相机安装要求
相机常见的安装方式有两种,分别为 Eye to hand(ETH)和 Eye in hand(EIH),你可根据相机与机器人的相对位置及整体节拍需求进行选择,其安装特点和优势如下表所示。
安装方式 |
Eye to hand(ETH) |
Eye in hand(EIH) |
|---|---|---|
特点 |
相机安装于独立的相机支架上。 |
相机安装于机器人末端,随机器人一同运动。 |
示意图 |
|
|
优势 |
|
|

此外,不同安装方式对相机支架的安装和线缆布线等有不同的要求,具体如下。
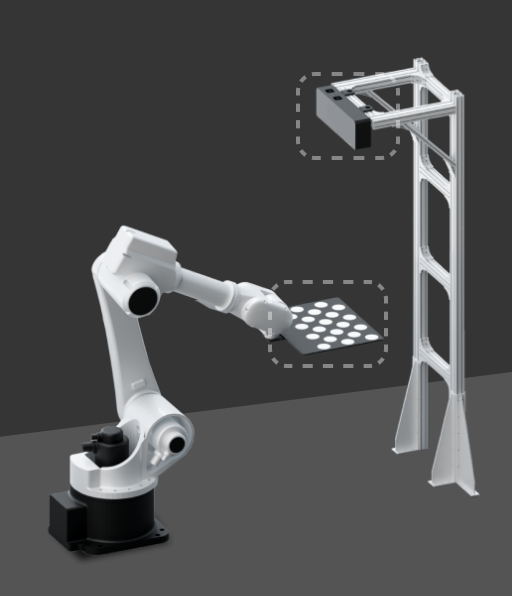
相机安装要求(ETH)
将相机安装于独立的相机支架时,需考虑稳定性、可靠性和线缆布线,确保图像采集的准确性。具体注意事项如下:
-
相机支架的固定
可以选择膨胀螺栓或化学螺栓将相机支架固定在地面,墙面等可以提供稳定可靠支撑的位置,确保相机不会晃动。
地脚螺栓的数量和型号取决于支架的高度和结构形式。对于非地面的安装方式,相机支架可能需要依靠侧墙、地面或天花板进行加固,如下图所示。

