サンプルプログラム6:MM_S6_Viz_ErrorHandle
プログラム概要
機能 |
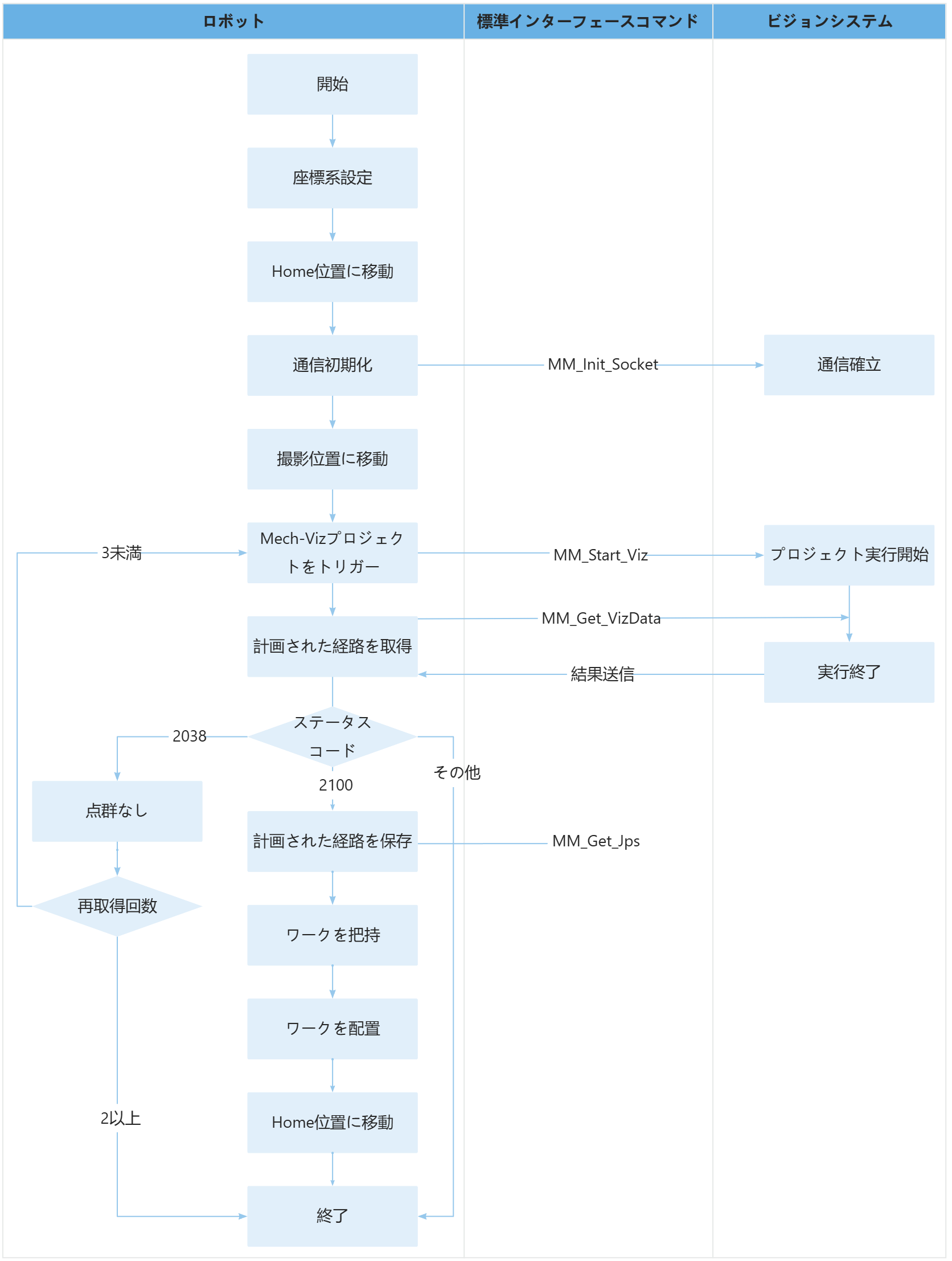
ロボットはMech-Vizプロジェクトをトリガーして実行し、計画された経路を取得します。その後、ステータスコードを確認して、計画された経路が正常に取得されたかどうかを判断します。経路が正常に取得できた場合、ロボットは把持および配置を実行します。それ以外の場合は、ロボットは停止します。 |
ファイル場所 |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある |
必要なプロジェクト |
Mech-VisionとMech-Vizプロジェクト |
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S6_Viz_ErrorHandleサンプルプログラムのコードと関連する説明です。
| このサンプルは、MM_S2_Viz_Basicサンプルに比べて、エラーコードの処理機能(太字部分のコード)のみが追加されています。そのため、MM_S2_Viz_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S2_Viz_Basicサンプルの説明 をご参照ください)。 |
DEF MM_S6_Viz_ErrorHandle ( )
;---------------------------------------------------
; FUNCTION: trigger Mech-Viz project and get
; planned path, handle errors according to status
; codes (if no point cloud in ROI, retry several
; times before exit loop)
; Mech-Mind, 2023-12-25
;---------------------------------------------------
;set current tool no. to 1
BAS(#TOOL,1)
;set current base no. to 0
BAS(#BASE,0)
;initialize variables
retry_cnt=0
;move to robot home position
PTP HOME Vel=100 % DEFAULT
;initialize communication parameters (initialization is required only once)
MM_Init_Socket("XML_Kuka_MMIND",873,871,60)
;move to image-capturing position
LIN camera_capture Vel=1 m/s CPDAT1 Tool[1] Base[0]
RECAP:
;trigger Mech-Viz project
MM_Start_Viz(2,init_jps)
;get planned path, 1st argument (1) means getting pose in JPs
MM_Get_VizData(1,pos_num,vis_pos_num,status)
;check whether planned path has been got from Mech-Viz successfully
IF status<> 2100 THEN
IF status == 2038 THEN
;no point cloud in ROI, add handling logic here
