Kawasaki Setup Instructions
This guide shows you how to set up Master-Control communication with a YASKAWA robot.
Set up the Network Connection
Connect the Hardware
Use an Ethernet cable (prepared by yourself) to connect the Ethernet ports on the IPC and that inside the accessory panel on the front of the controller.
There are two Ethernet ports provided by the CPU board of the robot controller. The IP addresses of the two ports should be on different subnets.

Set the IP Address
-
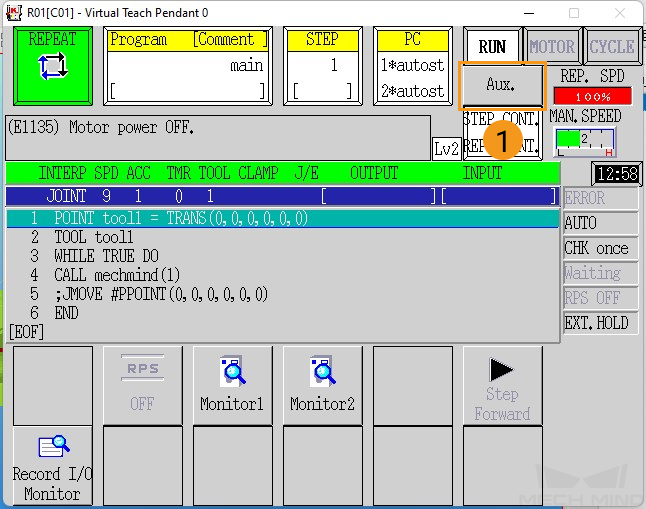
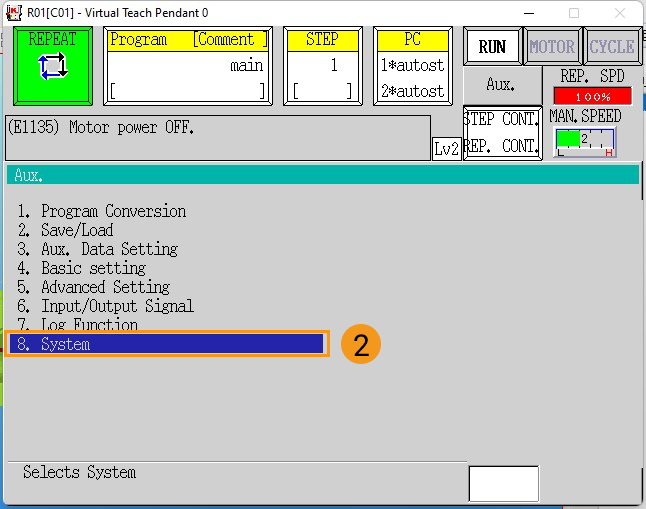
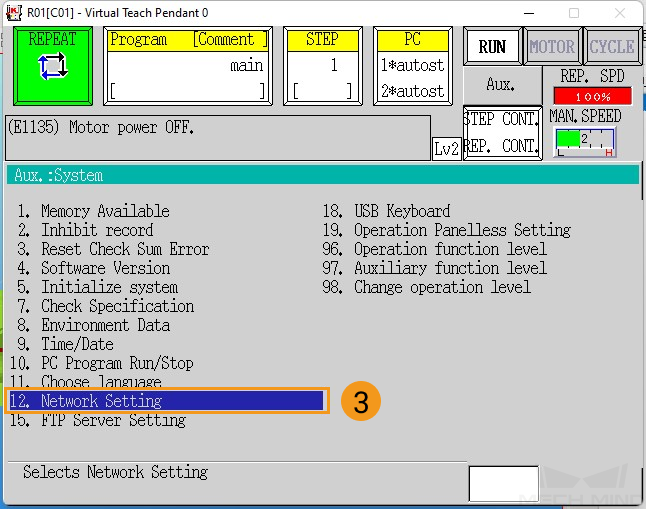
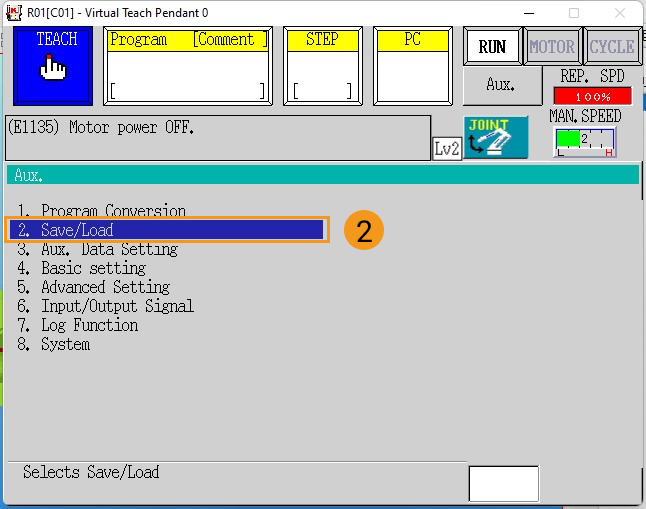
To set the IP address of the robot Ethernet port, press the Aux. button on the teach pendant, and then select .
