標準インターフェース通信設定
Mech-MindビジョンシステムとAUBO(ARCS)ロボットの間は、プラグイン形式で標準インターフェース通信を行います。以下では、AUBO(ARCS)ロボットにプラグインをインポートし、ビジョンシステムとロボット間の標準インターフェース通信の設定を完了する方法について説明します。
ハードウェアとソフトウェアのバージョンを確認
-
AUBOロボットの制御システムがARCSであることを確認してください。
-
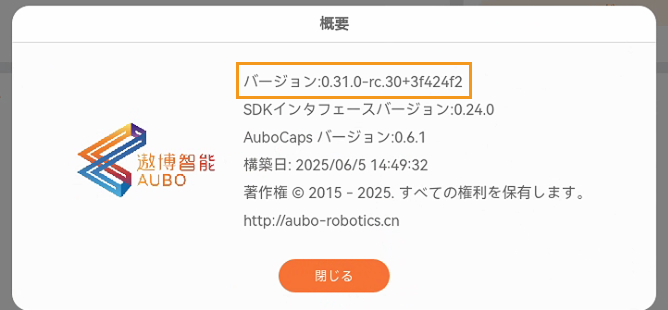
ティーチペンダントのバージョンが「0.31.0-rc.30」であることを確認してください。
(クリックして展開)詳細方法
-
ティーチペンダントの ホームページ で について をクリックすると、ティーチペンダントのバージョン番号を確認できます。

-
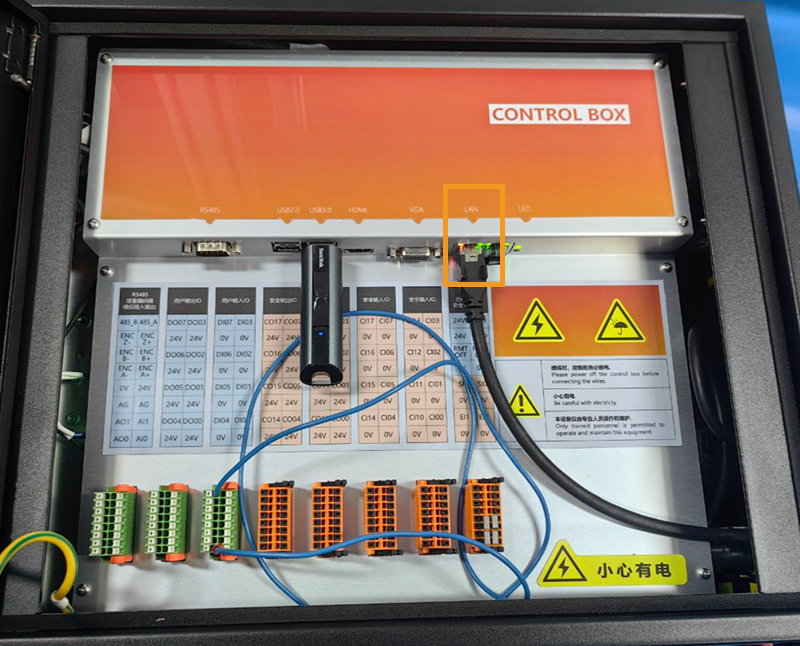
ネットワーク接続を確立
IPアドレス設定
-
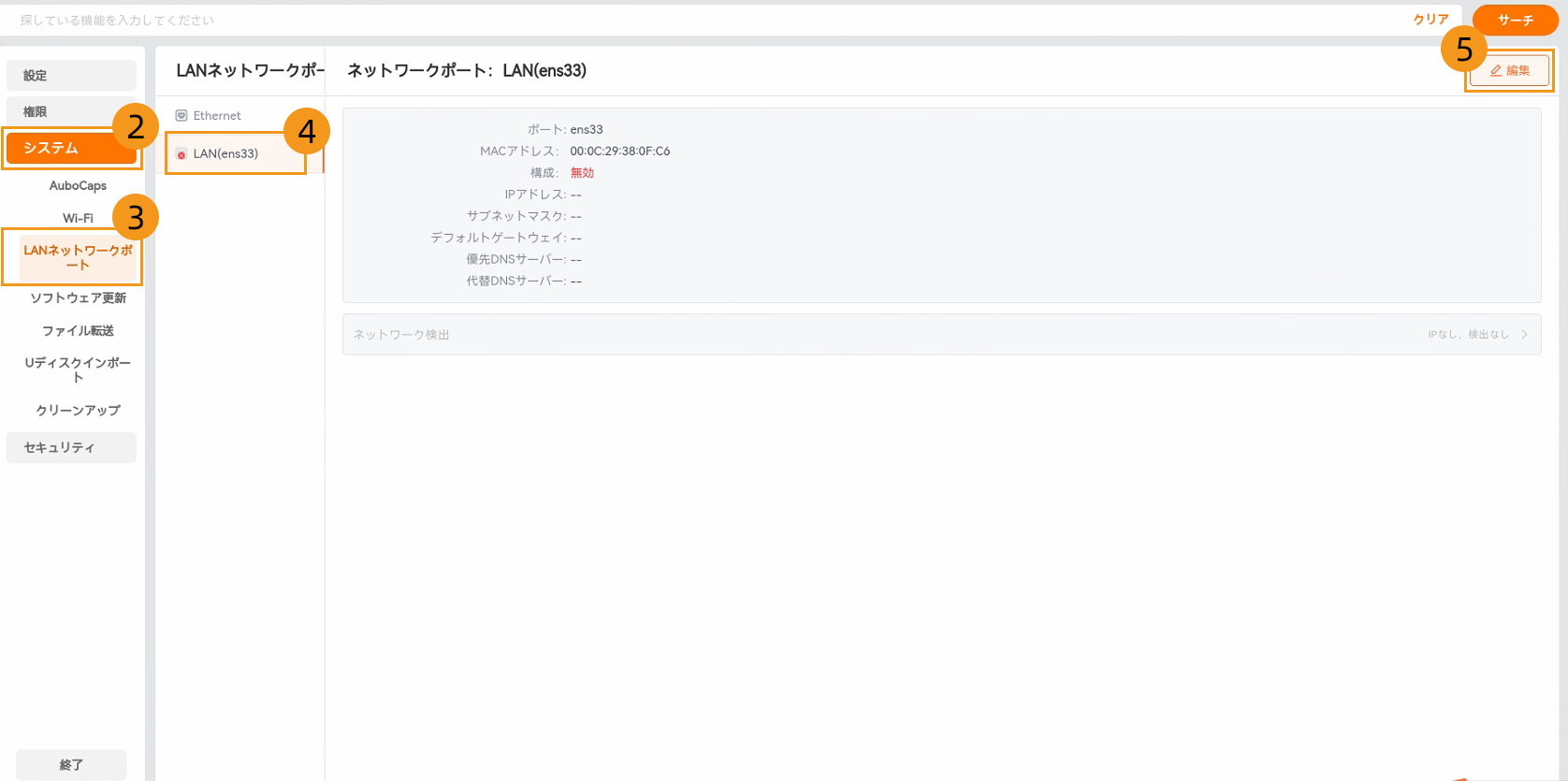
