サンプルプログラム5:MM_S5_Viz_SetBranch
プログラム概要
機能 |
ロボットはMech-Vizプロジェクトをトリガーして実行し、Mech-Vizの分岐出口を設定します。その後、計画された経路を取得し、把持および配置を実行します。 |
||
ファイル場所 |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある
|
||
必要なプロジェクト |
Mech-VisionとMech-Vizプロジェクト
|
||
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S5_Viz_SetBranchサンプルプログラムのコードと関連する説明です。
| このサンプルは、MM_S2_Viz_Basicサンプルに比べて、Mech-Vizの分岐出口設定機能(太字部分のコード)のみが追加されています。そのため、MM_S2_Viz_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S2_Viz_Basicサンプルの説明 をご参照ください)。 |
MODULE MM_S5_Viz_SetBranch
!----------------------------------------------------------
! FUNCTION: trigger Mech-Viz project then set branch and get
! planned path
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define local num variables
LOCAL VAR num pose_num:=0;
LOCAL VAR num status:=0;
LOCAL VAR num toolid{5}:=[0,0,0,0,0];
LOCAL VAR num vis_pose_num:=0;
LOCAL VAR num count:=0;
LOCAL VAR num label{5}:=[0,0,0,0,0];
!define local joint&pose variables
LOCAL CONST jointtarget home:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL CONST jointtarget snap_jps:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget camera_capture:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS jointtarget jps{5}:=
[
[[11.1329,49.0771,-36.9666,0.5343,79.2476,-169.477],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[11.1329,49.0771,-36.9666,0.5343,79.2476,-169.477],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]
];
!define local tooldata variables
LOCAL PERS tooldata gripper1:=[TRUE,[[0,0,0],[1,0,0,0]],[0.001,[0,0,0.001],[1,0,0,0],0,0,0]];
PROC Sample_5()
!set the acceleration parameters
AccSet 50, 50;
!set the velocity parameters
VelSet 50, 1000;
!move to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
!initialize communication parameters (initialization is required only once)
MM_Init_Socket "127.0.0.1",50000,300;
