Online
파렛트 패턴 설정
낙하 방식으로 배치
낙하 방식으로 배치 가능
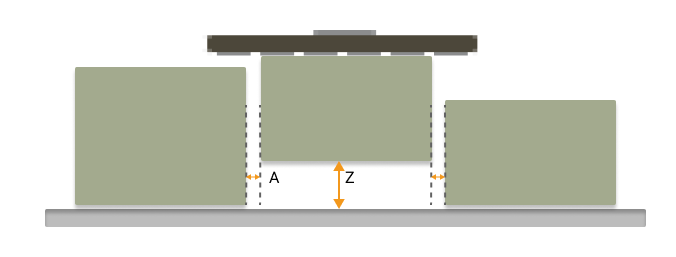
이 옵션을 선택하면 피킹된 상자가 Z 방향으로 배치 위치에서 일정 거리 떨어져 있을 때 직접 낙하 방식으로 배치될 수 있습니다.
두 개의 큰 상자 사이에 작은 상자를 넣거나 상자가 서로 밀착하게 붙어 있는 경우 상자를 낙하 방식으로 배치하여 충돌 위험을 최소화할 수 있습니다.
낙하 높이 |
물체가 낙하 방식으로 배치될 때 Z 방향의 높이(단위: mm)입니다. |
낙하 위치의 안전 거리 |
배치할 상자 측면과 인접한 상자 사이의 최소 거리(단위: mm)입니다. |
아래 그림에 표시된 바와 같이 Z 값은 “낙하 높이”이고 A 값은 “낙하 위치의 안전 거리”입니다.
상자 치수를 업데이트하기 위해 이미지를 재차 캡처하기
기본적으로 선택하지 않습니다. 카메라의 시야가 모든 시나리오 정보를 한 번의 캡처로 다 획득할 만큼 크지 않고 시나리오 융합을 위해 다시 캡처가 필요한 경우 이 파라미터를 선택합니다.
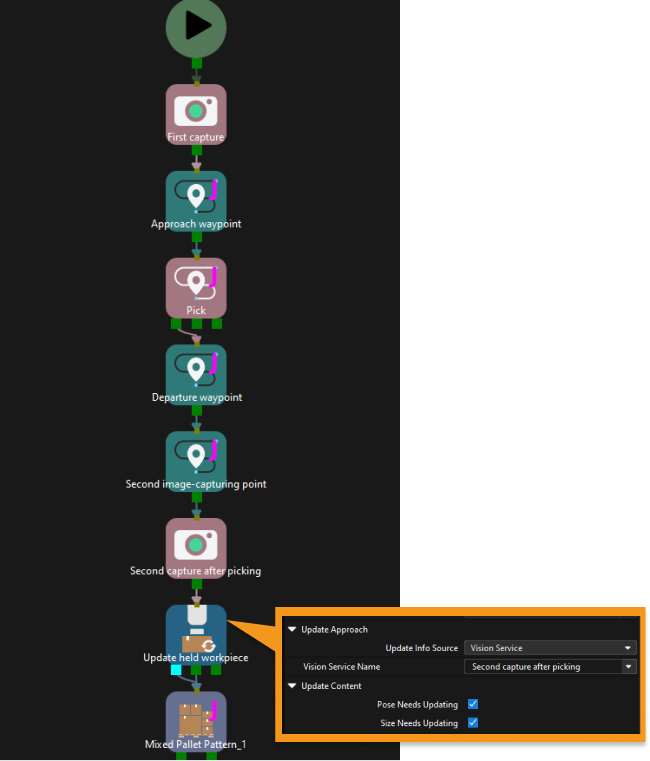
“비전 이동” 스텝을 사용하여 상자를 이미 피킹했지만 상자의 높이 정보를 얻지 못하는 경우, “혼합 팔레타이징” 스텝은 배치 위치와 가중치를 계산할 때 상자의 높이를 추정하고 소프트웨어는 추정된 높이에 따라 계획을 수행할 수 있습니다. 이미지를 다시 캡처하여 상자 높이 정보를 얻은 후 "혼합 팔레타이징" 스텝에서는 비전 시스템에서 인식한 상자의 실제 치수를 기반으로 다시 계획을 수행합니다.
| 이 기능은 “피킹된 물체를 업데이트하기” 스텝과 결합해서 사용되어야 합니다. |
아래 그림과 같이 로봇은 이미지 캡처 포인트로 상자를 피킹하여 이미지를 다시 캡처하며 상자의 포즈와 치수 정보는 "피킹된 물체를 업데이트하기" 스텝에 의해 업데이트됩니다.