-
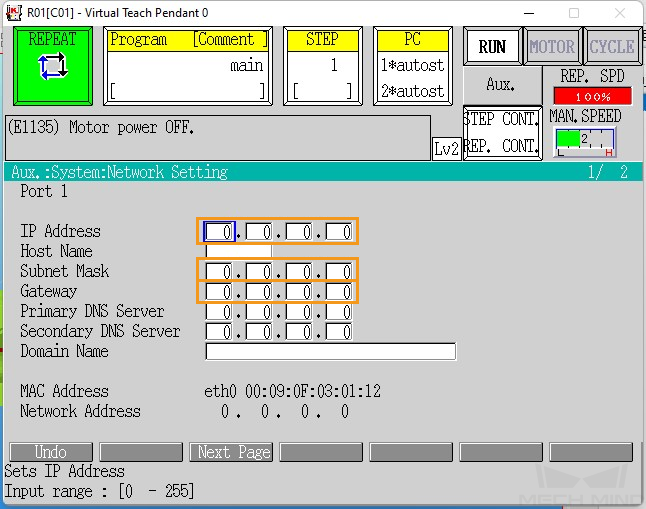
Set the IP address and subnet mask of port 1 on the Port 1 network setting page. The IP address of the robot must be on the same subnet as that IP address of the IPC’s Ethernet port. If a network gateway is used, set the Gateway parameter.
-
After the IP address is set, press the
ENTERbutton on the teach pendant, and then restart the controller.
Load the Program Files to the Robot
Prepare the Files
The program files are stored in the Mech-Center/Robot_Server/Robot_FullControl/kawasaki folder of the Mech-Mind Software Suite’s installation directory.
Copy the mm_control.as file to the USB flash drive.
Precautions for Loading Files
-
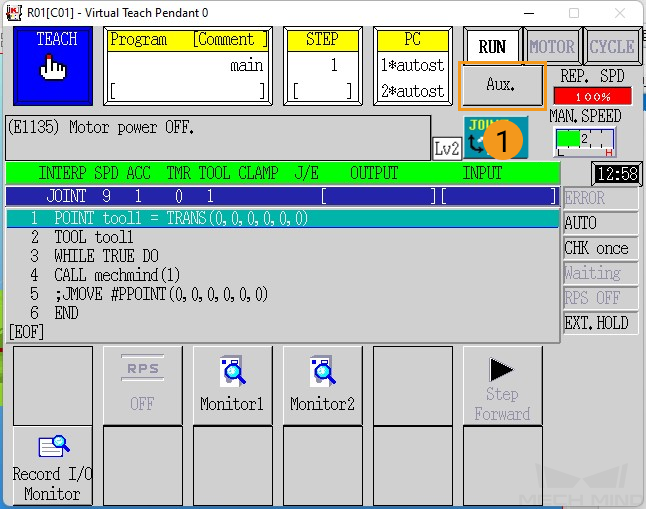
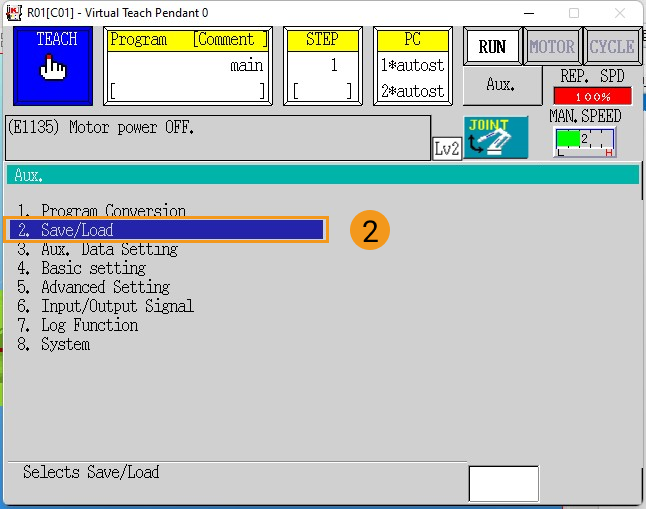
Save user programs.
If there are user programs in the program list on the teach pendant, save them before loading program files. If there are no user programs on the teach pendant, skip this step. Press the Aux. button, and then select .
