标准接口状态码及错误排查
概览
在标准接口指令的返回结果中,状态码是用以表示指令执行情况的4位数字代码。状态码分为正常状态码(指令执行正常)和错误状态码(指令执行异常)。对于错误状态码,用户可以参考本文的说明进行错误处理。状态码的详细分类如下表所示。
| 状态码 | 说明 |
|---|---|
1001~1099 |
|
1100~1199 |
|
2001~2099 |
|
2100~2199 |
|
3001~3099 |
|
3100~3199 |
|
4001~4099 |
|
4100~4199 |
机器人相关的正常状态码 |
7001~7099 |
|
6001~6199 |
用户在Mech-Vision中自定义的状态码 |
7100~7199 |
Mech-Vision
Mech-Vision相关的错误状态码
| 错误状态码 | 含义 |
|---|---|
Mech-Vision:方案中存在未注册的工程 |
|
Mech-Vision:无视觉结果 |
|
Mech-Vision:ROI内无点云 |
|
Mech-Vision:触发工程的指令中存在无效参数 |
|
Mech-Vision:设置的位姿数据无效 |
|
Mech-Vision:工程正在运行 |
|
Mech-Vision:未提供数字输出信号列表 |
|
Mech-Vision:位姿数量与标签数量不相等 |
|
Mech-Vision:工程编号不存在 |
|
Mech-Vision:参数配方编号不存在 |
|
Mech-Vision:未配置参数配方 |
|
Mech-Vision:切换参数配方失败 |
|
Mech-Vision:工程运行错误 |
|
Mech-Vision:指令获取的数据与“输出”步骤的“端口类型”参数值不匹配 |
|
Mech-Vision:字符串标签转化为数字失败 |
|
Mech-Vision:设置的视觉点数量无效 |
|
Mech-Vision:运行超时 |
|
Mech-Vision:工程未启动 |
|
Mech-Vision:设置物体尺寸失败 |
|
Mech-Vision:设置的物体尺寸无效 |
|
Mech-Vision:连接相机失败 |
|
Mech-Vision:位姿列表大小与自定义数据列表大小不相等 |
|
Mech-Vision:正在使用虚拟图像数据,暂不运行 |
|
Mech-Vision:设置的位姿类型无效 |
|
Mech-Vision:“路径规划”步骤运行错误 |
|
Mech-Vision:机器人无法到达路径点 |
|
Mech-Vision:检测到奇异点 |
|
Mech-Vision:无效的抓取点 |
|
Mech-Vision:检测到机器人碰撞 |
|
Mech-Vision:当前物体无合适的码放位置 |
|
Mech-Vision:“视觉移动”步骤未收到视觉位姿 |
|
Mech-Vision:设置的末端工具无效 |
|
Mech-Vision:等待相机拍照完成发生超时 |
|
Mech-Vision:识别箱子掩膜错误 |
|
Mech-Vision:识别箱子尺寸错误 |
|
Mech-Vision:设置位姿失败 |
Mech-Viz
Mech-Viz相关的错误状态码
| 错误状态码 | 含义 |
|---|---|
Mech-Viz:软件未注册 |
|
Mech-Viz:工程正在运行 |
|
Mech-Viz:机器人无法到达路径点 |
|
Mech-Viz:触发Mech-Viz的指令中存在无效参数 |
|
Mech-Viz:运行错误 |
|
Mech-Viz:未提供数字输出信号列表 |
|
Mech-Viz:设置的位姿类型无效 |
|
Mech-Viz:设置的位姿数据无效 |
|
Mech-Viz:工程未设置自动加载 |
|
Mech-Viz:设置步骤参数值失败 |
|
Mech-Viz:停止运行失败 |
|
Mech-Viz:设置的分支出口号无效 |
|
Mech-Viz:设置分支失败 |
|
Mech-Viz:检测到奇异点 |
|
Mech-Viz:工程未运行或运行后无结果 |
|
Mech-Viz:设置的分支步骤编号无效 |
|
Mech-Viz:运行超时 |
|
Mech-Viz:设置的索引类步骤编号无效 |
|
Mech-Viz:设置的当前索引值无效 |
|
Mech-Viz:设置索引失败 |
|
Mech-Viz:无效的抓取点 |
|
Mech-Viz:检测到机器人碰撞 |
