FANUC自动标定
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
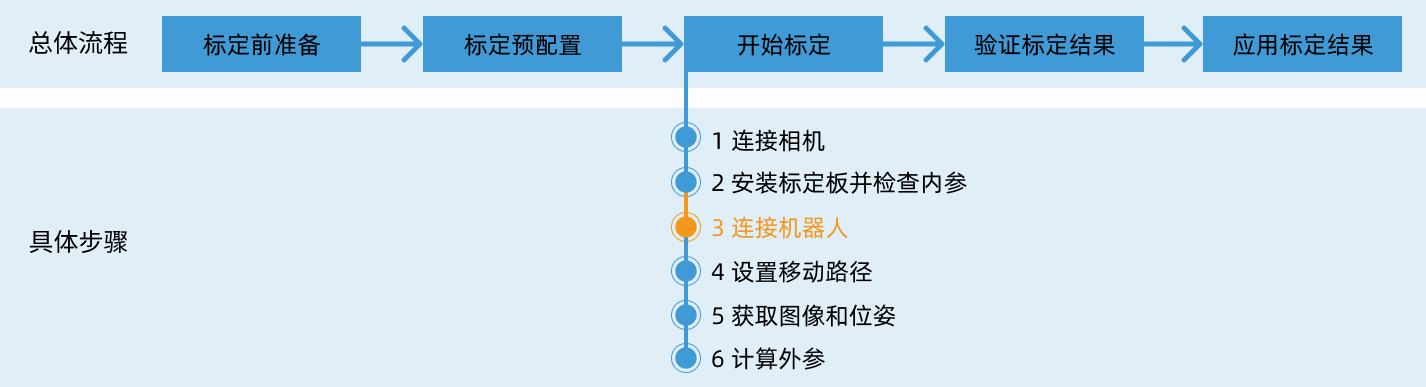
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
1. 选择和修改标定程序
-
将机器人切换至手动模式:示教器上钥匙开关转至ON,控制柜上旋钮旋转至T1或T2。
T1是低速模式,T2是高速模式,建议初学者使用T1模式。 

-
在示教器上,按SELECT键,进入程序选择界面,使用方向键选择MM_AUTO_CALIB程序,按ENTER键,打开程序文件。

-
在MM_AUTO_CALIB程序页面中,设置CALL MM_INIT_SKT参数。该指令共有4个参数,使用方向键选中某个参数,按F5键(即选择更改)根据实际情况设置。
-
参数 1:机器人端口号(选择机器人端口号1~8中的一个即可)。
-
参数 2:工控机IP地址。
-
参数 3:工控机服务端口号,与Mech-Vision中设置的主机端口号保持一致。
-
参数 4:超时等待时间(单位为min)。

-
2. 示教标定起始点
-
打开程序后,按STEP键,机器人切换至单步运行模式,此时示教器上方显示屏上单步变为黄色。

-
按下示教器背部的使能开关(任一均可)。将机器人手动移动到标定起始点位置。
标定起始点位置可以直接选用在检查标定板位置和点云质量时机器人所处的位置。

-
使用方向键将光标移动至第二行指令,并同时按住SHIFT和FWD,运行第二行指令,表示使用0号用户坐标系。

-
使用方向键将光标移动至第三行指令,并同时按住SHIFT和FWD,运行第三行指令,表示使用1号工具坐标系。

-
使用方向键选择 [100],按F5键(即选择位置),再次按F5键(即选择形式),使用方向键选择正交,按ENTER键。


-
在如下界面中,使用方向键选择继续,然后按F4键(即选择完成)。

-
使用方向键选择第五行指令开头,然后同时点击示教器上的 SHIFT 和 F5(即选择修正位置),示教器上显示 “位置已记录至PR[100]” ,此时当前机器人位姿便保存至PR[100]。

-
按STEP键,此时示教器上方显示屏上单步变为灰色,退出单步运行模式。

3. 运行标定程序
-
将机器人切换至自动模式:示教器上钥匙开关转至OFF,控制柜上旋钮旋转至AUTO。


-
按下示教器上的RESET以消除所有报警,然后通过+%和-%将机器人速度调整在10%-20%之间。

-
按下控制柜上的绿色按钮,标定程序自动运行。

-
观察Mech-Vision中标定窗口,在连接机器人区域显示“已连接”状态信息后,且按钮由等待机器人连接中…变为断开机器人连接,单击底部栏中的下一步按钮。

-
请分别参考如下链接,接着执行开始标定中的第四步(设置移动路径)以及后续流程。