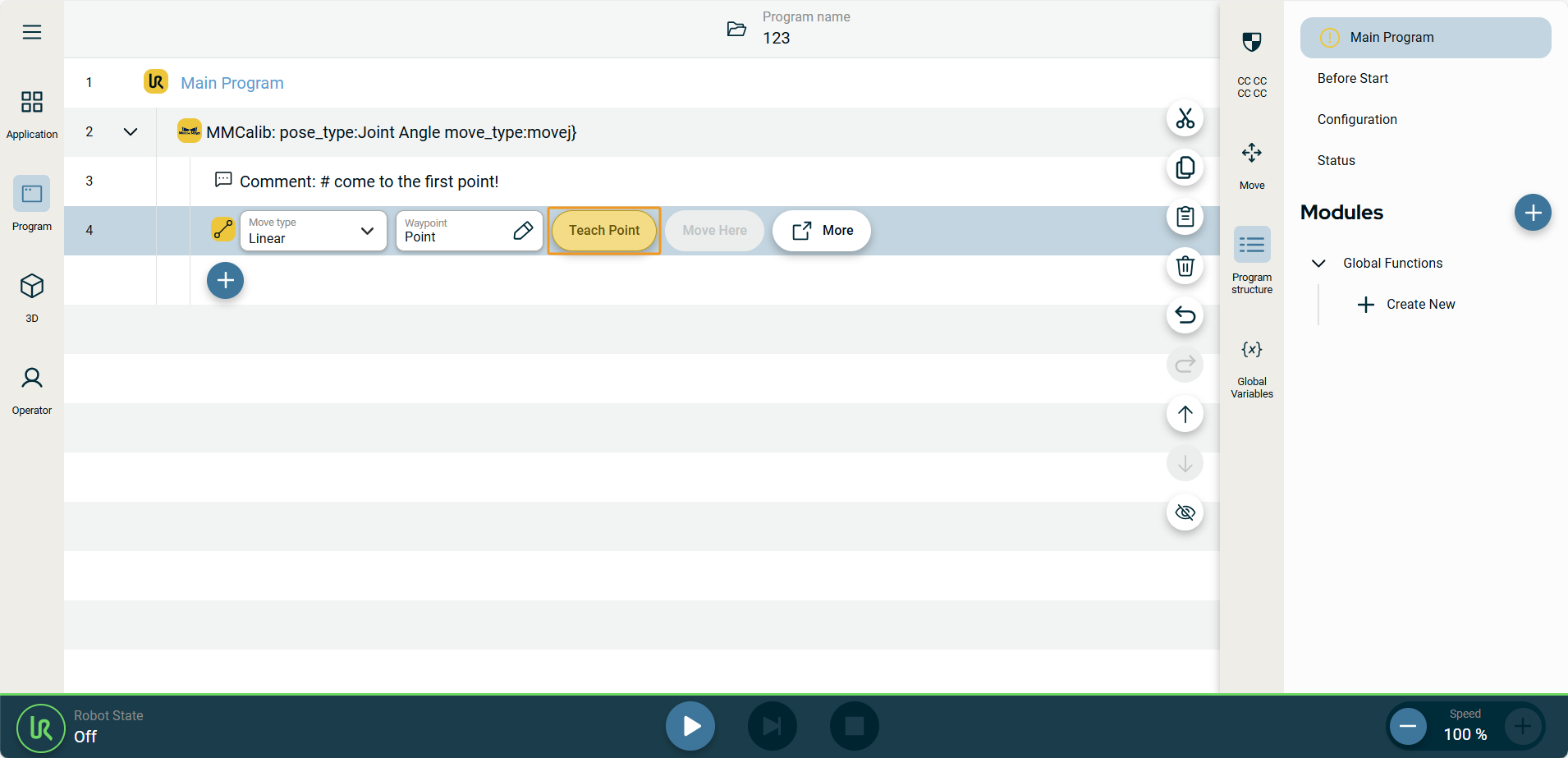
MMCalibコマンドでは、Move to: Point(Linear) をクリックします。
-
Teach Point をクリックします。
-