|
Mech-Viz:当前物体无合适的码放位置 |
|
Mech-Viz:“视觉识别”步骤未调用 |
|
Mech-Viz:视觉服务没有输出视觉结果 |
|
Mech-Viz:ROI内无点云 |
|
Mech-Viz:“视觉移动”步骤未收到视觉位姿 |
|
Mech-Viz:获取步骤参数值失败 |
|
Mech-Viz:获取视觉移动规划结果失败 |
|
Mech-Viz:获取用户自定义数据失败 |
|
Mech-Viz:视觉服务未注册 |
|
Mech-Viz:设置的末端工具无效 |
|
Mech-Viz:识别箱子尺寸错误 |
Mech-Vision错误排查
1001
Mech-Vision:方案中存在未注册的工程
错误原因:
-
未打开Mech-Vision软件。
-
未勾选 自动加载当前方案。
-
Mech-Vision工程中无“输出”步骤。
排查思路:
-
确保已打开Mech-Vision软件。
-
确保已勾选 自动加载当前方案。
-
确保Mech-Vision工程中已存在“输出”步骤。
1002
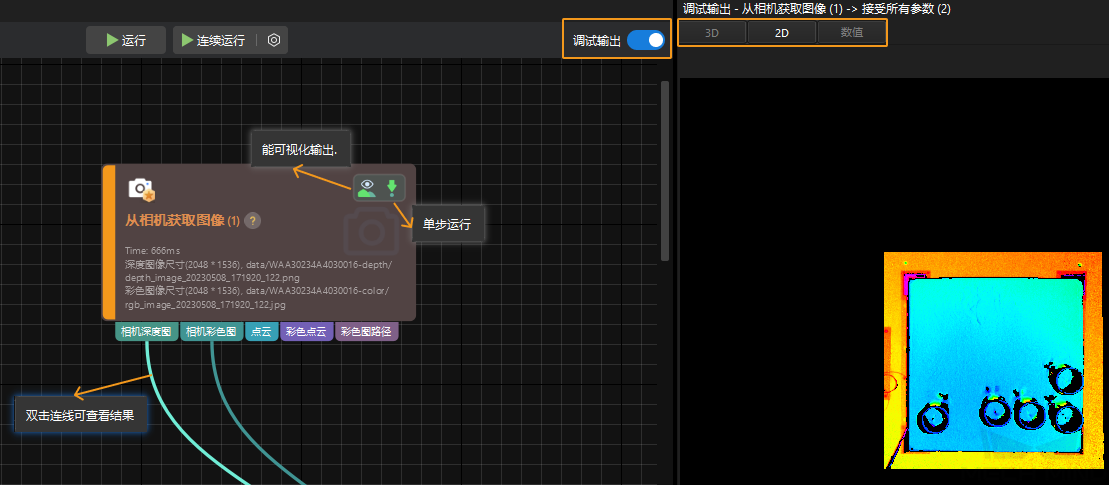
Mech-Vision:无视觉结果
错误原因:
-
在成功运行Mech-Vision工程后,“输出”步骤中端口数据为空。造成该错误的可能原因包括实例分割的置信度阈值过高、场景中没有匹配的物体、ROI设置不当、点云质量低、过滤设置不当等。
排查思路:
-
开启调试输出:打开Mech-Vision软件,将调试输出开关设置为打开状态,单击运行或单步运行,然后双击连线,便可在右侧调试窗口查看具体输出。
-
查找出现问题的步骤:从第一个步骤开始,从上往下依次检查每个步骤的各端口数据流。若某个步骤数据流出现问题,则可以定位该步骤出现问题。
-
检查出现问题步骤的参数:确保所有必要的步骤都已正确配置,且数据能够顺畅流动。
以下步骤的参数对输出结果至关重要,因此,若工程中存在以下步骤,用户需特别注意其步骤参数值。
-
提取3D ROI内点云:在3D ROI设置处,打开编辑器,确保目标物体的点云位于绿色方框内。
-
3D精匹配:根据可视化输出的匹配效果以及现场情况酌情调整置信阈值。
-
如果置信度阈值设置得过高(例如,0.9或更高),则只有当模型对其检测结果非常准确时,才会将检测对象标记为有效匹配。此时适当降低置信度阈值,例如设置为0.5或0.6,以平衡漏检。
-
如果调整置信度阈值效果不佳,则需改进模型训练,使用更多样化和具有挑战性的数据集来增强习实例分割的泛化性。
-
-
1003
Mech-Vision:ROI内无点云
错误原因:
-
3D ROI中没有点云。
| 在实际项目中,根据该错误可以判断料筐是否到位,或料筐是否为空等。因此,该报错并不一定是需要解决的错误。 |
排查思路:
-
检查工程中的ROI设置,确保设置的ROI正确。
1005
Mech-Vision:触发工程的指令中存在无效参数
错误原因:
-
在调用“运行Mech-Vision工程”指令时,设置的“机器人位姿类型”参数值错误。“机器人位姿类型”参数的取值范围为0~3。
-
在调用“运行Mech-Vision工程并获取结果”指令时,设置的“返回数据格式”参数值错误。“返回数据格式”参数的取值范围为1~4。
排查思路:
-
确保指令中设置的参数值在取值范围内。
1006
Mech-Vision:设置的位姿数据无效
错误原因:
-
在调用“运行Mech-Vision工程”指令时,设置的机器人位姿参数值有误,具体分为以下几种:
-
关节角数据不足6位。
-
法兰位姿数据不足6位。
-
法兰位姿数据全为0。
-
| 机器人默认为6轴机器人。如果机器人是4轴或5轴机器人,请使用0填充位姿数据的剩余字段。 |
排查思路:
-
确保指令中设置的机器人位姿参数值正确,即检查设置的关节角或法兰位姿数据是否正确。
1007
Mech-Vision:工程正在运行
错误原因:
-
在Mech-Vision工程仍在运行时,客户端程序再次调用“运行Mech-Vision工程”指令以尝试运行相同的Mech-Vision工程。
| Mech-Vision软件允许同时运行多个不同工程,但一个Mech-Vision工程在运行时不能被再次启动。 |
排查思路:
-
确保客户端程序中设置的Mech-Vision工程编号正确。
-
