サンプルプログラム7:MM_S7_Viz_SwitchTCP
プログラム概要
機能 |
ロボットはMech-Vizプロジェクトをトリガーして実行し、計画された経路を取得します。その後、把持点のロボットハンド番号に基づいて対応するロボットハンドを切り替え、把持および配置を実行します。 |
ファイル場所 |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある |
必要なプロジェクト |
Mech-VisionとMech-Vizプロジェクト |
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S7_Viz_SwitchTCPサンプルプログラムのコードと関連する説明です。
| このサンプルは、MM_S2_Viz_Basicサンプルに比べて、ロボットハンド番号に基づいてロボットハンドを切り替える機能(太字部分のコード)のみが追加されています。そのため、MM_S2_Viz_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S2_Viz_Basicサンプルの説明 をご参照ください)。 |
1: !-------------------------------- ;
2: !FUNCTION: trigger Mech-Viz ;
3: !project and get planned path, ;
4: !switch TCP according to ;
5: !the tool NO. ;
6: !Mech-Mind, 2023-12-25 ;
7: !-------------------------------- ;
8: ;
9: !set current uframe NO. to 0 ;
10: ユーザザヒョウバンゴウ=0 ;
11: !set current tool NO. to 1 ;
12: ツールザヒョウバンゴウ=1 ;
13: !move to robot home position ;
14:カクジク イチ[1] 100% イチギメ ;
15: !initialize communication ;
16: !parameters(initialization is ;
17: !required only once) ;
18: ヨビダシ MM_INIT_SKT('8','127.0.0.1',50000,5) ;
19: !move to image-capturing position ;
20:チョクセン イチ[2] 1000mm/sec イチギメ ;
21: !trigger Mech-Viz project ;
22: ヨビダシ MM_START_VIZ(2,10) ;
23: !get planned path, 1st argument ;
24: !(2) means getting pose in TCP ;
25: ヨビダシ MM_GET_VIZ(2,51,52,53) ;
26: !check whether planned path has ;
27: !been got from Mech-Viz ;
28: !successfully ;
29: モシ レジ[53]<>2100,ジャンプ ラベル[99] ;
30: !save waypoints of the planned ;
31: !path to local variables one ;
32: !by one ;
33: ヨビダシ MM_GET_POS(1,60,70,80) ;
34: ヨビダシ MM_GET_POS(2,61,71,81) ;
35: ヨビダシ MM_GET_POS(3,62,72,82) ;
36: !switch TCP according to the ;
37: !received tool NO. ;
38: モシ レジ[81]=1,ジャンプ ラベル[1] ;
39: モシ レジ[81]=2,ジャンプ ラベル[2] ;
40: ジャンプ ラベル[999] ;
41: ;
42: ラベル[1:use tool NO.1] ;
43: !set current tool NO. to 1 ;
44: ツールザヒョウバンゴウ=1 ;
45: !reset tool signal ;
46: !DO[1]=OFF ;
47: !set a Flag ;
48: F[1]=(オン) ;
49: ジャンプ ラベル[3] ;
50: ;
51: ラベル[2:use tool NO.2] ;
52: !set current tool NO. to 2 ;
53: ツールザヒョウバンゴウ=2 ;