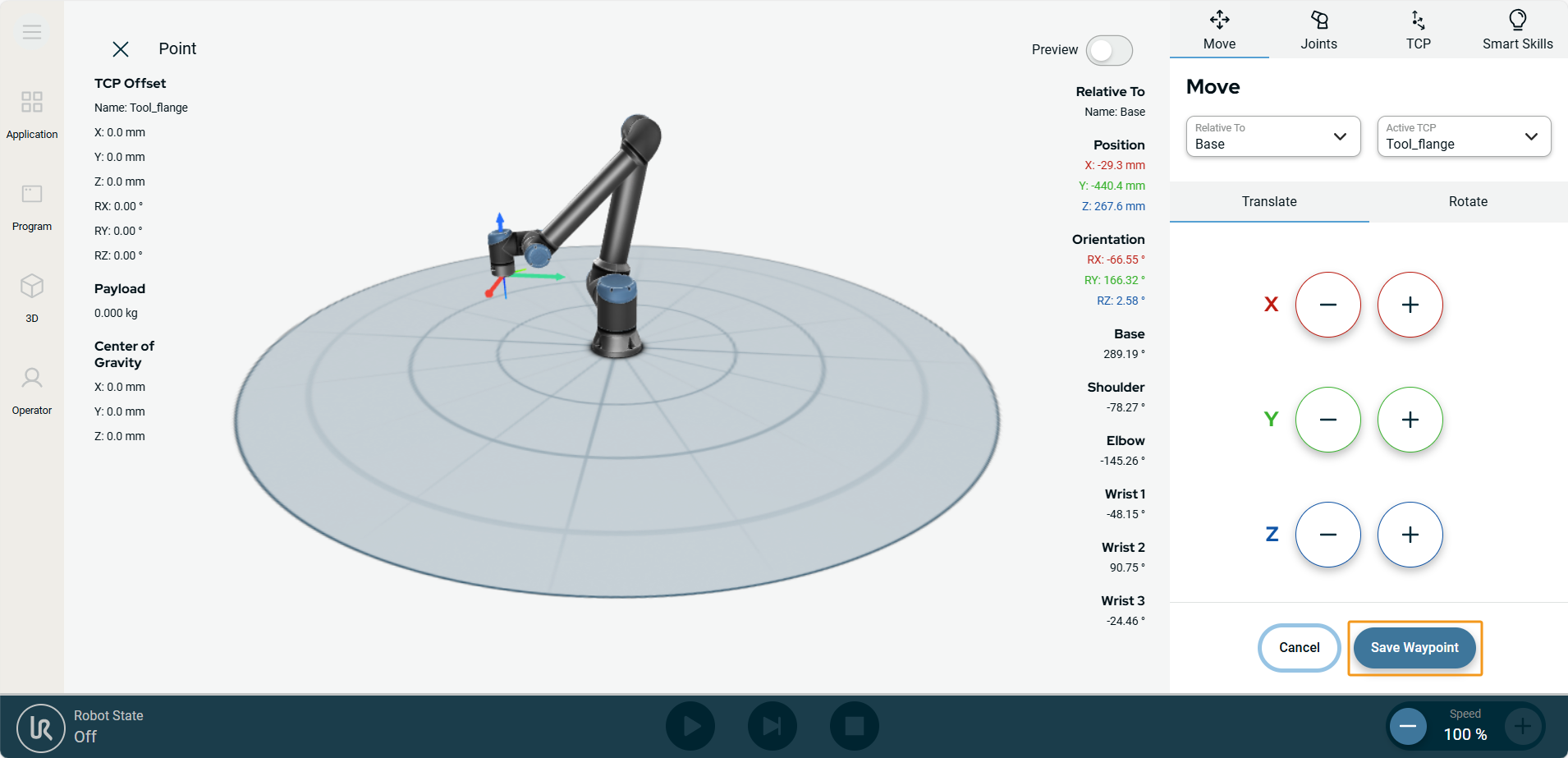
手動でロボットをキャリブレーションの初期位置に移動させます。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。
-
Save Waypoint をクリックします。