サンプルプログラム3:Mech-Visionの計画経路を取得
プログラム概要
機能 |
ロボットがMech-Visionプロジェクトをトリガーして実行し、その後計画された経路を取得して把持作業を実行します。 |
必要なプロジェクト |
Mech-Visionプロジェクト |
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
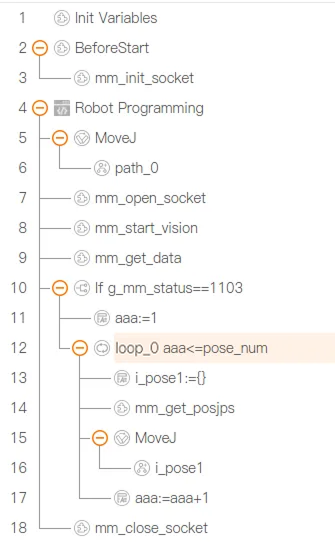
以下は参考用のプログラム例です。
下表は上記のプログラムのコードとその説明です。コマンド名のリンクをクリックすることで、その詳細を確認できます。
| 処理流れ | コートと説明 | ||
|---|---|---|---|
通信初期化 |
mm_init_socket:通信を初期化するためのコマンド。パラメータ説明は以下の通りです。 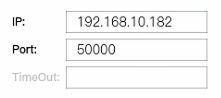
このコマンドは、「mm_init_socket」コマンドを通じて、ロボットが通信対象(IPC)のIPアドレスとポート番号を指定することを意味します。
|
||
撮影位置に移動 |
|
||
通信確立 |
ロボットは mm_open_socket コマンドを使用して、ビジョンシステムとの間のTCPプロトコル通信接続を確立します。 |
||
Mech-Visionプロジェクトをトリガー |
mm_start_vision:Mech-Visionプロジェクトの実行をトリガーするためのコマンド。パラメータ説明は以下の通りです。 
このコマンドは、ロボットがビジョンシステムをトリガーして番号1のMech-Visionプロジェクトを実行し、Mech-Visionプロジェクトがすべての経路点を返すことを期待することを意味します。 |
||
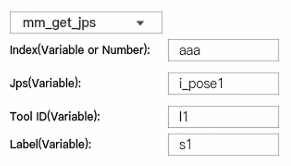
計画された経路を取得 |
mm_get_data:データを取得するためのコマンド。パラメータ説明は以下の通りです。 
このコマンドは、ロボットがMech-Visionプロジェクト1から返された計画経路を取得することを意味します。
|
||
計画経路を保存して各経路点に移動 |
ステータスコードg_mm_statusが1103の場合、ロボットが計画された経路の取得に成功したことを意味します。そうでない場合、ビジョンシステムにエラーが発生したことを意味します。ユーザーは、特定のエラーコードに応じて適切な処理を行うことが可能です。
|
||
通信接続を切断 |
ロボットは mm_close_socket コマンドを使用して、ビジョンシステムとの間のTCPプロトコル通信接続を切断します。 |