FAQ与故障处理
FAQ
如何对七轴机器人标定?
|
此处,七轴机器人不包括六轴带滑轨机器人。 |
对于ABB、FANUC、KUKA和YASKAWA七轴机器人,在将第七轴解耦后可以通过标准接口通信进行自动标定。
对于其他七轴机器人,可以使用手动标定方法,优先推荐使用TCP尖点触碰法进行标定。
如果现场没有合适的尖点或尖点无法固定,可使用标定板多个随机位姿法进行标定。在标定过程中,需要限制其中一个轴的运动,将七轴机器人理想化为六轴机器人,其余操作和六轴机器人标定基本一致。
|
在进行七轴机器人手眼标定前,请先检查机器人绝对精度。 |
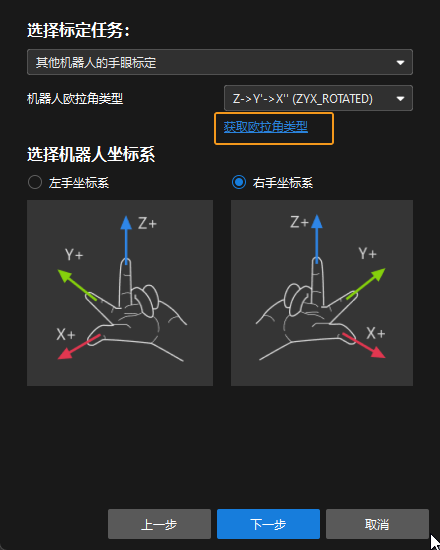
当不确定机器人欧拉角选型时如何标定?
不确定机器人欧拉角类型时,可以利用相机标定界面“获取欧拉角类型”来获知当前机器人的欧拉角类型。具体操作如下:
-
打开Mech-Vision软件,在工具栏上单击相机标定按钮。标定预配置窗口将弹出。
-
在选择如何标定窗口,选择开始新的标定单选框,然后单击下一步按钮。
-
在选择标定任务窗口,从下拉列表框中选择其他机器人的手眼标定,然后单击获取欧拉角类型链接打开工具。
-
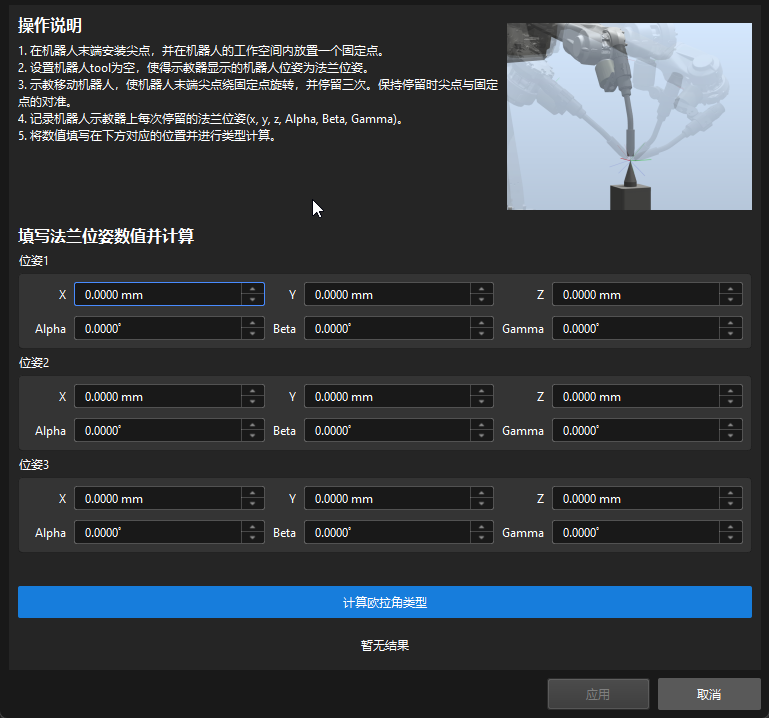
按照工具的操作说明记录三个机器人法兰位姿并输入,然后单击计算欧拉角类型得到机器人的欧拉角类型。
检查内参及校正内参时有什么注意事项?