;self-adding then check retry counter
retry_cnt=retry_cnt+1
IF retry_cnt<3 THEN
;jump back to vision retry label if the number of retry times is less than 3
GOTO RECAP
ELSE
;reset counter and exit loop if the number of retry times has reached 3
retry_cnt=0
GOTO END_LOOP
ENDIF
ELSE
;add other error handling logic here
halt
GOTO END_LOOP
ENDIF
ENDIF
;save waypoints of the planned path to local variables one by one
MM_Get_Jps(1,Xpick_point1,label[1],toolid[1])
MM_Get_Jps(2,Xpick_point2,label[2],toolid[2])
MM_Get_Jps(3,Xpick_point3,label[3],toolid[3])
;follow the planned path to pick
;move to approach waypoint of picking
PTP pick_point1 Vel=50 % PDAT1 Tool[1] Base[0]
;move to picking waypoint
PTP pick_point2 Vel=10 % PDAT2 Tool[1] Base[0]
;add object grasping logic here, such as "$OUT[1]=TRUE"
halt
;move to departure waypoint of picking
PTP pick_point3 Vel=50 % PDAT3 Tool[1] Base[0]
;move to intermediate waypoint of placing
PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0]
;move to approach waypoint of placing
LIN drop_app Vel=1 m/s CPDAT3 Tool[1] Base[0]
;move to placing waypoint
LIN drop Vel=0.3 m/s CPDAT4 Tool[1] Base[0]
;add object releasing logic here, such as "$OUT[1]=FALSE"
halt
;move to departure waypoint of placing
LIN drop_app Vel=1 m/s CPDAT3 Tool[1] Base[0]
;move back to robot home position
PTP HOME Vel=100 % DEFAULT
END_LOOP:
halt
END上記のサンプルプログラムの処理流れは、下図の通りです。
下表は、エラーコード処理のコードとその説明です。
| 処理流れ | コートと説明 | ||
|---|---|---|---|
異なるステータスコードへの処理 |
ロボットが MM_Get_VizData コマンドを実行した後、コマンド実行のステータスコードは変数statusに保存されます。ユーザーは具体的なステータスコードに基づいて適切な処理を行うことができます。このサンプルでの処理ロジックは次の通りです。
|