후보 위치의 수량 제한
후보 위치의 총 수량 제한
이 파라미터는 후속 경로 계획의 속도를 높이기 위해 시도한 총 위치수(상자를 배치하기 위해 시도한 수)를 제한하는 데 사용됩니다. 예를 들어, 로봇이 시도할 수 있는 후보 위치가 총 20개가 있지만 그 중 배치 가능한 위치가 하나도 없을 경우, 후보 위치의 수량 제한을 설정하지 않으면, 소프트웨어는 20개 후보 위치에 대한 계획을 모두 완료해야 실행이 중지될 수 있습니다. 이때 후보 위치의 수량 제한을 5로 설정하면, 로봇은 5번의 계획을 완료한 후 중지할 수 있어 계획 시간을 효과적으로 단축할 수 있습니다. 이 파라미터의 값을 적절하게 줄이면 계획의 정확성을 보장하면서 계획 효율성을 높일 수 있습니다.
이 파라미터의 값이 -1로 설정되면 후보 위치 수에 제한이 없음을 의미합니다.
후보 위치를 찾기 위한 파라미터
상자 초과 비율 상한
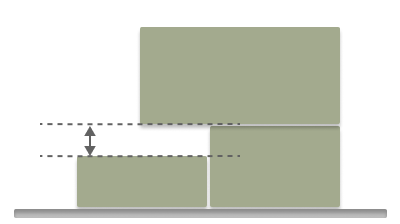
이 파라미터는 위에 올려진 상자가 아래 깔려진 상자 평면의 길이를 초과할 수 있는 최대 상한을 설정할 수 있습니다.
측면도 |
|
|
|
1: 위에 올려진 상자의 길이 |
2: 위에 올려진 상자가 아래 깔려진 상자 평면을 초과한 길이 |
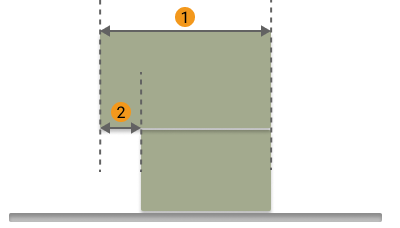
상자 초과 비율 = ②/①
샘플링 속도
상자 위치를 계획할 때의 샘플링 속도입니다. 이 파라미터의 값이 높을수록 계산된 파렛트 패턴이 더 정확해지지만 계산 속도는 느려집니다. 권장 값: 200, 500, 1000.
평면 진입 각도
하향식 보기에서 상자 진입 경로와 인접한 상자 측면 사이의 각도입니다.
부감도 |
|
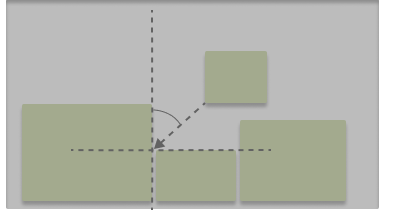
설정한 값이 너무 크면 팔레타이징 후 U자 모양의 공백 영역이 생길 수 있습니다. 반면, 설정한 값이 너무 작으면 피킹된 상자를 배치할 때 인접한 상자와 충돌이 발생할 수 있습니다.
권장값: 15°~30°.
중간점 사용 시의 안전간격
배치 가능한 중간점 위치에 상자를 놓을 때 양쪽에 남아야 할 간격(단위: mm)을 가리킵니다.
로봇 동작 오차 및 상자 치수 오차가 허용된 범위 내에 있을 경우, 이 파라미터를 설정된 “간격 넓이”보다 작은 값으로 설정할 수 있습니다. 이는 “Online” 모드에서 작동할 때 작업의 유연성이나 효율성을 크게 향상시킬 수 있습니다. 특히 상자를 상자 사이에 배치할 경우, “안전간격”이 설정된 “상자 간의 최소 간격”보다 크면 계획 결과가 나오지 않습니다. “중간점 사용 시의 안전간격”의 값이 작을수록 가능한 배치 포즈가 많습니다.