UHP系列相机需要使用camera1模式检查内参和手眼标定,不能使用内参校正功能,如需校正内参,请联系梅卡曼德技术支持。
在校正内参时:
-
如果使用LSR系列相机,外置2D相机不能使用1200W模式。
-
如果使用DEEP相机,深度图不能降采样。
UR机器人手动标定时有什么注意事项?
使用UR机器人进行手动标定时,请注意在输入位姿时,Mech-Vision软件仅支持四元数或欧拉角,而UR机器人示教器上显示的为旋转向量。如果直接输入,会导致标定结果异常。
对于传送带场景,机器人(手)和相机(眼)不在同一视野内,应该如何进行手眼标定?
在杂物分拣线上,可能存在多台机器臂。例如相机在传送带的入料端,机器臂在相机较远的位置(六米后)。
在此场景,请参考参考TCP尖点触碰操作指导进行手眼标定:
-
标定板放置在相机视野下采集图像。
-
标定板随输送线移动,记录移动距离。
-
机器臂使用尖点戳标定板,数值减除上面的移动距离。
立柱机器人应该如何进行手眼标定?
对于使用立柱机器人(四自由度)并且相机使用ETH方式安装的场景,如果机器人控制器可以正常读取到尖点的坐标,可以参考桁架机器人标定流程进行标定。
如何解读Mech-Vision软件中的内参和外参文件?
关于如何解读Mech-Eye SDK中的内参检查结果,以及Mech-Vision软件中内参和外参文件,请参考该社区贴。
不在机器人模型库的机器人型号是否支持自动标定?
-
如果适配,只要为该机器人型号制作并导入机器人模型,该机器人型号就可以支持自动标定。
-
如果未适配,可以参考未适配标准接口通信的机器人,是否支持通过标准接口通信进行自动标定?进行配置,从而实现通过标准接口通信进行自动标定。
为什么选择机器人型号后,标定预配置界面没有显示“自动标定”选项?
对于未适配主控通信或者标准接口通信的机器人,Mech-Vision软件仅支持手动标定方法,因此标定预配置界面只显示“手动标定”选项,不显示“自动标定”选项。
请参考如下内容确认当前选择的机器人品牌是否适配了主控通信或者标准接口通信:
为什么机器人的“自动标定”选项不支持“标准接口”?
如果选择了“自动标定”以及“主控”之后界面提示“该品牌机器人暂无标准接口标定样例程序”,则说明选择的机器人品牌未适配标准接口通信。你也可以参考标准接口适配一览表章节进行确认。
如果确认机器人品牌已经适配标准接口通信,则说明软件的安装或运行环境存在问题。请按照如下步骤进行排查:
-
检查安装Mech-Vision & Mech-Viz软件时是否已使用管理员权限。
检查方法:在Mech-Viz中的资源树中,右键单击机器人然后选择打开机器人文件目录,在资源管理器中返回到机器人模型库根目录“Robot Library 2.x”。检查是否存在“default_robot_communication_settings.json”文件。
-
如果存在,则说明安装软件时已使用管理员权限。
-
如果不存在,请使用管理员权限重新安装软件。
-
-
如果工控机上已启用防火墙,请确是否已将软件添加至防火墙白名单。
-
确认是否将工控机加入了域。如果加入了域,可能会影响通信功能。请联系你的IT管理员进行排查或配置修改。
故障处理
进行手眼标定时,检测不到标定板
问题现象:
使用Mech-Vision软件进行手眼标定时,无法检测到标定板,或标定板上标定圆。
影响版本:
所有Mech-Vision版本
解决方案:
该问题可以通过如下方法解决:
进行手眼标定时,内参检查不通过
问题现象:
使用Mech-Vision软件进行手眼标定时,在“安装标定板并检查内参”步骤,内参检查不通过(失败)。