确保客户端程序中不存在同一Mech-Vision工程在短时间内被再次启动的情况。在运行同一个工程时,客户端需要等该工程运行结束后(Mech-Vision软件日志窗口的视觉标签页下会提示“工程执行结束”),才能再次运行该工程,这样不会出现该错误。
1008
Mech-Vision:未提供数字输出信号列表
错误原因:
-
获取的Mech-Vision吸盘DO信号为空。
排查思路:
-
在路径规划工具中,确保末端工具类型选择拆垛吸盘,且在拆垛吸盘配置器中正确配置DO信号。
1010
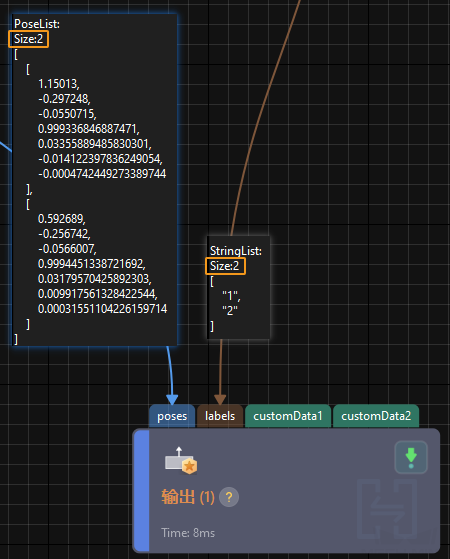
Mech-Vision:位姿数量与标签数量不相等
错误原因:
-
在Mech-Vision工程的“输出”步骤中,poses端口的位姿数量与labels端口的标签数量不相等。
排查思路:
-
检查Mech-Vision工程数据流中的位姿和标签,确保两者数量相等。例如,下图中,poses端口数据与labels端口数据的Size都为2,即两者数量相等。如果poses端口数据的Size为3,labels端口数据的Size为2,则两者数量不相等,就会出现上述错误。
1011
Mech-Vision:工程编号不存在
错误原因:
-
设置的Mech-Vision工程编号在工程列表窗口中不存在。例如,工程列表窗口中只存在编号为1的工程,但设置的工程编号为2。
排查思路:
-
确保已勾选 自动加载当前方案。
-
确保设置的Mech-Vision工程编号在工程列表窗口中已存在。
1012
Mech-Vision:参数配方编号不存在
错误原因:
-
设置的参数配方编号在参数配方编辑器窗口中不存在。例如,参数配方编辑器中只存在编号为1的参数配方,但设置的参数配方编号为2。
排查思路:
-
确保设置的参数配方编号在参数配方编辑器窗口中已存在。
1013
Mech-Vision:未配置参数配方
错误原因:
-
客户端程序调用“切换Mech-Vision参数配方”指令,但Mech-Vision工程未配置任何参数配方。
排查思路:
-
检查Mech-Vision工程的参数配方设置,确保正确设置参数配方及编号。
-
若项目无需切换参数配方,则客户端程序也无需调用“切换Mech-Vision参数配方”指令。
1015
Mech-Vision:工程运行错误
错误原因:
-
Mech-Vision工程在运行过程中出现错误。
| 此状态码仅表示在运行Mech-Vision工程过程中出现错误,并未体现具体错误原因。 |
排查思路:
-
检查日志窗口中的报错信息,根据报错信息排查Mech-Vision工程问题。
1016
Mech-Vision:指令获取的数据与“输出”步骤的“端口类型”参数值不匹配
错误原因:
-
客户端程序在调用“获取视觉结果”指令时,Mech-Vision工程中“输出”步骤的端口类型未选择为预定义(视觉结果)。
-
客户端程序在调用“获取Mech-Vision自定义数据”指令时,Mech-Vision工程中“输出”步骤的端口类型未选择为自定义。
-
客户端程序在调用“获取Mech-Vision规划路径”指令时,Mech-Vision工程中“输出”步骤的端口类型未选择为预定义(机器人路径)。
排查思路:
-
检查Mech-Vision工程中“输出”步骤的“端口类型”参数值。
-
若客户端程序调用“获取视觉结果”指令,Mech-Vision工程中“输出”步骤的端口类型应选择预定义(视觉结果)。
-
若客户端程序调用“获取Mech-Vision自定义数据”指令,Mech-Vision工程中“输出”步骤的端口类型应选择自定义。
-
若客户端程序调用“获取Mech-Vision规划路径”指令,Mech-Vision工程中“输出”步骤的端口类型应选择预定义(机器人路径)。
-
1017
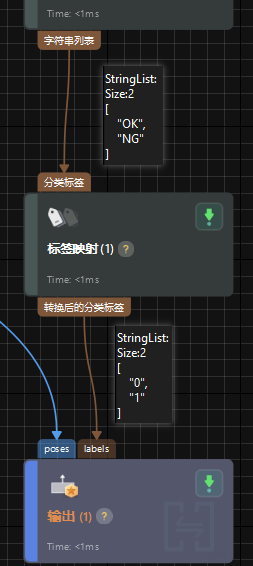
Mech-Vision:字符串标签转化为数字失败
错误原因:
-
在Mech-Vision“输出”步骤中,labels端口输出的数据不是整数形式的字符串。
排查思路:
-
检查labels端口输出的数据。若标签不是整数形式的字符串,请在“输出”步骤前,使用“标签映射”步骤将其映射为整数形式的字符串。例如,下图中,通过“标签映射”步骤,将字符串标签"OK"映射为整数形式的字符串"0",将字符串标签"NG"映射为整数形式的字符串"1"。
1018
Mech-Vision:设置的视觉点数量无效
错误原因:
-