ティーチペンダントの ホームページ で、 をクリックし、実際のネットワーク環境に応じてロボットのIPアドレスを設定します。設定後、適用 をクリックします。

-
IPCのIPアドレスを設定 します。
IPCのIPアドレスは、ロボットのIPアドレスと同じネットワークセグメントにある必要があります。つまり、両方のIPアドレスのネットワーク部分とサブネットマスクが同じである必要があります。例えば、192.168.100.169/255.255.255.0と192.168.100.170/255.255.255.0は同じネットワークセグメントにあります。
オイラー角のタイプを設定
-
Mech-Vizを起動し、空のプロジェクトを新規作成 をクリックします。表示された画面で オンラインのロボットモデルを読み込む をクリックし、ロボットブランドで AUBO を選択します。右側パネルで、使用する具体的なロボットモデルを選択します。
-
次に、Mech-Vizソフトウェアの左側パネルで、ロボットを右クリックし、ロボットファイルディレクトリを開く を選択します。
-
2つ上のディレクトリに移動し、
Robot Library 2.0ディレクトリに入ります。
-
エディタで
robot_euler_angles_convention.jsonファイルを開き、以下のコードを追加し、ファイルを保存して閉じます。"AUBO": { "euler_angles_convention": "XYZ_S_w,p,r" }, -
エディタで
default_robot_communication_settings.jsonファイルを開き、以下のコードを追加し、ファイルを保存して閉じます。"AUBO": { "is_enable_interface": true, "is_interface_needed": true, "interface_format": "ASCII", "interface_name": "TCP Server" }, -
Mech-Vizソフトウェアを終了します。
「ロボット通信設定」を実行
-
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 ドロップダウンリストから 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