54: !reset tool signal ;
55: !DO[2]=OFF ;
56: !set a Flag ;
57: F[2]=(オン) ;
58: ジャンプ ラベル[3] ;
59: ;
60: ラベル[3:pick path] ;
61: !follow the planned path to pick ;
62: !move to approach waypoint ;
63: !of picking ;
64:チョクセン イチレジ[60] 1000mm/sec イチギメ ;
65: !move to picking waypoint ;
66:チョクセン イチレジ[61] 300mm/sec イチギメ ;
67: !add object grasping logic here, ;
68: !IF (F[1]),DO[1]=(ON) ;
69: !IF (F[2]),DO[2]=(ON) ;
70: イチジテイシ ;
71: !move to departure waypoint ;
72: !of picking ;
73:チョクセン イチレジ[62] 1000mm/sec イチギメ ;
74: !move to intermediate waypoint ;
75: !of placing ;
76:カクジク イチ[3] 50% ナメラカ100 ;
77: !move to approach waypoint ;
78: !of placing ;
79:チョクセン イチ[4] 1000mm/sec イチギメ ツールホセイ,イチレジ[2] ;
80: !move to placing waypoint ;
81:チョクセン イチ[4] 300mm/sec イチギメ ;
82: !add object releasing logic here, ;
83: !IF (F[1]),DO[1]=(OFF) ;
84: !IF (F[2]),DO[2]=(OFF) ;
85: イチジテイシ ;
86: !move to departure waypoint ;
87: !of placing ;
88:チョクセン イチ[4] 1000mm/sec イチギメ ツールホセイ,イチレジ[2] ;
89: !move back to robot home position ;
90:カクジク イチ[1] 100% イチギメ ;
91: !reset the Flags ;
92: F[1]=(オフ) ;
93: F[2]=(オフ) ;
94: シュウリョウ ;
95: ;
96: ラベル[99:vision error] ;
97: !add error handling logic here ;
98: !according to different ;
99: !error codes ;
100: !e.g.: status=2038 means no ;
101: !point cloud in ROI ;
102: イチジテイシ ;
103: ;
104: ラベル[999:label error] ;
105: !add handling logic here if the ;
106: !label is invalid ;
107: イチジテイシ ;上記のサンプルプログラムの処理流れは、下図の通りです。
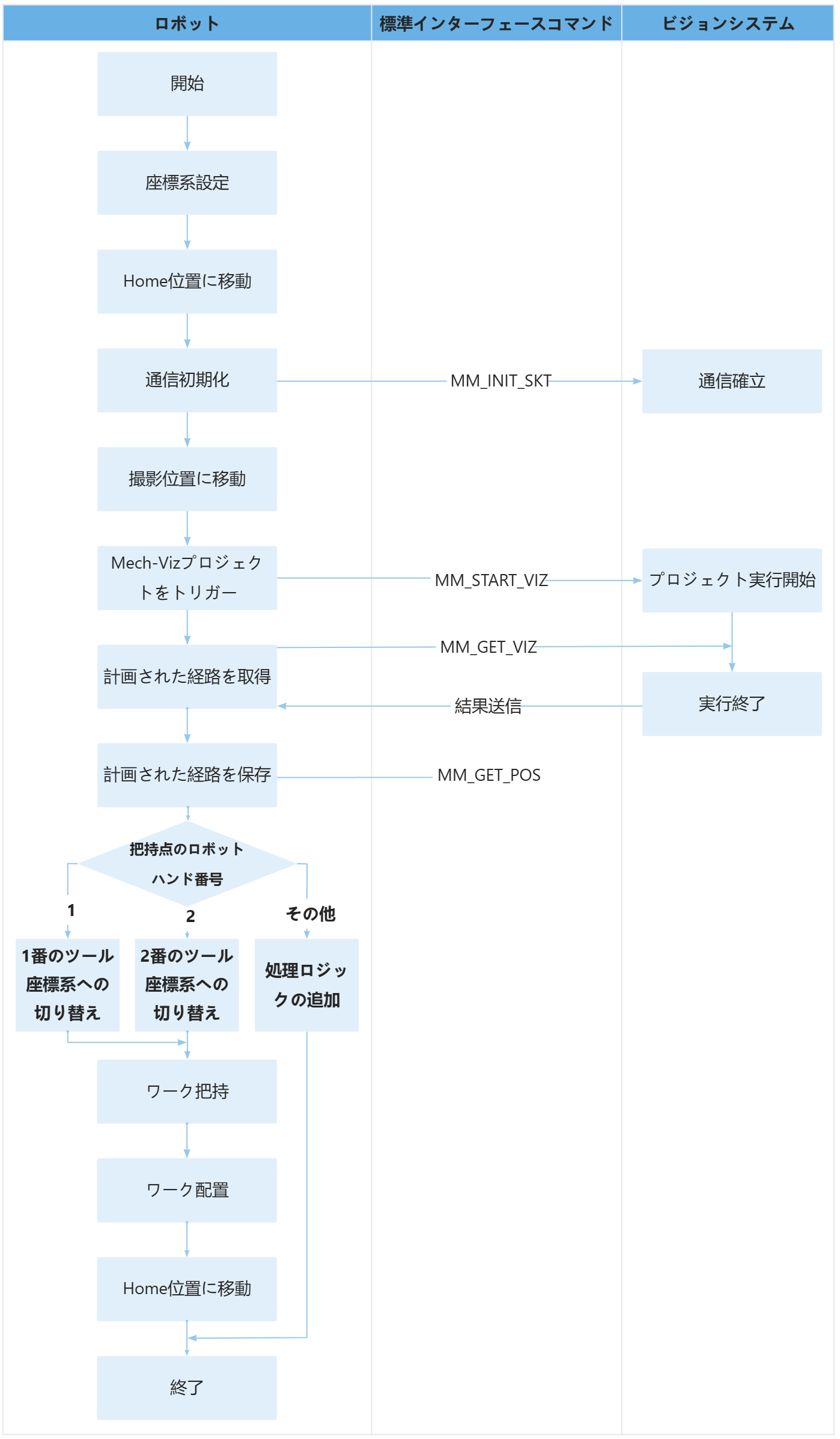
下表は追加されたコードとその説明です。
| 処理流れ | コートと説明 | ||
|---|---|---|---|
計画された経路を取得 |
このコマンドは、ロボットがMech-Vizプロジェクトから返された計画経路を取得することを意味します。
|
||
計画された経路を保存 |
「ヨビダシ MM_GET_POS(1,60,70,80)」コマンドは、最初の経路点のツール位置姿勢、ラベル、およびロボットハンド番号をそれぞれ指定されたレジスタに保存することを意味します。
|
||
ロボットハンド番号に基づいてロボットハンドを切り替える |
ユーザーはレジ[81]の値に基づいて、ロボットが把持点に移動する際に使用するロボットハンドを決定できます。上記のコードの処理流れは次の通りです。
ロボットがDO[1]信号でロボットハンド1を制御し、DO[2]信号でロボットハンド2を制御する場合、プログラムはF[1]とF[2]という2つのフラグを使用して両者の関係を確立する必要があります。
以下に、ロボットハンド番号1を例として、把持および配置の流れを説明します。
番号2のロボットハンドを使用する場合も、上記の流れとほぼ同様ですが、詳細な説明はここでは省略します。 |