Kawasaki自动标定
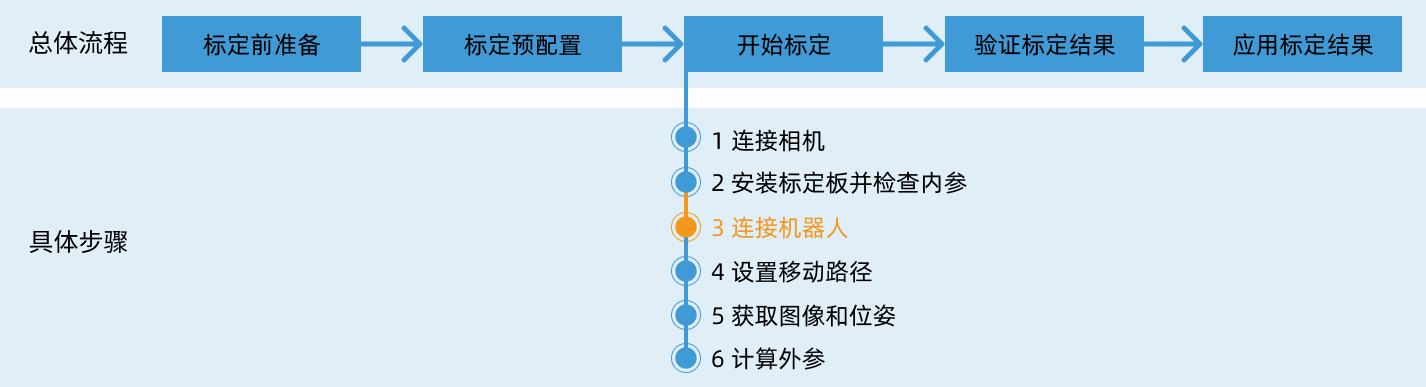
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
1. 选择和修改标定程序
-
在示教模式下,点击程序窗口,在弹出的菜单中,选择列表。

-
在列表中选择前台程序calibrate,按示教器上登录键确认。

前台程序添加完成后如下图所示。

-
修改calibrate程序中mm_init_skt指令的参数,具体操作如下所示。
-
按下示教器上J/E键,在弹出菜单中,点击选择程序编辑画面,按登录键确认。


-
在程序列表中,选择calibrate,按登录键确认。

-
使用示教器上的方向键,将红色框选框移动到mm_init_skt所在行,即确保选中call mm_init_skt(127,0,0,1,50000),然后按登录键确认。

-
使用示教器上的方向键,移动输入框中的光标到相应位置,将127,0,0,1修改为工控机IP地址,将50000修改为Mech-Vision软件中设置的主机端口号。修改完成后按登录键确认,然后按R键退出。

-
在弹出的确认窗口中选择是,然后选择关闭。


-
2. 示教标定起始点
-
将机器人手动移动到标定起始点位置。
标定起始点位置可以直接选用在检查标定板位置和点云质量时机器人所处的位置。
-
点击步骤窗口,输入“JMOVE vis_calib_start;”所在的行号(例如,此处输入14),按登录键确认,便可选中“JMOVE vis_calib_start;”所在行。

-
随后同时按下示教器上的A键和位置修正键。

-
在弹出的窗口中,点击是,便可将机器人当前位姿保存到位姿变量vis_calib_start中,今后可以直接使用该点作为标定起始点。

3. 运行标定程序
-
点击步骤窗口,输入1,并按登录键确认,即可令程序重新从第一行开始执行。

-
将控制器上的示教/再现开关旋转至再现模式,并确认示教器上的示教锁位于关闭位置,此时机器人处于再现模式。

-
在触摸屏上将程序运行模式切换到步骤连续再现一次,然后调整再现速度为10%。

-
在示教器上按住A键,并在触摸屏上点击MOTOR,使MOTOR灯亮起。在示教器上按住A键,并在触摸屏上点击CYCLE,使CYCLE灯亮起。此时如果RUN没有亮起,需按住A键,并按示教器上的暂停/运转键。
RUN、MOTOR、CYCLE全部亮起后,程序才开始运行。 
-
观察Mech-Vision中标定窗口,在连接机器人区域显示“已连接”状态信息后,且按钮由等待机器人连接中…变为断开机器人连接,单击底部栏中的下一步按钮。

-
请分别参考如下链接,接着执行开始标定中的第四步(设置移动路径)以及后续流程。