影响版本:
所有Mech-Vision版本
解决方案:
该问题可以通过如下方法解决:
自动手眼标定过程中,自动生成的路径参数异常
问题现象:
使用Mech-Vision软件进行自动手眼标定时,通过软件自动生成了移动路径,但是路径参数存在异常。
影响版本:
所有Mech-Vision版本
解决方案:
该问题可以通过如下方法解决:
-
检查机器人型号是否正确。
-
如果是,执行第2步。
-
如果否,执行第4步。
-
-
检查标定过程中标定板是否超出相机视野。
-
如果是,执行第3步。
-
如果否,继续执行后续标定步骤。
-
-
确认标定前是否手动移动或旋转过标定板。
-
如果是,重新执行整个标定流程。
-
如果否,请联系梅卡曼德技术支持并告知已排查上述项目。
-
-
在机器人通信配置界面选择正确的机器人型号并重新标定,确认是否解决问题。
-
如果是,故障排查结束。
-
如果否,执行第5步。
-
-
确认机器人侧的机器人坐标系(基坐标系、法兰坐标系)选择是否正确。
-
如果是,请联系梅卡曼德技术支持并告知已排查上述项目。
-
如果否,在机器人侧选择正确的坐标系并重新进行标定。
-
自动手眼标定过程中,机器人移动超时
问题现象:
使用Mech-Vision软件进行自动手眼标定时,机器人移动超时。
影响版本:
所有Mech-Vision版本
解决方案:
该问题可以通过如下方法解决:
-
确认机器人是否移动较慢。
-
如果是,提升机器人移动速度并重新进行标定。
-
如果否,执行第2步。
-
-
检查机器人侧是否出现非视觉相关的报错。
-
如果是,执行第3步。
-
如果否,检查机器人状态,确保机器人处于连续运行状态(手动连续运行或者自动连续运行)。
-
-
检查机器人侧是否存在轨迹点(路径点)不可达或奇异点问题。
-
如果是,执行第4步。
-
如果否,请联系梅卡曼德技术支持,提供机器人报错图片并告知已排查上述项目。
-
-
检查机器人侧是否存在轨迹点不可达报错。
-
如果是,执行第5步。
-
如果否,执行第6步。
-
-
检查机器人模型软限位是否和真实机器人一致。
-
如果是,请联系梅卡曼德技术支持并告知已排查上述项目。
-
如果否,调整机器人模型的软限位,并重新进行标定。
-
-
检查机器人侧是否存在奇异点报错。
-
如果是,请执行第7步。
-
如果否,请联系梅卡曼德技术支持,提供机器人报错图片并告知已排查上述项目。
-
-
将移动类型改为关节运动(需要注意场景碰撞问题),重新进行标定,确认问题是否解决。
-
如果是,故障排查结束。
-
如果否,更改标定位置,重新进行标定。
-
进行手动手眼标定时,出现移动距离不符报错
问题现象:
使用Mech-Vision软件进行手动手眼标定时,在“获取图像和位姿”步骤,出现移动距离不符报错。
影响版本:
所有Mech-Vision版本
解决方案:
检查手动输入的机器人法兰位姿是否正确。
-
如果是,请联系梅卡曼德技术支持。
-
如果否,重新输入机器人法兰位姿。
进行自动手眼标定时,出现移动距离不符报错
问题现象:
使用Mech-Vision软件进行自动手眼标定时,在获取图像和位姿步骤,出现移动距离不符报错。
影响版本:
所有Mech-Vision版本
解决方案:
该问题可以通过如下方法解决:
-
检查机器人精度是否存在问题(重点关注Z向)。
-
如果是,请提升机器人精度,主要涉及调整机器人零点、合理设置机器人负载和联系机器人厂家校准机器人精度。
-
如果否,执行第2步。
-
-
检查相机是否为V4相机。V4相机是指相机序列号第10位为4的相机。
-
如果是,执行第3步。
-