ポート番号は50000または50000以上に設定することを推奨します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-

-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
ロボットにプラグインをインポート
-
こちら をクリックしてプラグインをダウンロードします。ダウンロードした
mminterface-x.x.x.zipプラグインファイルをUSBメモリの ルートディレクトリ(最上位階層)にコピーします。-
本説明では
mminterface-1.0.0.zipを例にしていますが、他のバージョンファイル名の場合も操作方法は同様です。 -
ロボットが正常にUSBメモリを認識・読み取りできるよう、USBメモリのファイルシステムはFAT32形式を推奨します。
-
-
USBメモリをロボットのティーチペンダントのUSBポートに挿入します。
-
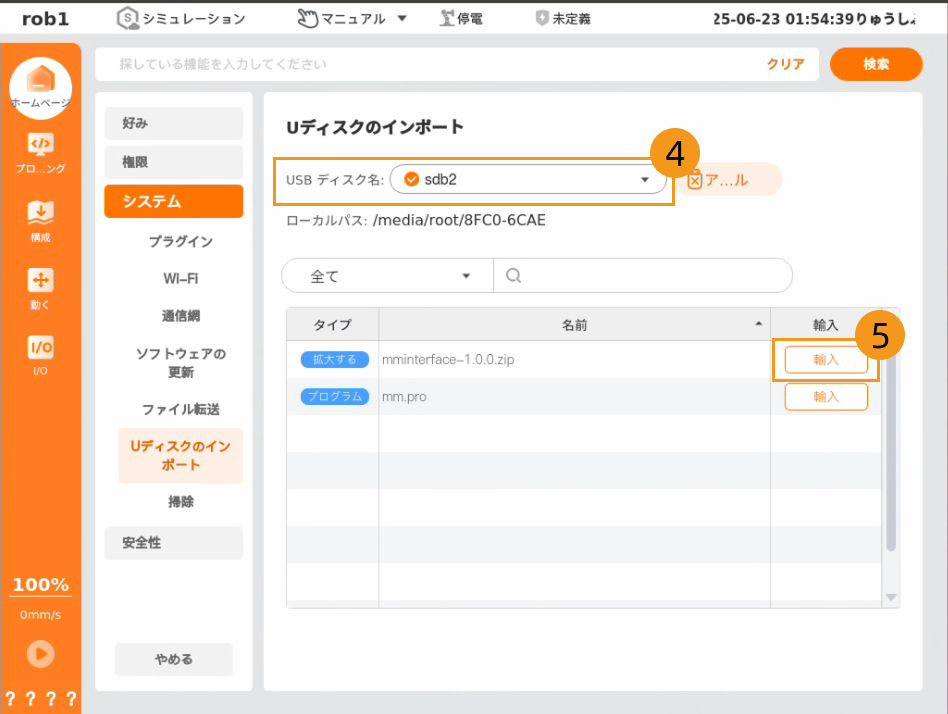
ティーチペンダントの ホームページ で をクリックし、使用するUSBディスク名を選択し、