-
相机线缆布线
将相机线缆安装在立柱表面布置的线槽内,以便整齐地走线。这样既可以保证线缆的安全性、美观性,又能方便检修。
-
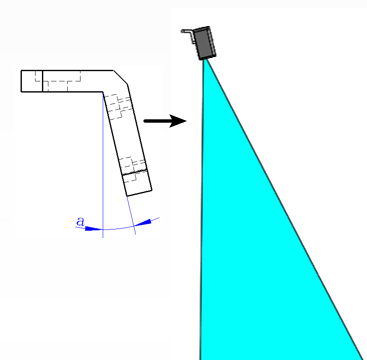
相机安装角度调整
通常情况下,相机垂直朝下安装。但对于顶高受限的项目现场,可以考虑倾斜相机的方式来改善安装角度。但在项目设计初期,建议进行模拟和仿真测试,以确保倾斜相机的角度符合实际需求。
-
相机视野检查
-
相机的有效成像视野
相机的有效成像视野指相机能够采集到完整点云数据的物理区域,须确保:
-
来料载具(料筐/托盘)及其内部工件完全处于该视野内。
-
该区域内无任何结构物(如护栏、管道、机器人本体、夹具等),以免造成遮挡或点云缺失。
重点检查项包括:
-
来料最大尺寸(含堆叠高度)是否在相机有效成像视野范围内。
-
是否预留足够的余量(建议四周 ≥150~200mm),以兼容来料位置偏差。
-
相机安装高度与工作距离是否匹配,避免因距离过远导致视野不足。
-
-
相机的安全扫描视野
相机的安全扫描视野虽然不直接参与成像,但在某些应用场景下,需确保:
-
相机支架本身不会阻挡机器人路径或影响抓取姿态。
-
-
|
由于相机安装后位置不可调整,因此在将相机固定到支架前,需确保视野覆盖整个作业区域。 |
|
建议使用梅卡曼德提供的3D相机选型工具和Mech-Viz进行仿真验证,提前发现潜在的相机视野遮挡问题。 |
相机安装要求(EIH)
在将相机安装于机器人末端时,需注意如下事项:
-
相机支架安装
相机支架安装应该做防松处理,例如使用螺纹胶涂抹安装螺栓、使用防松垫片等。
-
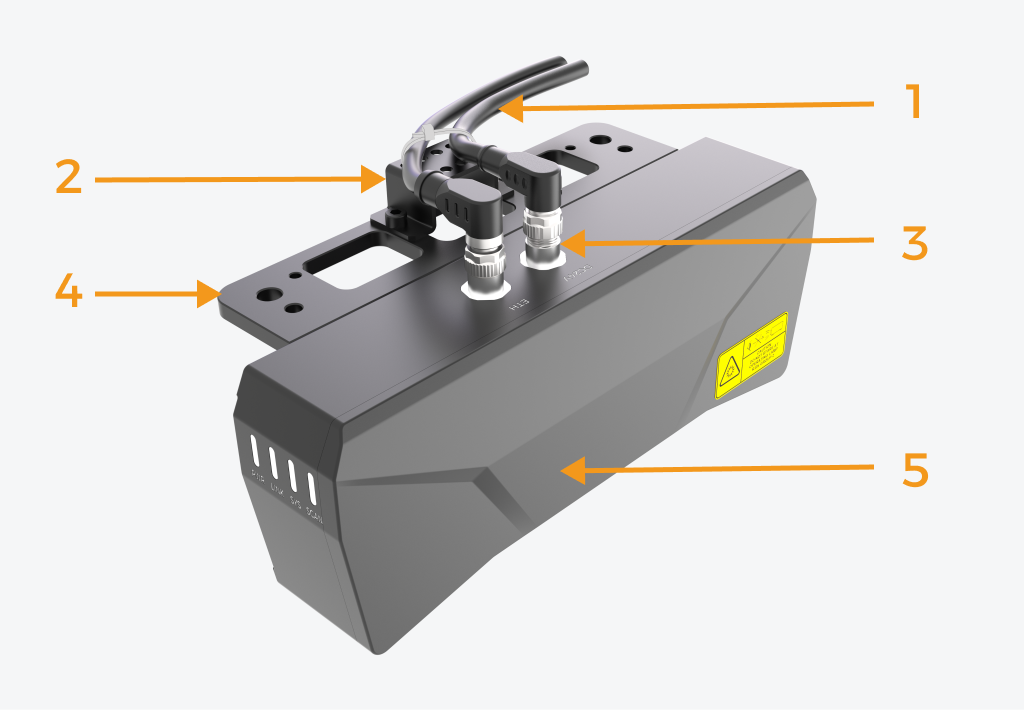
线缆固定方式
必须对接头附近的线缆进行固定,防止相机接头受力。捆扎线缆时考虑机器人末端法兰的旋转余量,避免放线不足导致相机线缆拉扯,甚至对相机线缆接头造成不可逆的损坏。线缆固定方式如下图所示:1-相机线缆、2-线缆固定架、3-线缆接头、4-L型转接件、5-相机本体。
-
线缆布线
应合理安排线缆的走向,避免管线包中线缆过长或者过短。下图所示为线缆过长的错误示例。

-
线缆保护
需采用管线包对线缆进行保护,且需注意如下事项:
-
管线包不得采用自卷式包线管或包线布。
-
管线包选择标准成套波纹管配件(包括但不限于:管线包固定座、内夹、摩擦球等)。
-
管线包和线缆应分别做好固定和装配,防止在机器人运动过程中线缆受附加力矩。

-
-
相机视野检查
-
相机的有效成像视野
相机的有效成像视野指相机能够采集到完整点云数据的物理区域,须确保:
-
来料载具(料筐/托盘)及其内部工件完全处于该视野内。
-
周围无任何结构物(如护栏、管道、机器人本体、夹具等)进入该区域,以免造成遮挡或点云缺失。
重点核查项:
-
来料最大尺寸(含堆叠高度)是否在相机有效成像视野范围内。
-
是否预留足够的余量(建议四周 ≥150~200mm),以兼容来料位置偏差。
-
相机安装高度与工作距离是否匹配,避免因距离过远导致视野不足。
-
-
相机的安全扫描视野
相机的安全扫描视野虽然不直接参与成像,但在某些应用场景下,需确保:
-
机器人运动过程中,相机不会碰到周边设备或工件。
-
夹具开合时,不会产生相机盲区或碰撞风险。
-
-
|
由于相机随机器人移动,所以需确保所有拍照点无障碍。 |
|
建议使用梅卡曼德提供的3D相机选型工具和Mech-Viz进行仿真验证,提前发现潜在的相机视野遮挡问题。 |