如果否,执行第4步。
-
-
检查不同高度下的相机内参,并保存拍到的标定板原始图像,恢复V4相机出厂内参(可能是错误的内参校正操作导致精度异常),然后确认问题是否解决。
-
如果是,故障排查结束。
-
如果否,使用Mech-Eye Viewer软件的内参工具检查并校正内参。
-
-
如果是V4系列之前的相机,确认相机内参是否超差。
-
如果是,使用Mech-Eye Viewer软件的内参工具检查并校正内参。如果问题未解决,执行第5步。
-
如果否,执行第5步。
-
-
确认相机安装方式是ETH还是EIH。
-
如果是ETH,使标定范围覆盖机器人工作区域,计算外参时勾选计算手眼系统补偿(需开启开发者模式)。如果问题未解决,请联系梅卡曼德技术支持。
-
如果是EIH,请联系梅卡曼德技术支持。
-
完成手眼标定后,标定结果差
问题现象:
成功完成了手眼标定后,标定结果较差,但标定板没有变形。
标定结果较差指在点云视图中查看到100%数据点的误差大于如下经验值。
-
UHP-140:±0.5mm
-
PRO S:±1mm
-
NANO ULTRA:±1.5mm
-
PRO M:±2mm
-
LSR L:±4mm
-
DEEP:±5mm
影响版本:
所有Mech-Vision版本
解决方案:
如果标定结果超出经验值不大,可以通过如下方法解决:
-
检查标定板是否晃动。
-
如果是,稳固标定板,并重新标定。
-
如果否,执行下一步。
-
-
检查机器人精度是否存在问题。
-
如果是,请提升机器人精度,主要涉及调整机器人零点、合理设置机器人负载和联系机器人厂家校准机器人精度。
-
如果否,执行下一步。
-
-
检查相机曝光参数是否合理。按照如下方式调整曝光参数。
-
关闭增益,使用单次曝光,适当设置3D曝光,以解决欠曝和过曝问题。欠曝和过曝除了会导致点云缺失外,也会导致点云波动变大,影响标定精度。
-
对于过暗场景:2D曝光可选择补光模式(实时、固定曝光)。
-
点云平滑模式选择:如果DEEP或LSR相机出现标定板点云波动大,导致标定结果较差。将点云平滑模式改为“strong”。
-
-
确认问题是否解决。
-
如果是,故障排查结束。
-
如果否,重新进行标定。注意将标定范围变得更小,防止机器人精度误差对外参结果造成过大影响。
-
如果标定方式为手动标定且标定结果超出经验值过大(例如仅15%数据点误差满足要求、旋转点标红),可以通过如下方法解决:
-
检查选择的相机安装方式是否正确(Eye to hand或Eye in hand)。如不正确,请修改。
-
检查选择机器人欧拉角类型是否正确。如不正确,请修改。
-
检查输入的机器人法兰位姿中Rx和Rz数值是否选错。如不正确,请修改。
-
检查左右手坐标系是否选错。如不正确,请修改。
-
检查输入的机器人法兰位姿是否正确。如不正确,请修改。
-
如果完成上述检查后未解决问题,请保存标定数据,然后联系梅卡曼德技术支持。
如果点云视图中个别标定点数据标红,可以通过如下方法解决:
-
检查标红的标定点是否处于相机视野边缘。
-
如果是,则说明标定范围不合适,手动删除标红的数据,并手动添加合理的标定点数据。
-
如果否,执行下一步。
-
-
检查相机曝光参数是否合理。按照如下方式调整曝光参数。
-
关闭增益,使用单次曝光,适当设置3D曝光,以解决欠曝和过曝问题。欠曝和过曝除了会导致点云缺失外,也会导致点云波动变大,影响标定精度。
-
对于过暗场景:2D曝光可选择补光模式(实时、固定曝光)。
-
点云平滑模式选择:如果DEEP或LSR相机出现标定板点云波动大,导致标定结果较差。将点云平滑模式改为“strong”。
