坐标系
本节介绍机器人视觉与运动中坐标系的基本概念和常用类型,是理解机器人运动规划、视觉引导与工件定位的基础。
坐标系是用于描述物体在三维空间中位置和姿态的参考系统。通常采用三维直角坐标系表示物体的空间位置。坐标系由X、Y、Z三轴组成,三轴两两垂直。空间中点的位置可通过坐标 (x, y, z) 表示。
机器人坐标系
机器人坐标系即机器人厂家定义的机器人基坐标系,通常用于描述机器人法兰及末端工具的位置。该坐标系通常是机器人示教器中的默认坐标系,是视觉系统部署和路径规划的参考基础。
| 该坐标系是 Mech-Viz 软件内机器人工具位姿的基准坐标系,在机器人默认固定不动的状态下与世界坐标系重合。 |
机器人坐标系的位置由各厂家自行定义,不同厂家的机器人坐标系位置可能有所不同,部分常见厂家的坐标系位置如下:
-
ABB:位于机器人底座下方
-
FANUC:位于二轴转轴平面位置
-
KAWASAKI R 系列:位于二轴转轴平面位置,其余型号位于底座下方
-
KUKA:位于底座下方
-
YASKAWA:位于二轴转轴平面位置
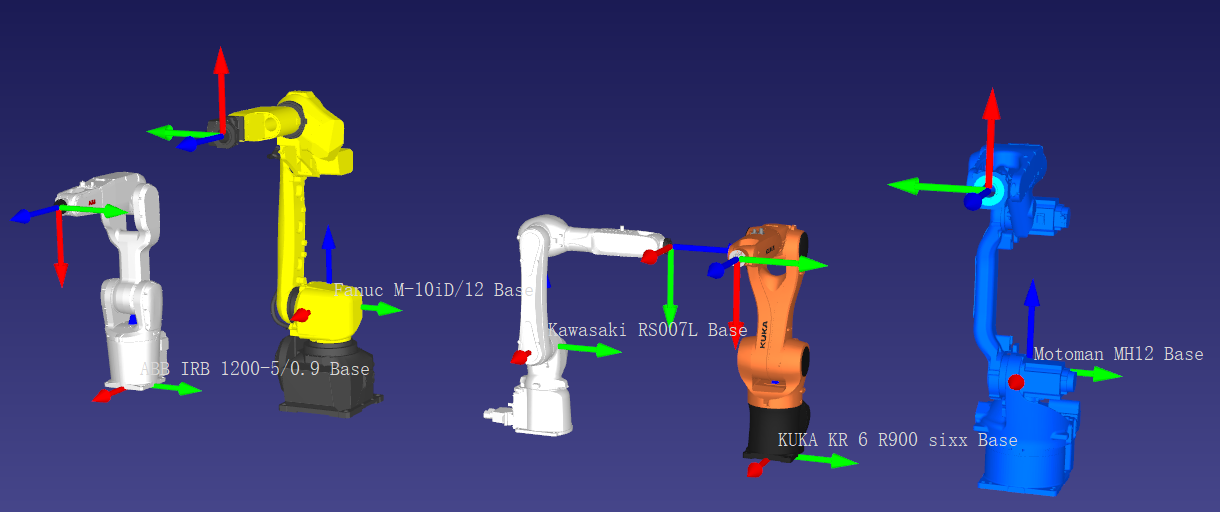
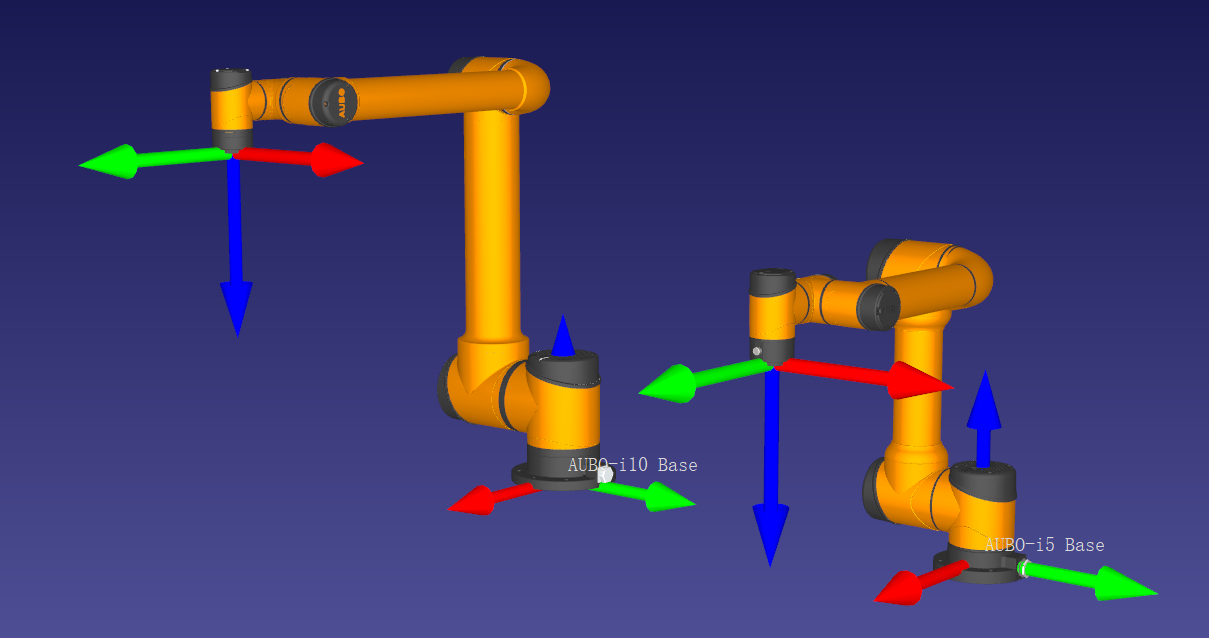
此外,某些型号的坐标系位置可能位于底座上方,如 AUBO i5 及部分大族机器人,其坐标系距底座约 2 mm~1 cm。
不同厂家的机器人坐标系轴方向也存在差异,例如:
-
