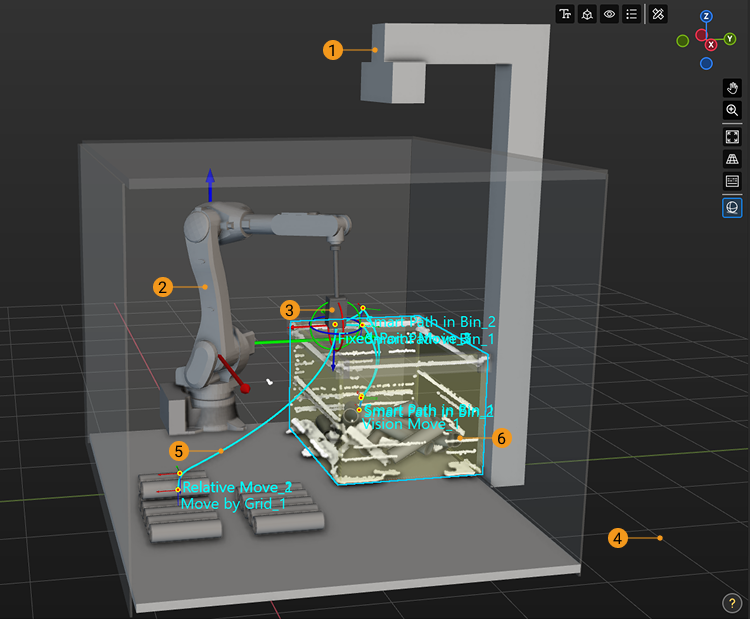
三维仿真空间
三维仿真空间显示机器人、场景物体、末端工具、工件模型、机器人运动轨迹、抓取点和碰撞等,同时在三维仿真空间中可以拖拽场景物体模型。
序号 |
说明 |
1 |
场景物体 |
2 |
机器人 |
3 |
末端工具 |
4 |
地板 |
5 |
运动轨迹 |
无论是在控制真实机器人运行,还是在仿真工程,三维仿真空间均可以显示机器人即将行进的轨迹。 通过仿真轨迹可以更合理地规划机器人运动轨迹。 |
|
6 |
视觉结果 |
软件每次都会将视觉服务返回的视觉结果显示在三维仿真空间内。 一份完整的视觉结果通常包括:工件点云、场景点云、工件位姿、工件序号以及代表工件特性的工件标签。 |
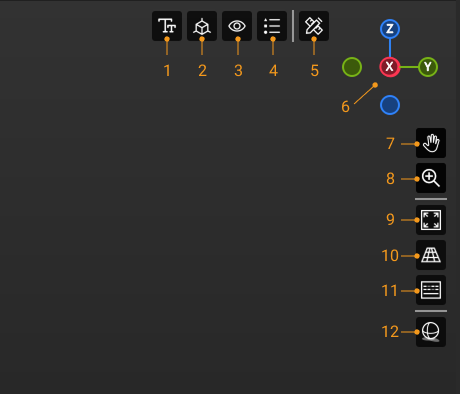
组件简介
序号 |
说明 |
1 |
单击该图标后,显示文字及坐标轴尺寸设置面板。 |
2 |
单击该图标后,显示坐标系可见性设置面板。 |
3 |
单击该图标后,显示视觉结果内容可见性设置面板。 |
4 |
单击该图标后,显示视觉位姿颜色图例面板。关于不同颜色图例对应的位姿状态,请参见位姿状态介绍章节。 |
5 |
单击后开启测量模式,具体操作请参考测量模式章节。 |
6 |
可交互坐标系,显示当前视图的方向。 |
单击任意轴标签(X、Y、Z、-X、-Y、-Z)将对齐视图到该轴。长按鼠标左键并向任意方向拖动可交互坐标系可旋转视图。 |
|
7 |
平移视图 |
长按该图标(或 Shift + 鼠标中键)并向任意方向拖动,可平移视图。 |
|
8 |
缩放视图 |
长按该图标(或向前滑动鼠标滚轮)并向上拖动放大视角,向下拖动(或向后滑动鼠标滚轮)缩小视角。 |
|
9 |
适应屏幕 |
10 |
单击该图标可切换透视\正交视图。 |
11 |
显示按键 |
单击该图标后,在三维仿真空间右下角显示操作按键,再次单击取消显示。 |
|
12 |
单击该图标后,显示3D模型阴影,增强仿真的立体效果。 |