在调用“运行Mech-Vision工程”指令时,设置的“预期视觉点或路径点数量”参数值大于 单次发送位姿的最大数量。
| 在Mech-Vision工具栏的 下,可根据需求更改 单次发送位姿的最大数量,但最大数量的上限为30。 |
排查思路:
-
确保设置的“预期视觉点或路径点数量”参数值不大于 单次发送位姿的最大数量。
1019
Mech-Vision:运行超时
错误原因:
-
从调用“获取视觉结果”指令开始计时,Mech-Vision工程在超时时间(默认10秒)内未执行结束,则报该错误。
| 在Mech-Vision工具栏的 下,修改 获取Mech-Vision数据超时时间 便可更改超时时间。 |
排查思路:
-
客户端程序在调用“获取视觉结果”指令之前,可以适当添加一段延时程序。
-
对于执行时间较长的Mech-Vision工程,可适当修改上述超时时间。
1020
Mech-Vision:工程未启动
错误原因:
-
客户端程序未先调用“运行Mech-Vision工程”指令,就直接调用“获取视觉结果”指令,则报该错误。例如,工程列表中存在编号为1和2的Mech-Vision工程,如果客户端程序通过指令先运行Mech-Vision工程1,然后尝试获取Mech-Vision工程2的视觉结果,则报该错误。
-
客户端程序已调用“获取视觉结果”指令并获取所有视觉点,但仍继续调用“获取视觉结果”指令。
排查思路:
-
检查客户端程序,确保“获取视觉结果”指令设置的Mech-Vision工程编号正确。
-
如果“获取视觉结果”指令返回数据中的“是否已获取所有视觉点”参数值为1,则表示所有视觉点均已传输完毕,客户端程序请勿再调用该指令。
1023
Mech-Vision:连接相机失败
错误原因:
-
Mech-Vision工程中“从相机获取图像”步骤未能连接到相机。
排查思路:
-
检查相机电源和网络设置,确保相机电源和网络均已正确连接。
-
确保“从相机获取图像“步骤设置的相机IP地址和端口正确。
1024
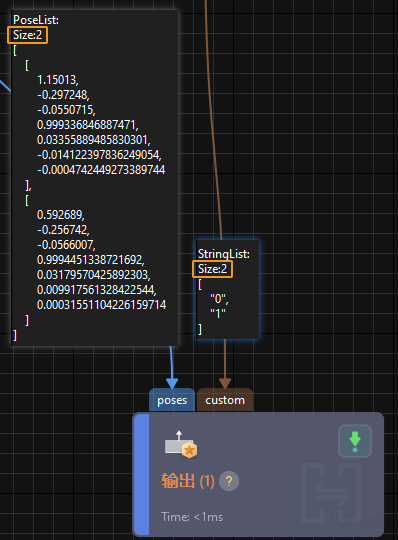
Mech-Vision:位姿列表大小与自定义数据列表大小不相等
错误原因:
-
在Mech-Vision工程的“输出”步骤中,poses端口的位姿列表大小与自定义端口的数据列表大小不相等。例如,假设位姿列表为[[1,1,1,0,1,0,0],[1,1,1,0,0,0,0]],如果自定义数据列表为[[1,1]]或[],则两者列表大小不相等;如果自定义数据列表为[1,1],则两者列表大小相等。
排查思路:
-
检查Mech-Vision工程数据流中的位姿和自定义数据,确保两者的列表大小相等。例如,下图中,poses端口数据与custom端口数据的Size都为2,即两者列表大小相等。如果poses端口数据的Size为3,custom端口数据的Size为2,则两者列表大小不相等,就会出现上述错误。
1025
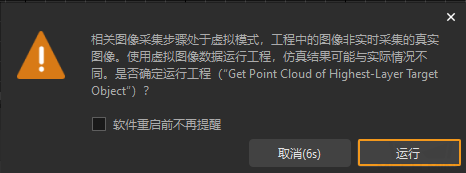
Mech-Vision:正在使用虚拟图像数据,暂不运行
错误原因:
-
在Mech-Vision工程中,“从相机获取图像”步骤使用的图像是本地虚拟图像数据,而不是真实相机采集的图像数据。
排查思路:
-
在“从相机获取图像”步骤的相机设置参数处,确保虚拟模式开关处于关闭状态。
-
若确实需要使用虚拟模式,请在出现如下的弹窗中,单击运行,数据将正常发送。另外,建议勾选软件重启前不再提醒。
1026
Mech-Vision:设置的位姿类型无效
错误原因:
-
在调用“获取Mech-Vision规划路径”指令时,设置的“路径点的位姿类型”参数值错误。“路径点的位姿类型”参数值仅可设置为1或2。
排查思路:
-
确保指令中设置的参数值在取值范围内。
1027
Mech-Vision:“路径规划”步骤运行错误
错误原因:
-
Mech-Vision工程在运行至“路径规划”步骤时发生错误。
| 此状态码仅表示“路径规划”步骤出现错误,并未体现具体错误原因。 |
排查思路:
-
打开路径规划工具,查看详细日志,以确定具体错误原因。
1030
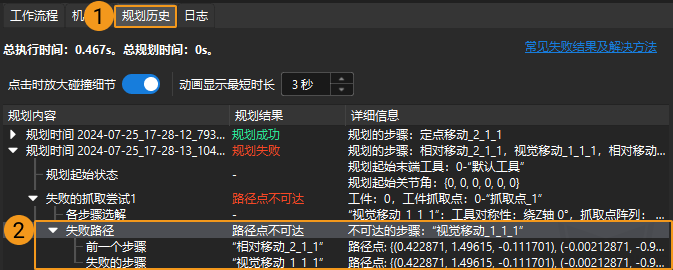
Mech-Vision:机器人无法到达路径点
“路径规划”步骤报错,错误原因:
-
路径点超出机器人的可达范围。
-
机器人运动学逆解失败。
排查思路:
-
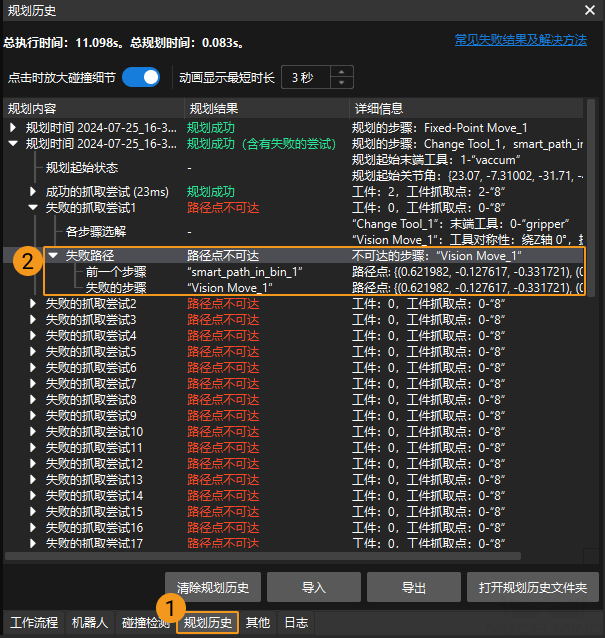