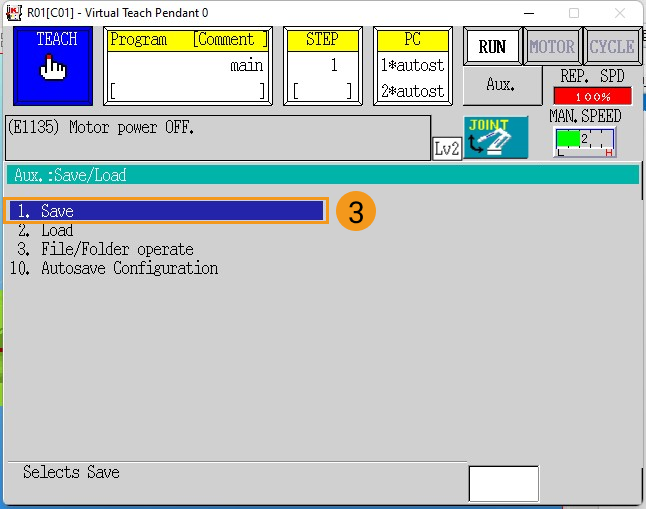
On the Save page, press Input File name to enter the file name, and then press the Save button. After the file is saved, press the
Rkey on the teach pendant to return to the main page.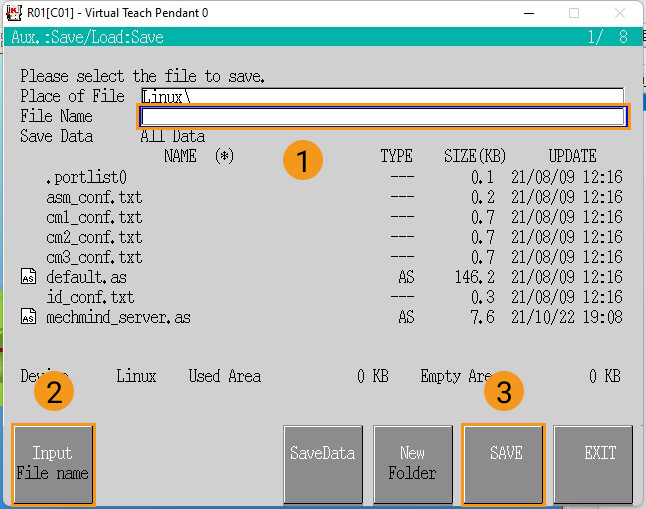
-
Exit the frontend and PC programs of the robot.
Before loading program files to the robot, make sure that all the frontend and PC programs of the robot have exited. Check the Program and PC areas on the teach pendant to make sure that no programs are listed. If there is any program, please kill it.
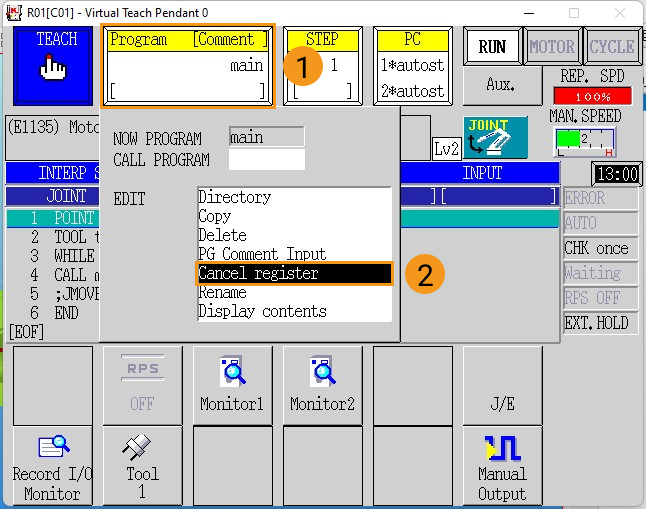
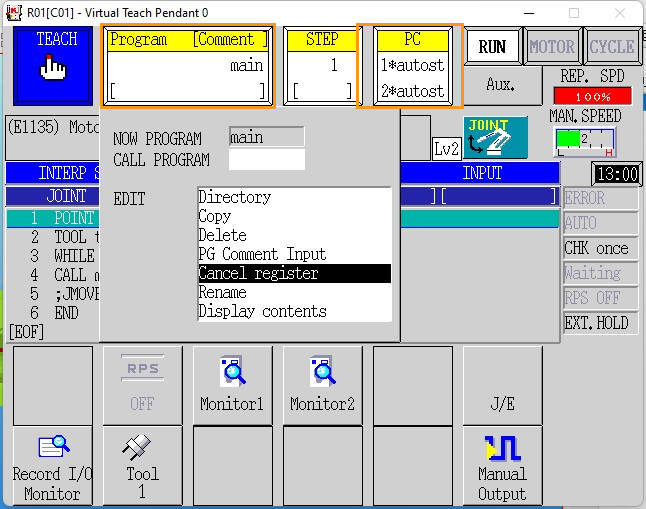
To kill a frontend program, press the Program area, and then press Cancel register** in the drop-down menu.
