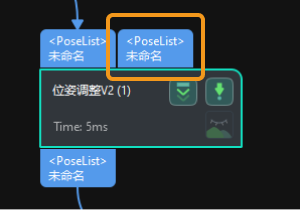
通过添加位姿调整项对位姿进行调整(自定义模式)
本节介绍如何在自定义模式下通过添加位姿调整项来调整位姿。
|
每次仅可选择一个位姿调整项,但可重复添加相同的位姿调整项。 |
翻转位姿,使翻转轴与目标方向夹角最小
使用方法
设置目标方向
提供三种设置目标方向的方法,分别为使用机器人坐标系、通过拖拽器设置和外部步骤输入,具体说明如下表所示。
序号 |
设置目标方向的方式 |
描述 |
方法 |
图示 |
1 |
使用机器人坐标系 |
通过设置机器人坐标系各坐标轴的指向来设置参考方向 |
|
|
2 |
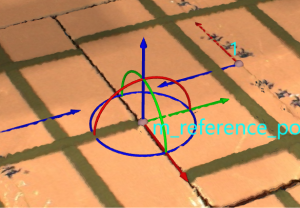
通过拖拽器设置 |
通过设置拖拽器的位置和姿态来设置目标方向。 |
|
|
3 |
外部步骤输入 |
通过其他步骤输入参考位姿。 |
|
|
旋转位姿,使旋转轴与目标方向夹角最小
使用方法
设置目标方向
提供三种设置目标方向的方法,分别为使用机器人坐标系、通过拖拽器设置和外部步骤输入,具体说明如下表所示。
序号 |
设置目标方向的方式 |
描述 |
方法 |
图示 |
1 |
使用机器人坐标系 |
通过选择机器人坐标系各坐标轴的指向来设置参考方向 |
|
|
2 |
通过拖拽器设置 |
通过设置拖拽器的位置和姿态来设置目标方向。 |
|
|
3 |
外部步骤输入 |
通过其他步骤输入参考位姿。 |
|
|
将位姿的轴旋转至目标方向
使用方法
设置目标方向
提供三种设置目标方向的方法,分别为使用机器人坐标系、通过拖拽器设置和外部步骤输入,具体说明如下表所示。
序号 |
设置目标方向的方式 |
描述 |
方法 |
图示 |
1 |
使用机器人坐标系 |
通过设置机器人坐标系各坐标轴的指向来设置参考方向 |
|
|
2 |
通过拖拽器设置 |
通过设置拖拽器的位置和姿态来设置目标方向。 |
|
|
3 |
外部步骤输入 |
通过其他步骤输入参考位姿。 |
|
|