选择机器人
本节介绍如何选择机器人。
-
单击 Mech-Vision 工具栏中机器人通信配置。
-
选择机器人。
-
选择品牌机器人
-
单击选择机器人下拉框,选择品牌机器人,单击选择机器人型号。
-
在机器人品牌后的下拉框中,选择机器人品牌,右侧窗口会出现该品牌的所有机器人。

-
选择可动轴数、机器人负载、工作范围可将机器人范围进一步缩小。
-
在搜索框中,输入机器人品牌和型号(英文不区分大小写),也可筛选机器人。单击
 按钮可以清除输入框中的内容。
按钮可以清除输入框中的内容。
若在机器人库未找到所需的机器人,则关闭该窗口,参考 《导入机器人》 进行操作完成后,再执行此处操作。
-
-
鼠标悬停于右侧待选择的机器人上会显示灰白色边框和选择按钮,单击该按钮,然后关闭窗口。
-
单击下一步,进入配置通信界面。
-
-
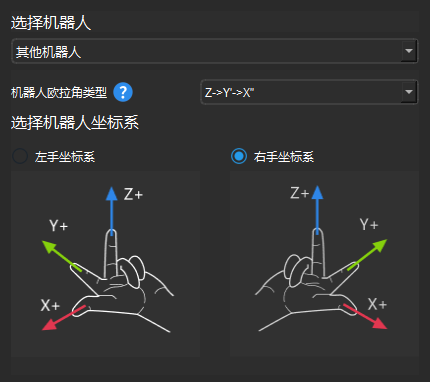
选择其他机器人(例如桁架机器人)
-
单击选择机器人下拉框,选择其他机器人。
-
选择机器人欧拉角类型。
-
选择机器人坐标系。
-
单击下一步,进入配置通信界面。
-
-
选择不使用机器人(无机器人场景,例如测量)
-
单击选择机器人下拉框,选择不使用机器人。
-
单击下一步,进入 Adapter 通信配置界面。
-
-
|
选择不使用机器人后,通信方式只能选择 Adapter 通信。 |