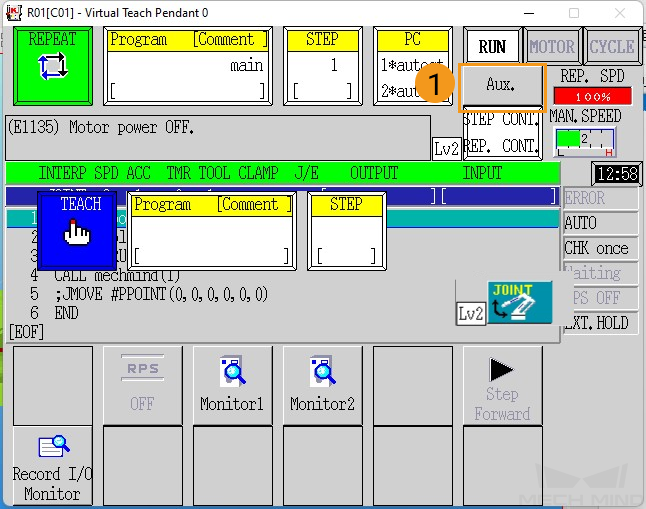
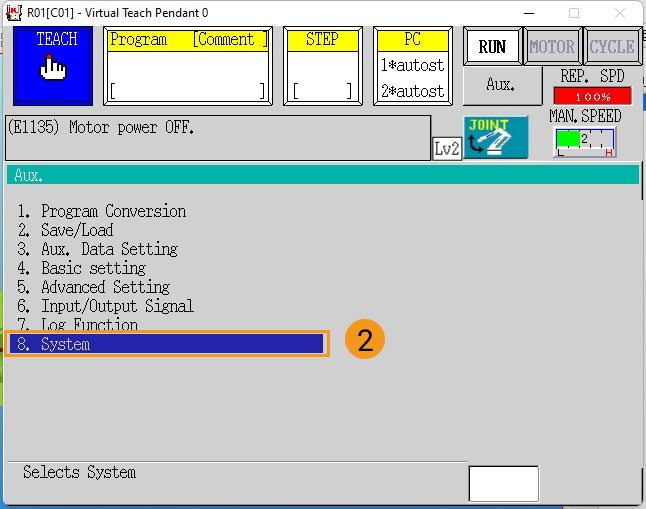
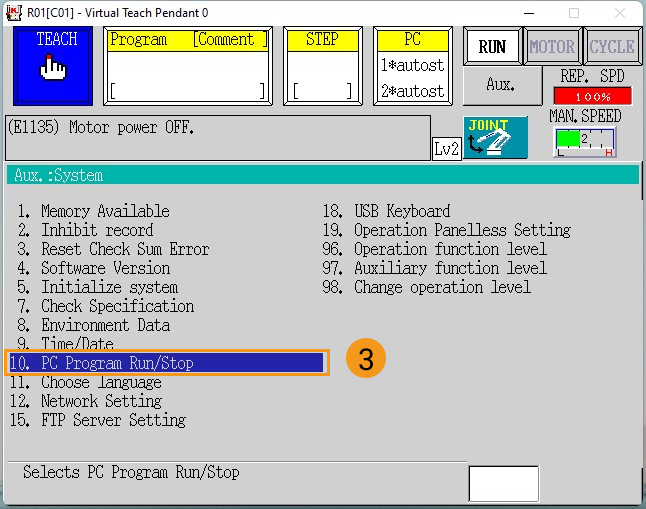
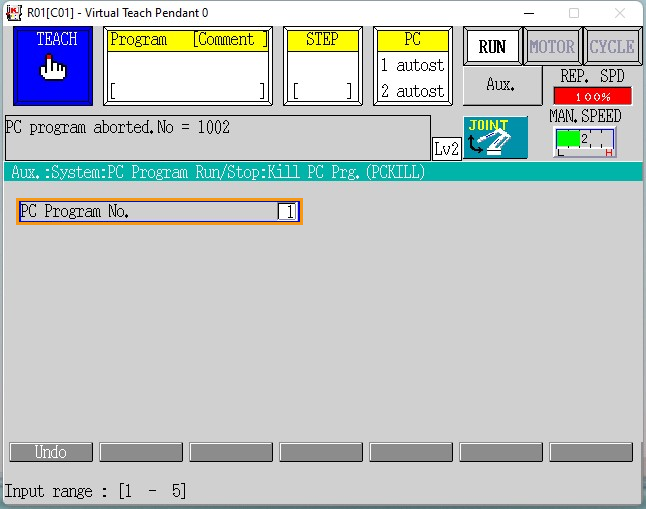
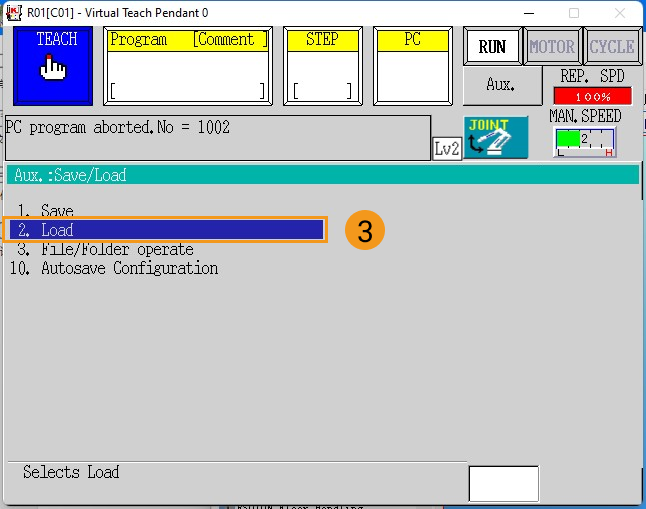
To kill a PC program, on the teach pendant, press the Aux. button, and then select .