-
-
确认问题是否解决。
-
如果是,故障排查结束。
-
如果否,请联系梅卡曼德技术支持。
-
完成手眼标定后,手眼标定结果验证为不合格
问题现象:
在完成手眼标定后,验证了标定结果。但是标定结果不合格,具体表现为:
-
在场景视图中查看机器人的点云与机器人模型的重合度,发现机器人模型与机器人点云存在较大偏差。
-
对于EIH标定,在场景视图中查看标定板点云相对于固定点的偏移量,发现标定板点云相对于固定点有明显偏移。
影响版本:
所有Mech-Vision版本
解决方案:
如果EIH标定后验证标定结果发现标定板点云相对于固定点偏移不明显,请参考“完成手眼标定后,标定结果差”解决。如果现标定板点云相对于固定点有明显偏移,可以通过如下方法解决:
-
确认相机是否存在Offset。
-
如果是,恢复单位阵。
-
如果否,执行下一步。
-
-
确认机器人是否在滑轨上。
-
如果是,执行第3步。
-
如果否,执行第4步。
-
-
确认机器人法兰位姿是否耦合外部轴值。
-
如果是,多角度验证位置,确认滑轨是否处于同一位置。
-
如果是,执行第4步。
-
如果否,将滑轨移动到标定位置并重新进行标定。如果未解决,执行第4步。
-
-
如果否,缩小标定范围,并进行重新标定。
-
-
确认机器人是否为四轴机器人。
-
如果是,执行第5步。
-
如果否,执行第6步。
-
-
确认标定板点云显示位置和真实位置在Z方向是否存在误差。
-
如果是,调整外参Z值。
-
如果否,确认Mech-Vision和Mech-Viz的兼容模式状态不一致(例如Mech-Vision兼容模式,Mech-Viz不是兼容模式)。如果不一致,请确保两个软件兼容模式状态一致。
-
-
确认标定和触发拍照是否为同一TCP位姿。
-
如果是,检查是否重新加载外参文件。
-
如果否,执行下一步。
-
-
检查机器人程序触发拍照是否是使用法兰位姿。
-
如果是,检查标定配置是否使用的法兰位姿。如果不是,请使用法兰位姿进行重新标定。
-
如果否,修改机器人触发拍照配置使用法兰位姿。
-
如果ETH标定后验证标定结果发现机器人点云与偏差机器人模型不大,请参考“完成手眼标定后,标定结果差”解决。如果机器人模型与机器人点云存在较大偏差,可以通过如下方法解决:
-
确认相机是否存在Offset。
-
如果是,恢复单位阵。
-
如果否,执行下一步。
-
-
确认机器人是否在滑轨上。
-
如果是,执行第3步。
-
如果否,执行第5步。
-
-
确认机器人法兰位姿是否耦合外部轴值。
-
如果是,将外部轴值解耦,然后使用机器人坐标系进行手眼标定。
-
如果否,多角度验证位置,确认滑轨是否处于同一位置。如果是,执行第4步。如果否,将滑轨移动到标定位置并重新进行标定。如果未解决,请联系梅卡曼德技术支持,并告知已排查的项。
-
-
确认机器人是否为四轴机器人。
-
如果是,执行第5步。
-
如果否,执行第6步。
-
-
确认标定板点云显示位置和真实位置在Z方向是否存在误差。
-
如果是,调整外参Z值。
-
如果否,确认Mech-Vision和Mech-Viz的兼容模式状态不一致(例如Mech-Vision兼容模式,Mech-Viz不是兼容模式)。如果不一致,请确保两个软件兼容模式状态一致。
-
-
确认标定起始点和触发拍照点是否为同一TCP位姿。
-
如果是,检查是否重新加载外参文件。
-
如果否,执行下一步。
-
-
检查机器人程序触发拍照时是否使用法兰位姿。
-
如果是,检查标定配置是否使用法兰位姿。如果不是,请使用法兰位姿进行重新标定。
-
如果否,修改机器人触发拍照配置使用法兰位姿。
-