!move to image-capturing position
MoveL camera_capture,v1000,fine,gripper1;
!open socket connection
MM_Open_Socket;
!trigger Mech-Viz project
MM_Start_Viz 2,snap_jps;
!set branch, "MM_Set_Branch Branch_Num,Exit_Num;"
MM_Set_Branch 1,1;
!get planned path; 1st argument (1) means getting pose in JPs
MM_Get_VizData 1, pose_num, vis_pose_num, status;
!check whether planned path has been got from Mech-Viz successfully
IF status <> 2100 THEN
!add error handling logic here according to different error codes
!e.g.: status=2038 means no point cloud in ROI
Stop;
ENDIF
!close socket connection
MM_Close_Socket;
!save waypoints of the planned path to local variables one by one
MM_Get_Jps 1,jps{1},label{1},toolid{1};
MM_Get_JPS 2,jps{2},label{2},toolid{2};
MM_Get_JPS 3,jps{3},label{3},toolid{3};
!follow the planned path to pick
!move to approach waypoint of picking
MoveAbsJ jps{1},v1000,fine,gripper1;
!move to picking waypoint
MoveAbsJ jps{2},v1000,fine,gripper1;
!add object grasping logic here, such as "setdo DO_1, 1;"
Stop;
!move to departure waypoint of picking
MoveAbsJ jps{3},v1000,fine,gripper1;
!move to intermediate waypoint of placing
MoveJ drop_waypoint,v1000,z50,gripper1;
!move to approach waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move to placing waypoint
MoveL drop,v300,fine,gripper1;
!add object releasing logic here, such as "setdo DO_1, 0;"
Stop;
!move to departure waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move back to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
ENDPROC
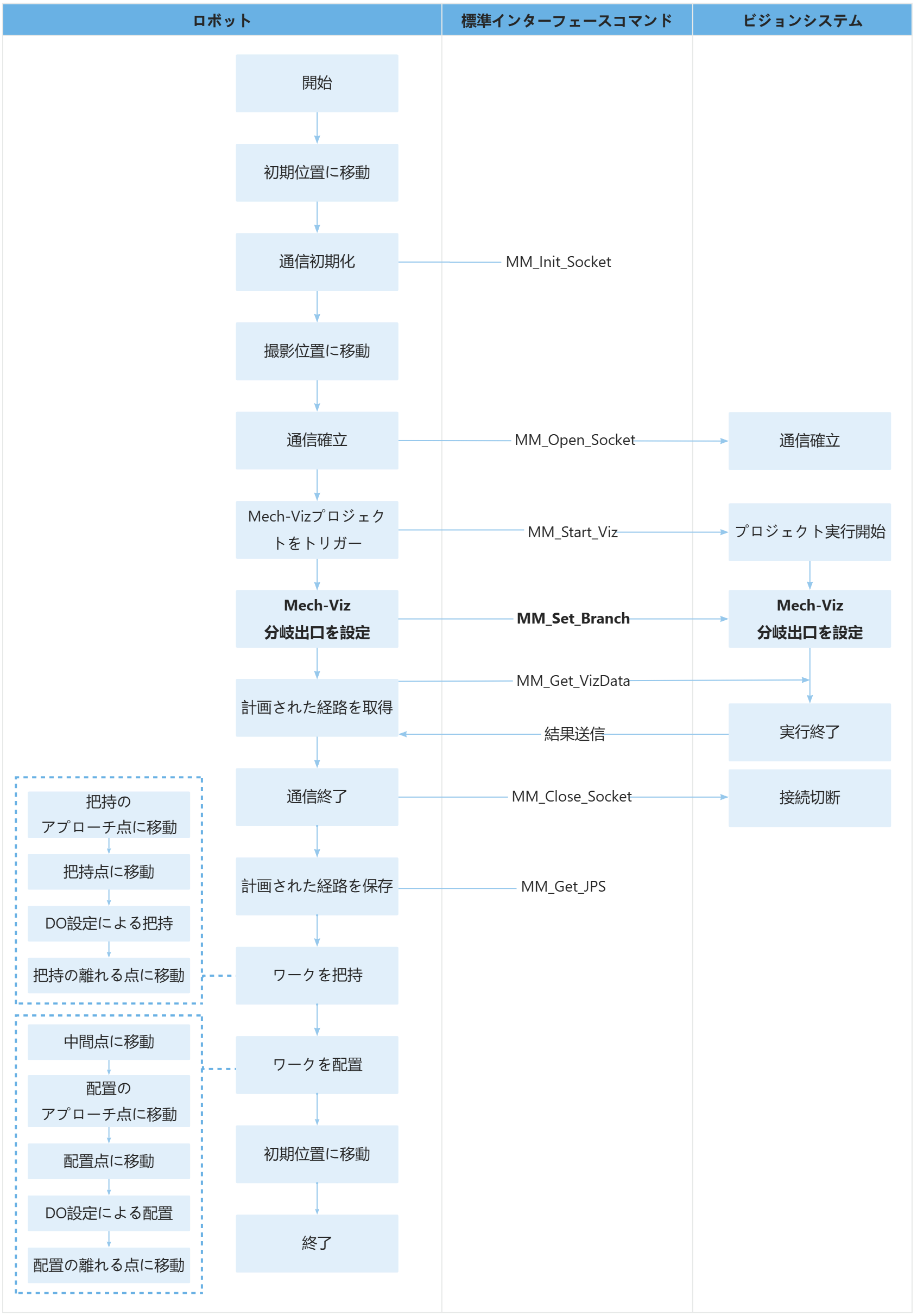
ENDMODULE上記のサンプルプログラムの処理流れは、下図の通りです。
下表はMech-Viz分岐出口設定のコードとその説明です。コマンド名のリンクをクリックすることで、その詳細を確認できます。
| 処理流れ | コートと説明 |
|---|---|
Mech-Vizの分岐ステップの出口を設定 |
このコマンドは、Mech-Vizプロジェクトが番号1の「メッセージによって異なる分岐を実行」ステップで出口0から実行を続けることを意味します。 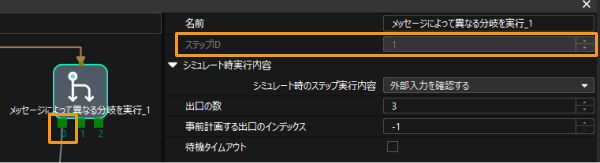
|