ABB、FANUC、KUKA、YASKAWA:X 轴(红色箭头)指向机器人前方
-
KAWASAKI:Y 轴(绿色箭头)指向机器人前方
| 在部署视觉系统时,建议先确认机器人控制器中使用的坐标系是默认坐标系,还是用户自定义的其他坐标系,再进行视觉系统的配置。此外,由于各厂家对坐标系的定义存在差异,可能导致机器人示教器上的工具位姿数值与 Mech-Viz 中的数值不一致。项目入场后,建议比对工具位姿,若存在差异,可在 Mech-Viz 的工程资源树中,右键单击机器人名称,选择打开机器人文件目录,并修改[robot]_algo.json文件中的相关参数。 |
相机坐标系
相机坐标系是由相机厂家定义的坐标系,用于描述相机视野内物体相对于相机的位置与方向。该坐标系常用于外参标定,以建立相机与机器人坐标系之间的空间关系,从而支持视觉引导和路径规划。
梅卡曼德工业级 3D 相机的坐标系原点通常位于主 2D 相机光心位置。其坐标系的轴方向定义为:Z 轴与相机的光轴重合,垂直于成像平面,指向成像方向;X 轴 与 Y 轴平行于成像平面,方向符合右手法则。

工件坐标系
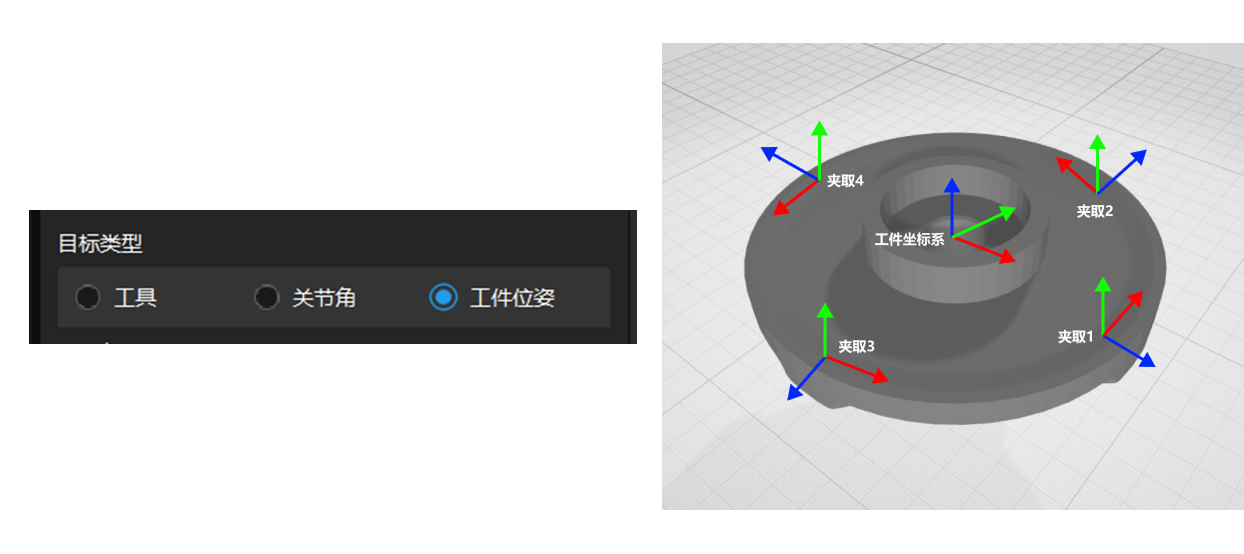
工件坐标系是工件的基准坐标系,用于描述工件在空间中的位置和方向。与机器人坐标系和相机坐标系不同,工件坐标系通常由用户根据工件的几何特征和和任务需求自行定义原点位置,以适应抓取、放置和对称性处理等应用场景。