mminterface-x.x.x.zipファイルの後の 輸入 をクリックします。
-
をクリックします。

-
ポップアップウィンドウで、インポートした
mminterface-x.x.x.zipファイルを選択し、選ぶ をクリックします。
-
以下の画面で、mminterfaceプラグインのステータスをオンに設定し、再起動 をクリックしてプラグインを有効にします。

標準インターフェース通信をテスト
-
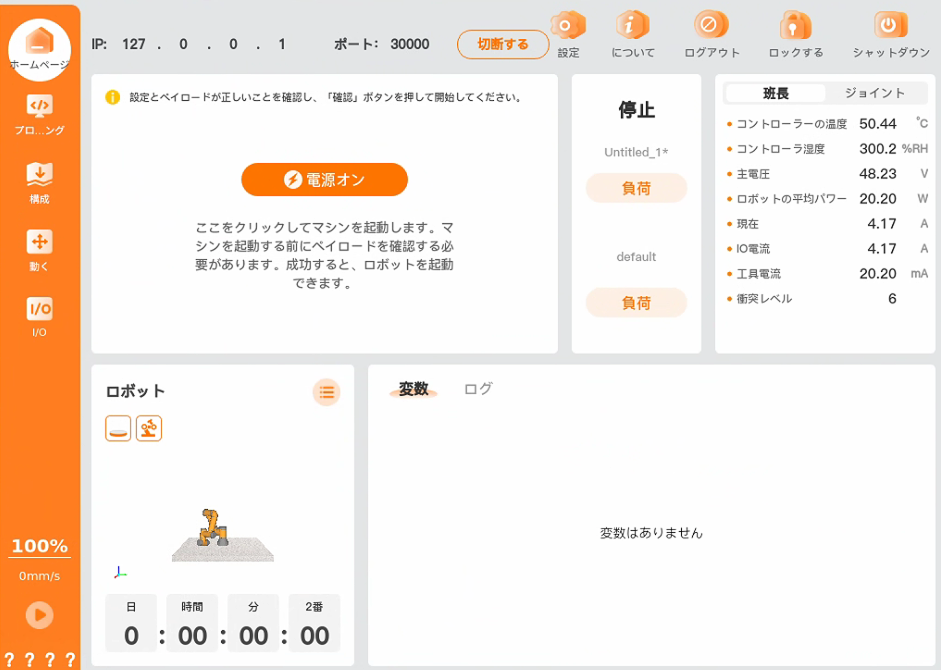
ロボットの電源が入っていない場合は、ティーチペンダントの ホームページ で 電源オン をクリックし、有効なペイロードを確認した後、 をクリックします。すでに電源が入っている場合は、この操作を省略し、次のステップに進んでください。
-
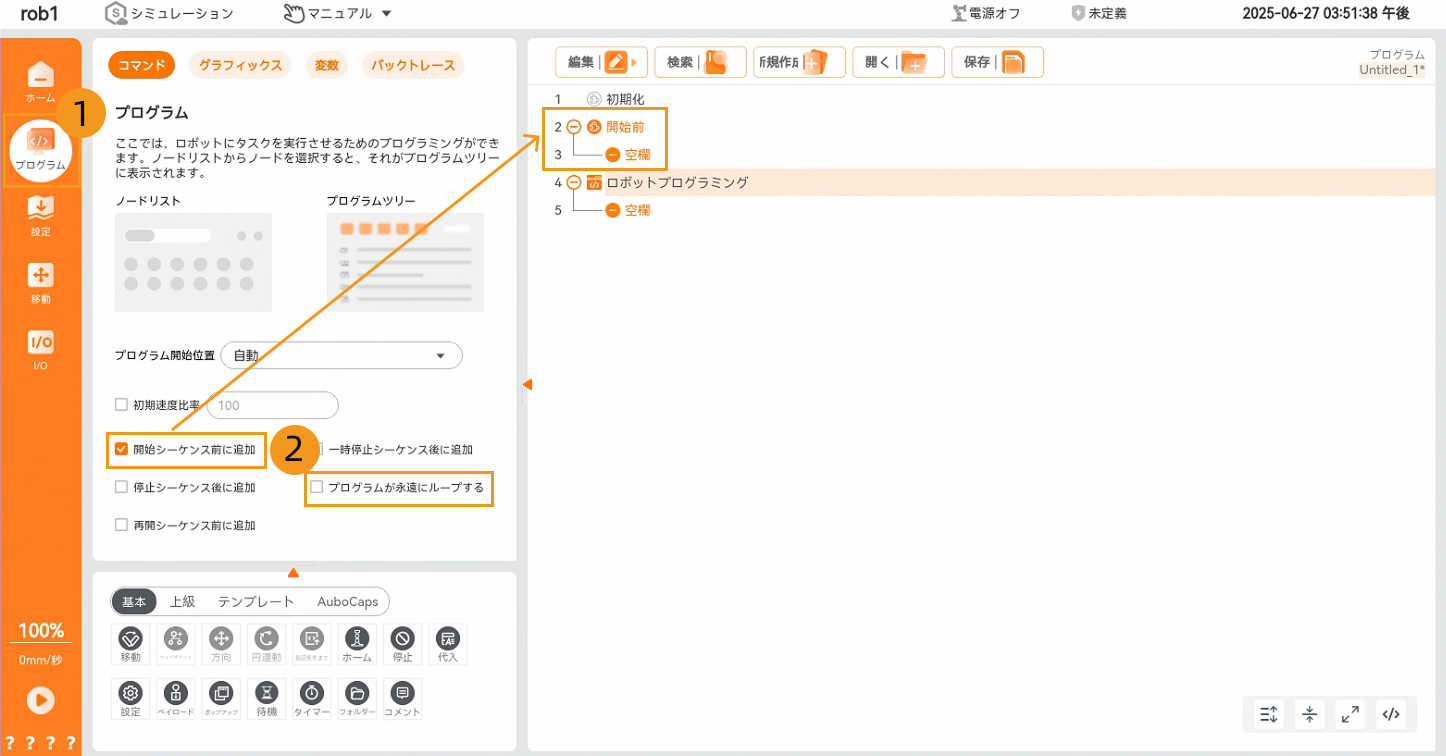
ティーチペンダント画面で プログラム をクリックし、開始シーケンス前に追加 にチェックを入れ、プログラムが永遠にループする のチェックを外します。右側のプログラム画面に 開始前 セグメントが表示されます。