打开“路径规划”步骤的配置向导,查看规划历史,找到显示红色的部分,并逐级打开到最底层,以确定具体出问题的步骤。
-
对于“路径点不可达”,请从以下几个方面进行排查。
-
检查路径点的位姿: 确保位姿朝向正确,且可达。请注意区分物体位姿和TCP位姿,两者不同。
-
检查TCP值:确保“路径规划”中的TCP数据与机器人实际的TCP值一致。
-
1033
Mech-Vision:检测到奇异点
“路径规划”步骤报错,错误原因:
-
机器人在路径规划时检测到奇异点错误,角速度或角加速度超过软件设置的奇异点判断阈值。
-
机器人无法按规划的直线路径移动。
排查思路:
-
若软件设置的奇异点阈值过于严格,可调小降速比或修改最大速度阈值。若需修改奇异点阈值,请联系梅卡曼德技术支持获取帮助。
-
若机器人无法直线移动,可考虑改为关节移动或适当增加过渡点。
1035
Mech-Vision:无效的抓取点
错误原因:
-
所有抓取点都不在料筐内。
-
工件库中抓取点设置的可用工具与路径规划工具中所选择的工具不匹配。
排查思路:
-
对于错误原因一:
-
确保相机外参正确。
-
在Mech-Vision工程的“输出”步骤处,请确保输出的工件抓取点位姿与实际工件位姿相同。
-
在Mech-Vision工程“路径规划”步骤处,单击配置向导以进入路径规划工具,请确保设置的料筐位置与实际料筐位置相同。
-
-
对于错误原因二:
-
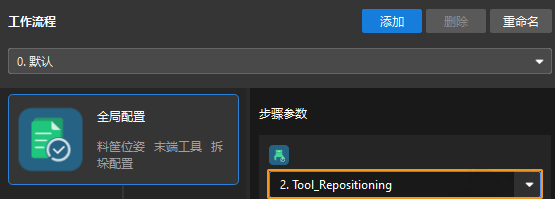
在工件库中,确认已正确配置某个抓取点的可用工具。例如,下图中PickPoint_2的可用工具为Tool_Repositioning。

-
在路径规划工具的全局配置中,请确保所选工具为工具列表中抓取点的可用工具。
-
1036
Mech-Vision:检测到机器人碰撞
“路径规划”步骤报错,错误原因:
-
机器人与场景物体会发生碰撞。
-
机器人与物体点云会发生碰撞。
排查思路:
-
对于机器人与场景物体发生的碰撞,可考虑增加过渡点,以避开场景物体。
-
对于机器人与物体点云发生的碰撞,可考虑调整点云碰撞检测的阈值。
-
若在路径规划的初始位置报错,可考虑设置机器人HOME位姿。
1044
Mech-Vision:“视觉移动”步骤未收到视觉位姿
“路径规划”步骤报错,错误原因:
-
“路径规划”步骤的输入端口没有收到位姿数据。
排查思路:
-
检查“路径规划”步骤的视觉点端口,确保该端口存在位姿数据。
1047
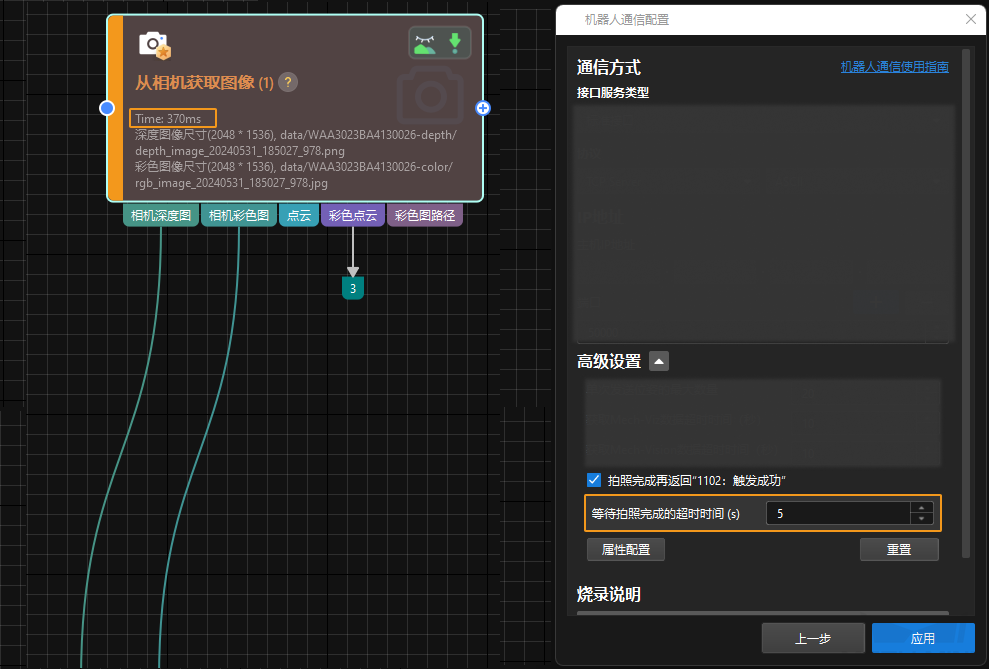
Mech-Vision:等待相机拍照完成发生超时
错误原因:
-
在“等待拍照完成的超时时间”内,“从相机获取图像”步骤未运行完成。
排查思路:
-
在工具栏选择“机器人通信配置”,点击“高级设置”。查看“等待拍照完成的超时时间”(仅在勾选“拍照完成再返回‘1102: 触发成功’”复选框后可见)。
-
比较设置的“等待拍照完成的超时时间”与“从相机获取图像”步骤的运行时间。如果“等待拍照完成的超时时间”比“从相机获取图像”步骤的实际运行时间短,请修改“等待拍照完成的超时时间”,使其值比“从相机获取图像”步骤的运行时间值大。例如,下图中“等待拍照完成的超时时间”大于“从相机获取图像”步骤的运行时间,此设置是合理的。
1048
Mech-Vision:识别箱子掩膜错误
错误原因:
-
Mech-Vision工程使用“验证箱型目标的物体掩膜”步骤对箱子掩膜进行验证,但验证结果不符合该步骤设定的参数,即设定的 箱子尺寸必须保持一致 、所有箱子必须被识别到 、矩形度校验 参数有误。
排查思路:
-
检查“验证箱型目标的物体掩膜”步骤,确保输入端口数据和步骤参数正确。
Mech-Viz错误排查
2001
Mech-Viz:软件未注册
错误原因:
-
未打开Mech-Viz软件。
-
在开发者模式下,并行开启多个Mech-Viz软件。
排查思路:
-
确保已打开Mech-Viz软件。
-
退出Mech-Viz开发者模式,重启Mech-Viz软件。
2002
Mech-Viz:工程正在运行
错误原因:
-
在Mech-Viz工程仍在运行时,客户端程序再次调用“运行Mech-Viz工程”指令以尝试运行Mech-Viz工程。
排查思路:
-
确保客户端程序中不存在同一Mech-Viz工程在短时间内被再次启动的情况。
2004