| 在 Mech-Viz V1.8.0 及之前版本中,工件坐标系原点通常由工件中心点(geocenter)定义。 |
- (工件)抓取点
-
工件坐标系下可以定义一个或多个抓取点,抓取点由 Mech-Vision 输出。抓取工件时,机器人将工具中心点(TCP)移动到抓取点所在位置,使二者原点、X轴重合,Y轴、Z轴方向相反,实现精确抓取。
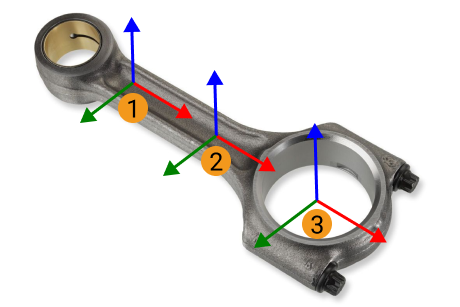
其中:①、②为杆柄抓取点,③为环心抓取点。
- 工件位姿放置
-
在 Mech-Viz 中以工件位姿进行放置时,机器人会将工件坐标系对齐空间中设定的目标点进行放置。即工件坐标系也是以工件位姿放置时的基准点。
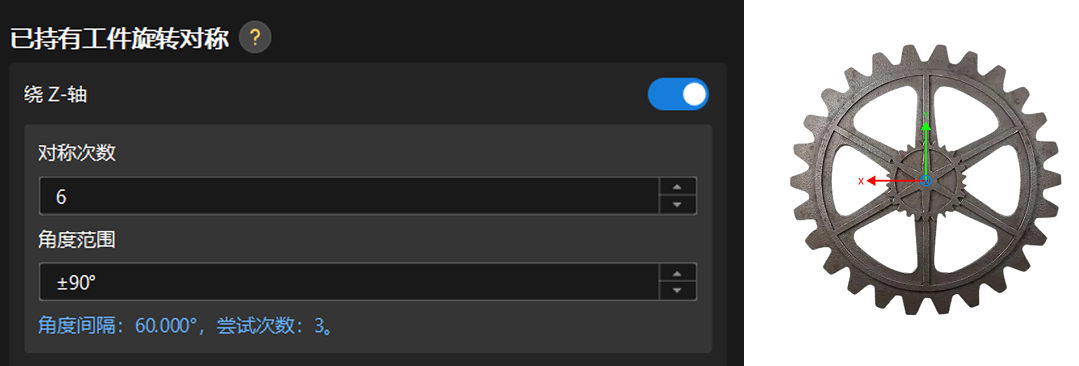
- 工件旋转对称
-
当工件具有旋转对称性时,对称旋转的中心通常设置为工件坐标系原点。用户可指定工件坐标系的某个坐标轴作为旋转轴。例如,齿轮每隔 60° 对称一次,其对称轴为工件坐标系 Z 轴。这一设置可用于自动生成旋转对称的抓取点。
工具坐标系
工具坐标系是定义在机器人末端工具上的坐标系,其原点通常位于工具中心点(tool center point, TCP)。
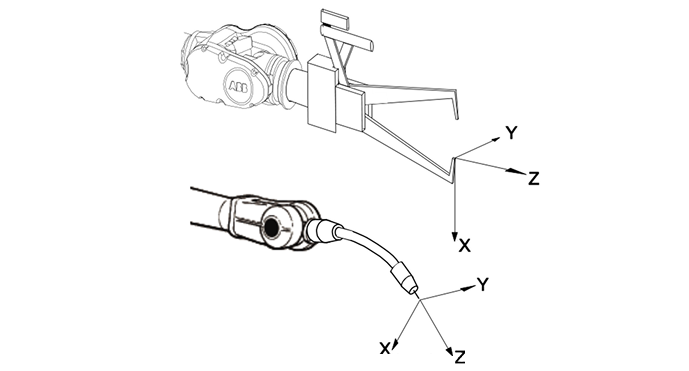
通过该坐标系,可以定义工具自身在机器人坐标系下的位姿(即工具位姿),同时也可定义已持有工件的工件坐标系相对于工具坐标系的位姿(即已持有工件位姿),从而用于抓取任务规划和视觉引导。