-
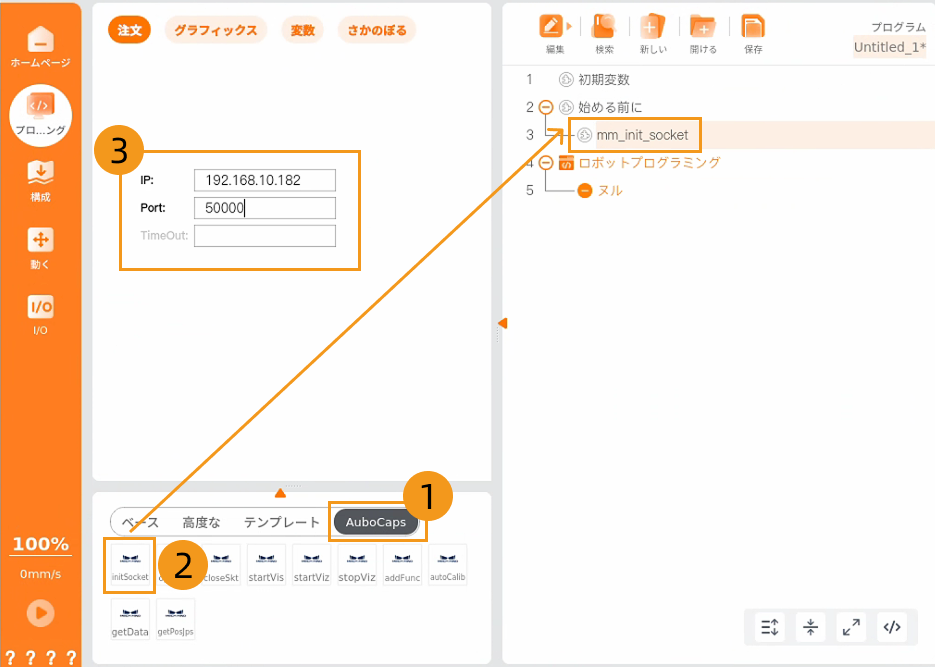
AuboCaps をクリックし、始める前に セグメント内の 空欄 を選択し、initSocket をクリックして mm_init_socket をプログラムに追加します。注文 タブで、IP にIPCのIPアドレス、Port にMech-Visionで設定されたホストポート番号を入力します。
-
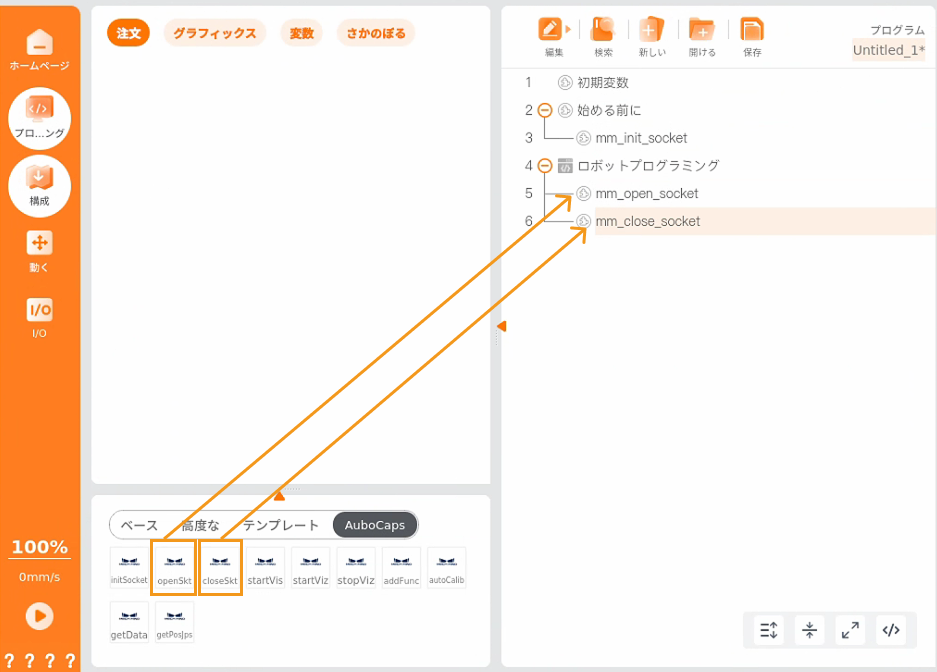
ロボットプログラミング で、openSkt と closeSkt をそれぞれクリックし、mm_open_socket と mm_close_socket をプログラムに追加します。
-
上記のプログラムを保存し、左下の 実行 ボタンをクリックして スタート地点から走る を選択します。

-
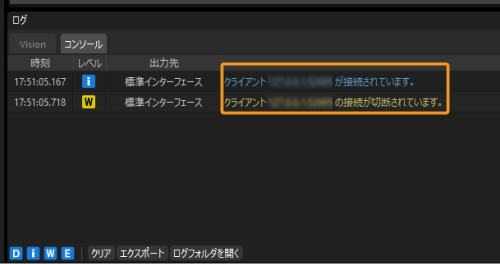
ロボットとビジョンシステム間の通信接続が成功すると、Mech-Visionのログバーの コンソール タブに関連メッセージが表示されます。