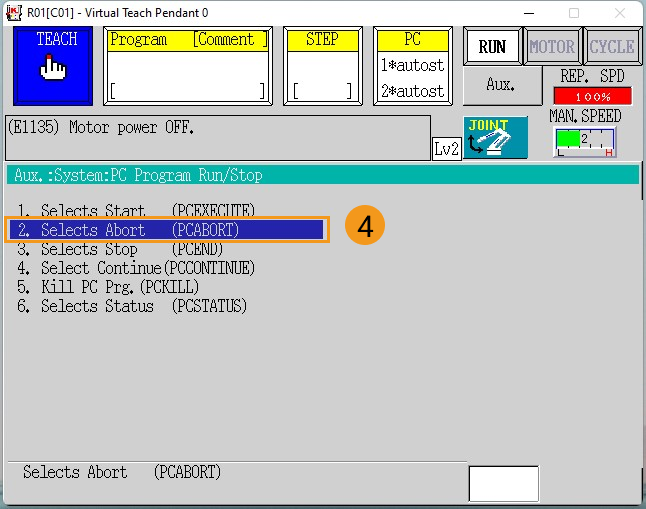
Press the
ENTERkey to abort PC program 1. Then, press 2 to change the program No. to 2, and press theEnterkey to abort PC program 2. At last, press theRto return to the previous page.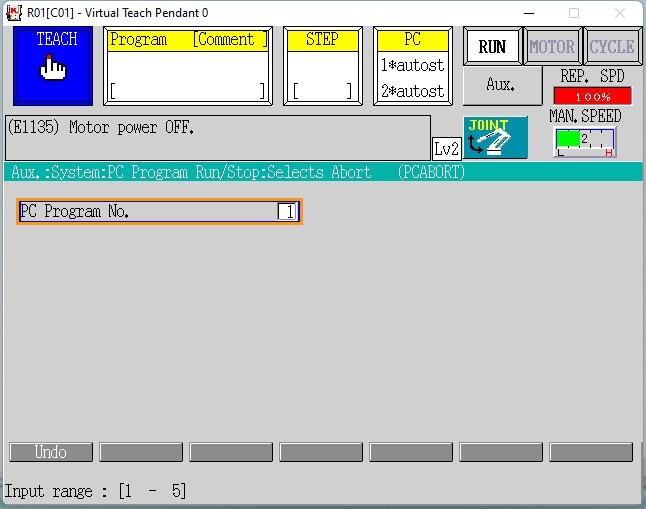
Select 5. Kill PC Prog., and then press the
ENTERkey to kill PC program 1. Then press 2 to change the PC program No. to 2, and press theENTERkey to kill PC program 2. At last, press theRto return to the previous page.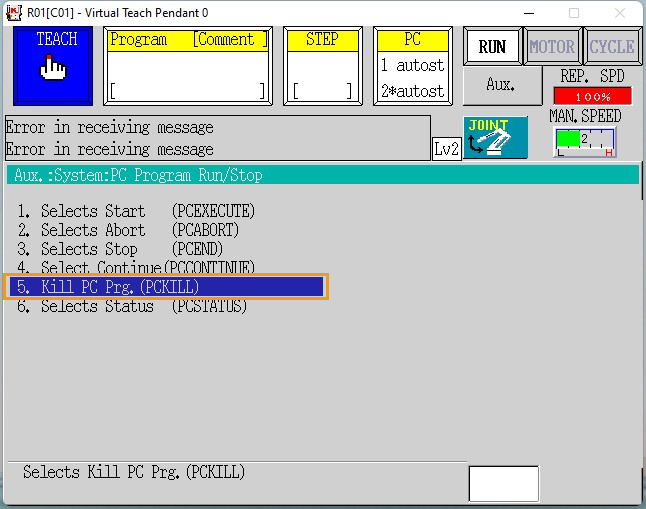
-
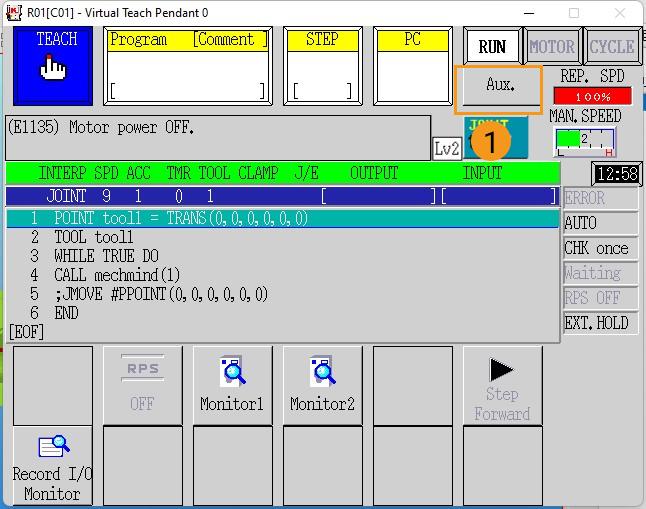
Make sure that the robot is in teach mode, and that the Program and PC areas have nothing listed, as shown below.