Mech-Viz:机器人无法到达路径点
错误原因:
-
路径点超出机器人的可达范围。
-
若Mech-Viz工程中存在“切换工具”步骤,则切换工具前后的TCP发生变化,可能导致机器人无法到达路径点。
排查思路:
-
打开Mech-Viz软件,查看规划历史,找到显示红色的部分,并逐级打开到最底层,以确定具体出问题的步骤。
-
对于“路径点不可达”,请从以下几个方面进行排查。
-
检查路径点的位姿: 确保位姿朝向正确,且可达。请注意区分物体位姿和TCP位姿,两者不同。
-
检查TCP值:确保Mech-Viz中的TCP数据与机器人实际的TCP值一致。
-
检查软限位:请确认软限位设置是否正确(在Mech-Viz软件界面的右侧面板底部,依次单击)。
-
2006
Mech-Viz:触发Mech-Viz的指令中存在无效参数
错误原因:
-
在调用“运行Mech-Viz工程”指令时,设置的“机器人位姿类型”参数值错误。“机器人位姿类型”参数的取值范围为0~2。
排查思路:
-
确保指令中设置的参数值在取值范围内。
2011
Mech-Viz:未提供数字输出信号列表
错误原因:
-
获取的Mech-Viz吸盘DO信号为空。
排查思路:
-
确保“视觉移动”步骤后存在“设置DO”步骤,且在“设置DO”的步骤参数中,“接收对象”下勾选“标准接口”。
-
确保末端工具类型选择拆垛吸盘,且在拆垛吸盘配置器中正确配置DO信号。
2012
Mech-Viz:设置的位姿类型无效
错误原因:
-
在调用“获取Mech-Viz规划路径”指令时,设置的“路径点的位姿类型”参数值错误。“路径点的位姿类型”参数值应为1或2。
-
在调用“运行Mech-Viz工程并获取规划路径”指令时,设置的“路径点的位姿类型”参数值错误。“路径点的位姿类型”参数值应为1或2。
排查思路:
-
确保指令中设置的参数值在取值范围内。
2013
Mech-Viz:设置的位姿数据无效
错误原因:
-
在调用“运行Mech-Viz工程”指令时,设置的机器人位姿参数值有误,具体分为以下几种:
-
关节角数据不足6位。
-
法兰位姿数据不足6位。
-
法兰位姿数据全为0。
-
| 机器人默认为6轴机器人。如果机器人是4轴或5轴机器人,请使用0填充位姿数据的剩余字段。 |
排查思路:
-
确保指令中设置的机器人位姿参数值正确。
2014
Mech-Viz:工程未设置自动加载
错误原因:
-
Mech-Viz工程未在Mech-Viz软件中打开。
-
Mech-Viz工程未设置自动加载。
排查思路:
-
在Mech-Viz软件中,打开正确的工程,右键单击工程名称,勾选 设为自动加载。
2016
Mech-Viz:设置步骤参数值失败
错误原因:
-
客户端程序在调用“设置Mech-Viz步骤参数值”指令时发生错误。
排查思路:
-
在property_config文件中,确保正确设置步骤编号和参数名称。
| 在Mech-Vision工具栏的 下,单击 属性配置,即可打开property_config文件。 |
2018
Mech-Viz:设置的分支出口号无效
错误原因:
-
在调用“设置Mech-Viz消息分支出口”指令时,设置的分支出口号小于或等于0,或超出“消息分支”步骤的出口数量。
排查思路:
-
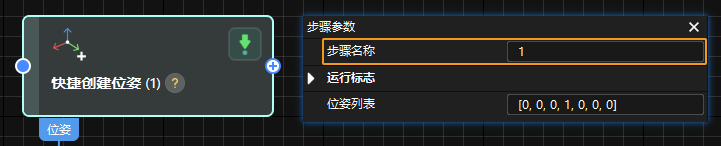
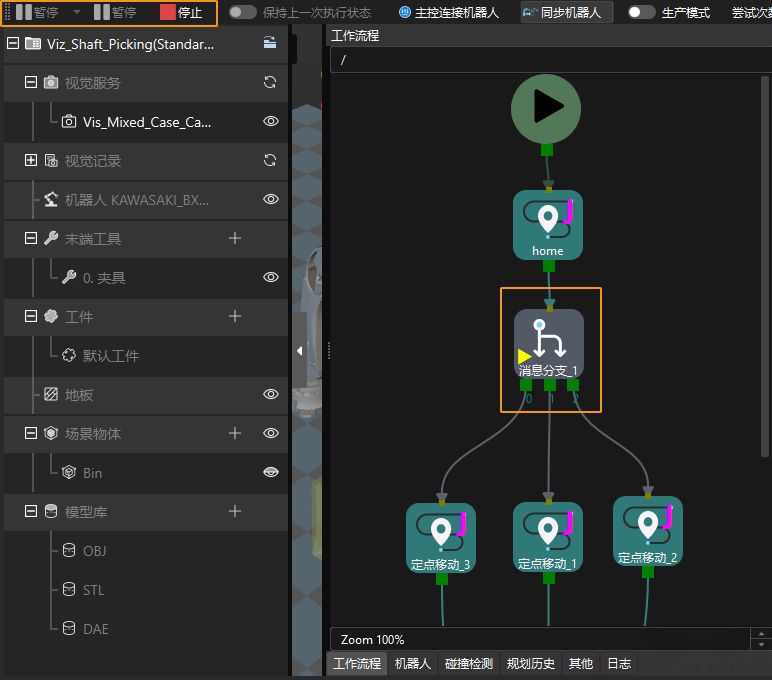
打开Mech-Viz工程,在工作流程界面找到“消息分支”步骤,确保指令中设置的分支出口号在“消息分支”步骤中有对应的出口。例如,指令中设置分支出口号为1,则Mech-Viz工程在运行时将沿“消息分支”步骤的出口0继续执行。
2019
Mech-Viz:设置分支失败
错误原因:
-
在调用“设置Mech-Viz消息分支出口”指令时,设置的步骤编号在Mech-Viz工程中无对应的“消息分支”步骤。
排查思路:
-
确保指令设置的步骤编号在Mech-Viz工程中有对应的步骤。
2020
Mech-Viz:检测到奇异点
错误原因:
-
机器人在路径规划时检测到奇异点错误,角速度或角加速度超过Mech-Viz软件设置的奇异点判断阈值。
-
机器人无法按规划的直线路径移动。
排查思路:
-
若Mech-Viz软件设置的奇异点阈值过于严格,在Mech-Viz软件的其他界面中,可修改最大速度或调小降速比。
-
最大速度:机器人各关节允许的最大角速度。
-
降速比:当检测到机器人的任一关节速度大于最大速度设置值时,Mech-Viz将对应移动类步骤中设置的速度按照降速比进行降速(降速后的速度 = 原速度 × 降速比),并再次进行检测。如果降速后的速度小于最大速度设置值,则机器人会在执行对应步骤时降速运行;如果降速后的速度仍大于最大速度设定值,则Mech-Viz软件会判定该规划路径会引发机器人奇异点,即该规划路径无法通过奇异点检测。

-
-
若机器人无法直线移动,请先尝试方法一。若问题仍未解决,可从剩余两种方法中任选一种进行尝试。
-
方法一:在Mech-Viz软件中,选中报错点对应的移动类步骤,在直线运动选项下,勾选奇异点规避,并根据实际情况进行参数设置。

-
方法二:在Mech-Viz软件中,选中报错点对应的移动类步骤,将运动方式参数设置为关节运动。

-
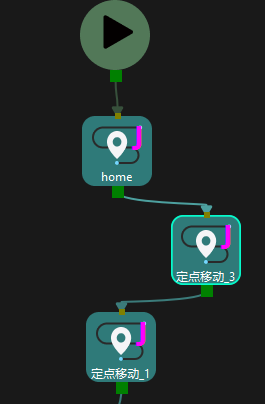
方法三:在Mech-Viz软件中,在报错点对应的步骤前添加一个或多个移动类步骤,即适当增加过渡点。例如,下图中,在定点移动_1和home之间增加一个定点移动_3,即增加一个过渡点。
-
2022
Mech-Viz:工程未运行或运行后无结果
错误原因:
-
客户端程序在调用“设置Mech-Viz消息分支出口”指令时,Mech-Viz工程未运行。
-
客户端程序在调用“获取Mech-Viz规划路径”指令前,没有先调用“运行Mech-Viz工程”指令。
-
客户端程序在调用“获取Mech-Viz规划路径”指令时,Mech-Viz未输出规划结果。
-
客户端程序已调用“获取Mech-Viz规划路径”指令并获取所有路径点,但仍继续调用“获取Mech-Viz规划路径”指令。
排查思路:
-
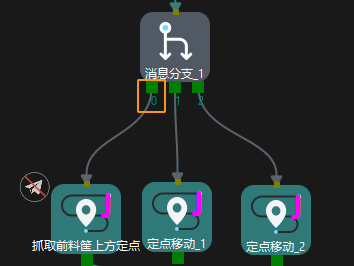
在调用“设置Mech-Viz消息分支出口”指令时,确保Mech-Viz工程正在运行。即在调用“运行Mech-Viz工程”指令后,确保Mech-Viz工程正在运行中(如下图)后,再调用“设置Mech-Viz消息分支出口”指令。
-
在调用“获取Mech-Viz规划路径”指令前,确保先调用“运行Mech-Viz工程”指令。
-
如果“获取Mech-Viz规划路径”指令返回数据中的“是否已获取所有路径点”参数值为1,则表示所有路径点均已传输完毕,客户端程序请勿再调用该指令。
2025
Mech-Viz:运行超时
错误原因:
-
从调用“获取Mech-Viz规划路径”指令开始计时,Mech-Viz工程在规定的超时时间(默认10秒)内未执行结束,则报该错误。
| 在Mech-Vision工具栏的 下,修改 获取Mech-Viz数据超时时间 便可更改超时时间。 |
排查思路:
-
客户端程序在调用“获取Mech-Viz规划路径”指令之前,可以适当添加一段延时程序。
-
对于执行时间较长的Mech-Viz工程,可适当修改上述超时时间。
2028
Mech-Viz:设置索引失败
错误原因:
-
在调用“设置Mech-Viz当前索引”指令时,设置的步骤编号在Mech-Viz工程中无对应的索引类步骤。
排查思路:
-
确保指令设置的步骤编号在Mech-Viz工程中有对应的步骤。
2030
Mech-Viz:无效的抓取点
错误原因:
-
所有抓取点都不在指定的料筐内。
-
工件库中抓取点设置的可用工具与Mech-Viz工程中“切换工具”步骤所选择的工具不匹配。
-
在使用“视觉移动”步骤的视觉结果过滤功能后,Mech-Viz会将超出指定范围的视觉结果视为无效抓取点。
排查思路:
-
对于错误原因一:
-
确保相机外参正确。
-
在Mech-Vision工程的“输出”步骤处,请确保输出的工件抓取点位姿与实际工件位姿相同。
-
在Mech-Viz工程“视觉移动”步骤处,检查。
-
若未勾选通过视觉更新料筐位置,请确保Mech-Viz工程中设置的料筐位置与实际料筐位置相同。
-
若勾选通过视觉更新料筐位置,请确保Mech-Vision工程中识别的料筐位置与实际料筐位置相同。
-
-
-
对于错误原因二:
-
在工件库中,确认已正确配置某个抓取点的可用工具。例如,下图中PickPoint_2的可用工具为Tool_Repositioning。
-
在Mech-Viz工程中,根据“切换工具”步骤的工作模式的不同,分别检查以下选项。
-
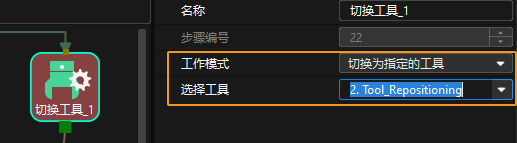