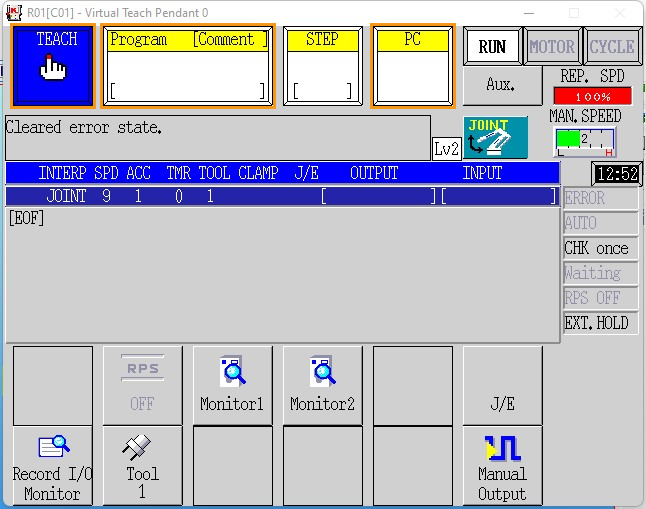
If there are still programs in the PC area, repeat preceding steps to kill them until there are no programs in the PC area.
Load the Program Files to the Robot
-
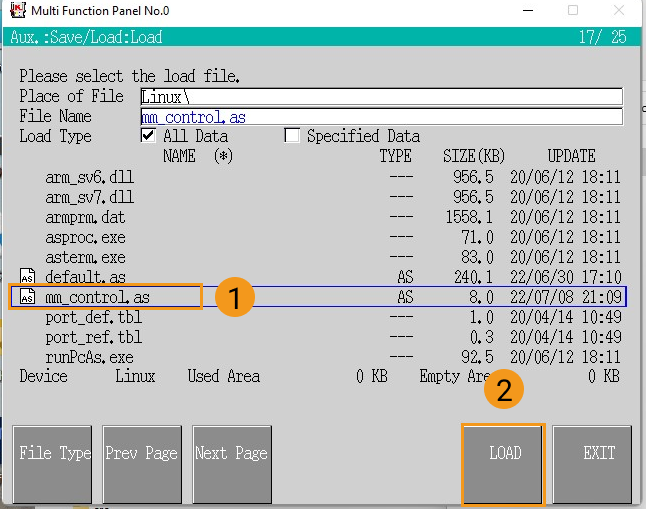
Insert the USB flash drive storing the program files to the USB port inside the accessory panel on the controller. Then on the teach pendant press Aux., and select .
-
Press mm_control.as in the file list twice to select it (mm_control.as displayed as the file name), and then press the LOAD button.
-
After the file is loaded, make sure no errors occurred during loading, and press on the
Rkey on the teach pendant to exit.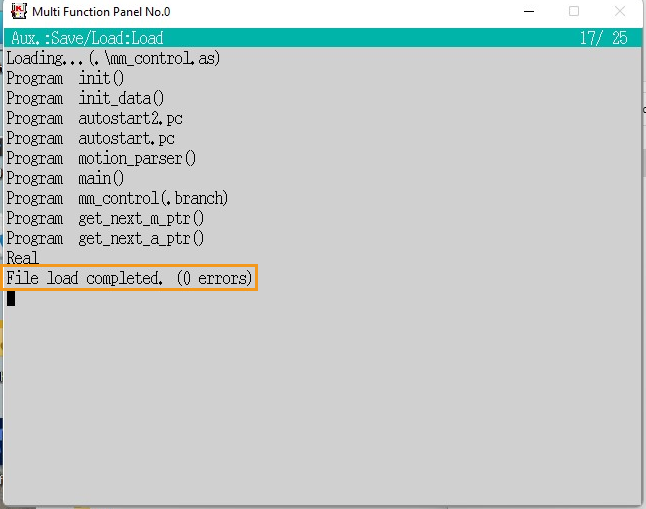
Further Configurations
-
Set the PC program to automatically start up.
Set the PC program to automatically start up after the robot program files have been loaded. Follow these steps:
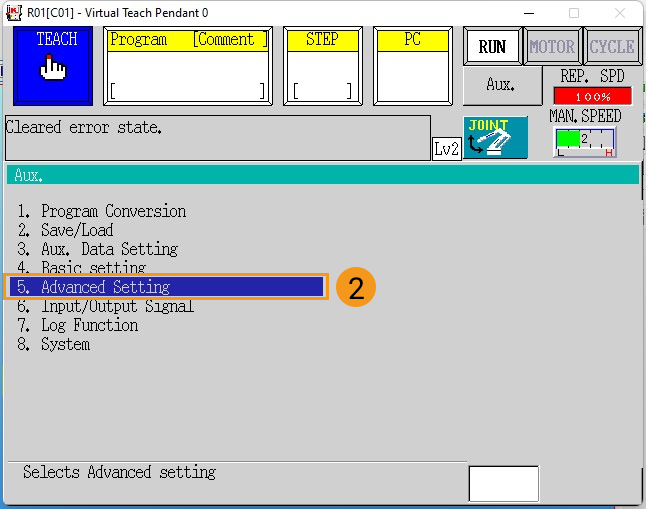
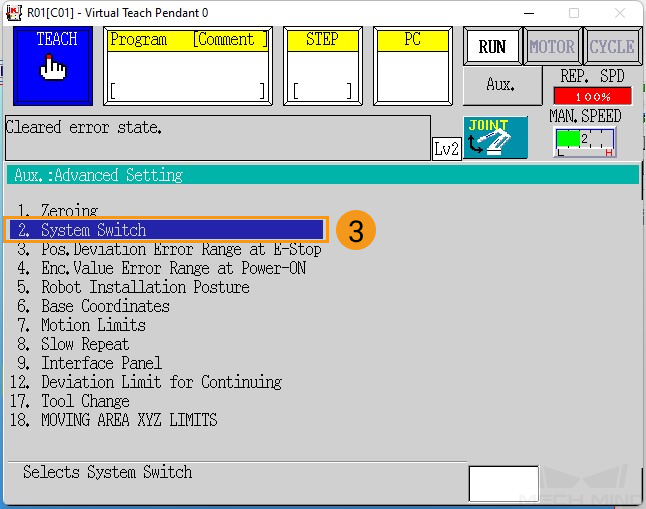
On the teach pendant, press the Aux. button, and select .