若“切换工具”步骤的工作模式为切换为指定的工具,请确保选择工具的所选项为工具列表中抓取点的可用工具。
-
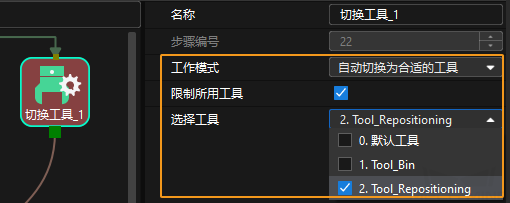
在Mech-Viz工程中,若“切换工具”步骤的工作模式为自动切换为合适的工具,且勾选限制所用工具,此时请确保选择工具的所选项为工具列表中抓取点的可用工具。
-
-
-
对于错误原因三:
-
调整Mech-Vision工程,以使输出的视觉结果符合要求。
-
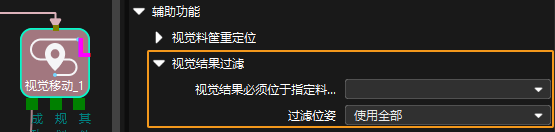
在“视觉移动”步骤的中,调整视觉结果过滤下的两个参数,以确保抓取点在指定的范围内。
-
2036
Mech-Viz:“视觉识别”步骤未调用
错误原因:
-
“视觉移动”步骤设置的视觉服务(“视觉服务名称”参数值)没有被成功调用,同时在Mech-Viz工程运行至“检查视觉结果”步骤的“未调用”出口时,该出口没有连接其他步骤,从而导致Mech-Viz工程中止运行。
排查思路:
-
检查Mech-Viz工作流程,确保“检查视觉结果”步骤之前的“视觉移动”步骤成功调用设置的视觉服务。
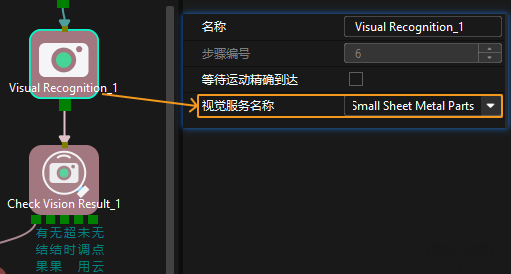
视觉服务是Mech-Viz工程对应的Mech-Vision工程名称(在Mech-Vision软件的工程列表中可查看,如下图)。 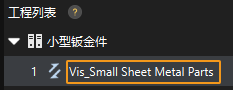
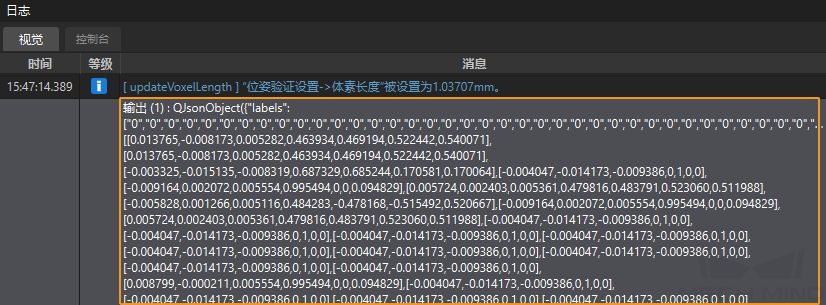
2037
Mech-Viz:视觉服务没有输出视觉结果
错误原因:
-
由于“视觉移动”步骤设置的视觉服务(“视觉服务名称”参数值)没有输出视觉结果,在Mech-Viz工程运行至“检查视觉结果”步骤的“无结果”出口时,该出口没有连接其他步骤,导致Mech-Viz工程中止运行。
排查思路:
-
当Mech-Viz工程运行时,在Mech-Vision软件的日志栏中,确保“输出”步骤有数据,如下图所示。若无数据,请参考1002的排查思路,检查整个数据流。
-
在Mech-Viz工程中,确保“检查视觉结果”步骤的“无结果”出口处存在后续相应处理步骤,例如连接一个“通知”步骤。
2038
Mech-Viz:ROI内无点云
错误原因:
-
由于“视觉移动”步骤设置的视觉服务(“视觉服务名称”参数值)没有输出视觉结果,在Mech-Viz工程运行至“检查视觉结果”步骤的“无点云”出口时,该出口没有连接其他步骤,导致Mech-Viz工程中止运行。
排查思路:
-
参考 1003 状态码进行故障排查。
2039
Mech-Viz:“视觉移动”步骤未收到视觉位姿
错误原因:
-
对于“视觉移动”步骤,可能有以下错误原因:
-
视觉服务未提供视觉结果。
-
视觉结果中的所有位姿已尽数用于规划。
-
排查思路:
-
参考 1002 状态码进行故障排查。
-
检查 Mech-Viz 工程中是否正确使用了“检查视觉结果”步骤。
通信组件错误排查
3001
通信组件:无效指令
错误原因:
-
视觉系统不支持该指令。
排查思路:
-
检查机器人通信配置中设置的协议,确保协议格式正确;同时检查客户端程序中的协议,确保其格式一致且正确。

-
检查客户端程序,确保指令正确。
3002
通信组件:指令参数的数据长度或格式无效
错误原因:
-
在客户端程序发送指令时,指令的数据长度出现异常,例如,机器人位姿数据不足6位。
-
在客户端程序发送指令时,指令的格式出现异常,例如,使用中文逗号作为分隔符。
排查思路:
-
检查客户端程序,确保指令正确。
3007
通信组件:数据确认信号超时
当通信协议选择PROFINET或EtherNet/IP时,错误原因:
-
在视觉系统将新的位姿数据发送给客户端前,在规定的超时时间(默认10秒)内,客户端程序未将Data_Acknowledge信号重置为0,则报该错误。
-
在视觉系统将位姿数据发送给客户端后,在规定的超时时间(默认10秒)内,客户端程序未将Data_Acknowledge信号设置为1(表示客户端已读取数据),则报该错误。
排查思路:
-
检查客户端程序,确保在调用“获取视觉结果”指令或“获取Mech-Viz规划路径”指令前,Data_Acknowledge信号为0。
-
检查客户端程序,确保在读取视觉系统发送的位姿数据后,将Data_Acknowledge信号及时设置为1。