Press Next Page, find AUTOSTART.PC and AUTOSTART2.PC, select the Oncheckboxes of these two programs, and press the
ENTERkey on the teach pendant to save the changes.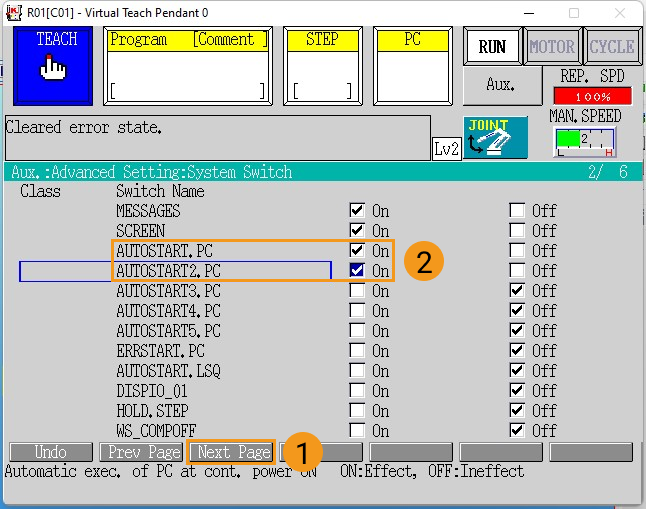
-
Select the frontend main program.
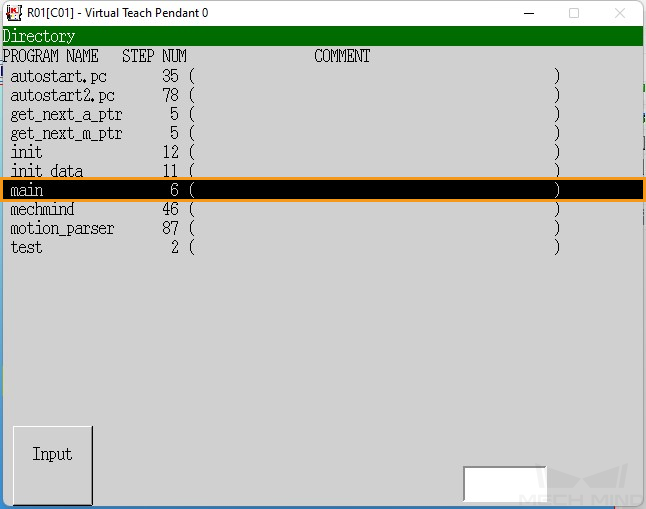
Press the Program area, and select Directory. Then select main and press the
ENTERkey on the teach pendant to save the changes. Make sure no other programs are listed in the PC area.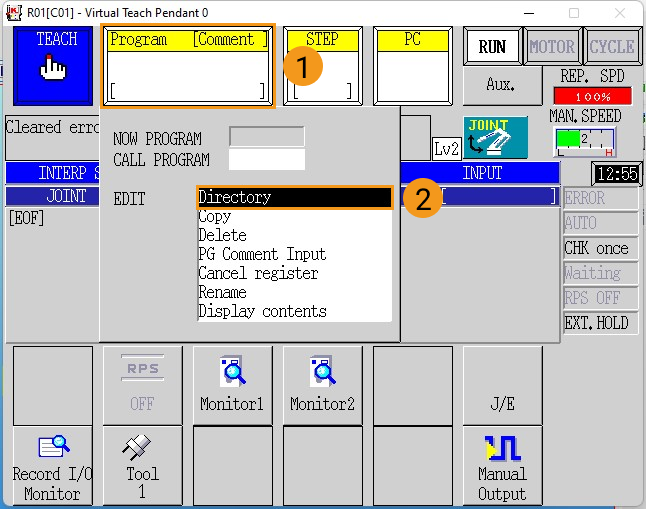
-
Switch the robot to repeat mode.
Switch Teach/Repeat on the controller to REPEAT, and switch the teach lock on the teach pendant to OFF. After these operations, the robot should be in the REPEAT mode.

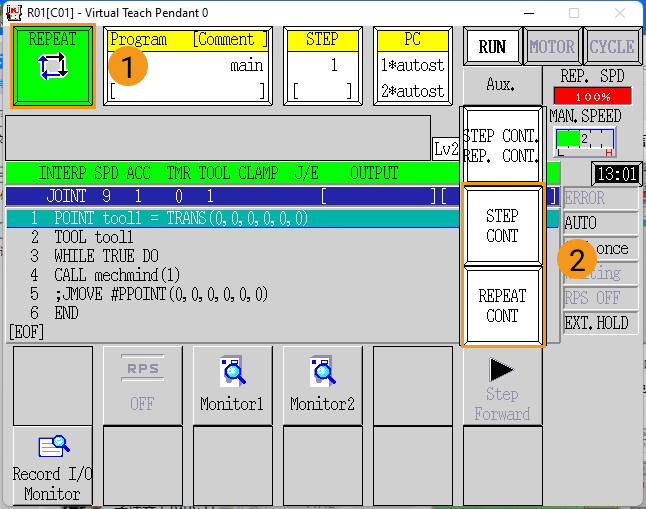
Then switch the program running mode to STEP CONT and REPEAT CONT.
-
Restart the robot controller.
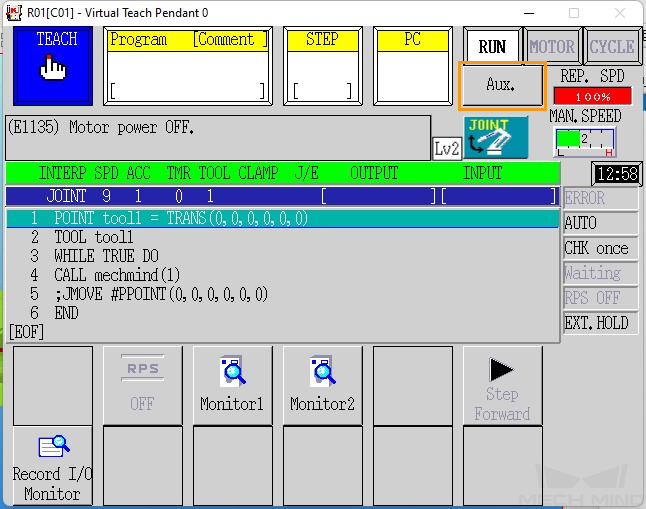
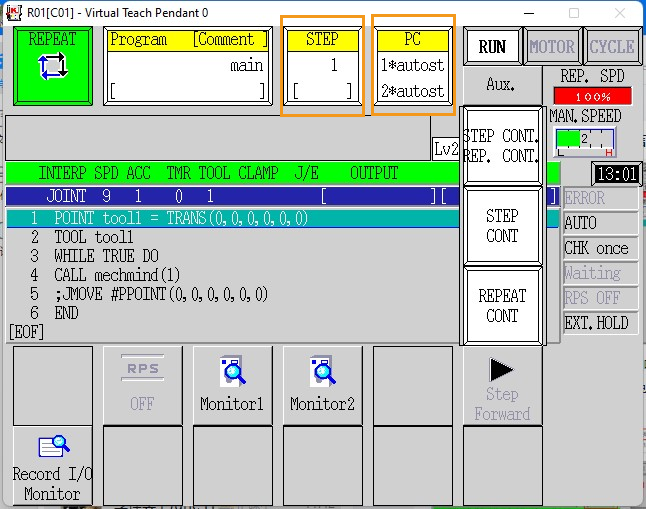
After the robot controller is restarted, the teach pendant should show the following interface. PC programs with asterisks (*) in front indicates the programs are running. If the running step is not 1 in the STEP area, modify it manually by pressing the STEP area and enter 1.
Test Robot Connection
Check the Mech-Center Configuration and Connect to the Robot
Please refer to Test Robot Connection.
| The Kawasaki robots communicate with Mech-Center through two PC programs. Once the two PC programs are running, the Kawasaki robots can connect to Mech-Center without running the frontend main program. |
Run the Robot Programs
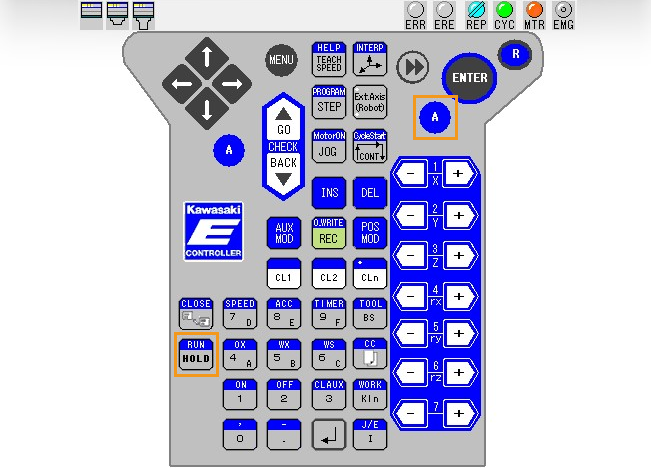
Hold the A key and press MOTOR to power on the motor.
Hold the A key and press CYCLE to start the robot.
If RUN does not turn green, hold the A key and press the RUN/HOLD key on the teach pendant.
|