通信与I/O控制
本章介绍在3D测量与检测应用中,外部设备(如PLC)、Mech-MSR软件以及轮廓测量仪或者相机之间的交互方式。
典型交互方式(使用轮廓测量仪场景)
在使用轮廓测量仪场景中,Mech-MSR需要从轮廓测量仪获取数据(表面数据或点云),而触发轮廓测量仪进行数据采集的信号可分为两种:
结合触发Mech-MSR工程的运行触发方式与轮廓测量仪的数据采集触发方式,3D测量与检测应用支持以下典型交互方式:
| 方式 | 触发Mech-MSR工程运行方式 | 轮廓测量仪数据采集触发源 | 外部设备获取结果方式 |
|---|---|---|---|
通信指令 |
软件触发 |
通信指令 |
|
图像更新时运行 |
外部触发 |
TCP ASCII协议或DO信号 |
|
DI信号 |
外部触发 |
TCP ASCII协议或DO信号 |
|
通信指令 |
外部触发 |
通信指令 |
|
DI信号 |
软件触发 |
DO信号 |
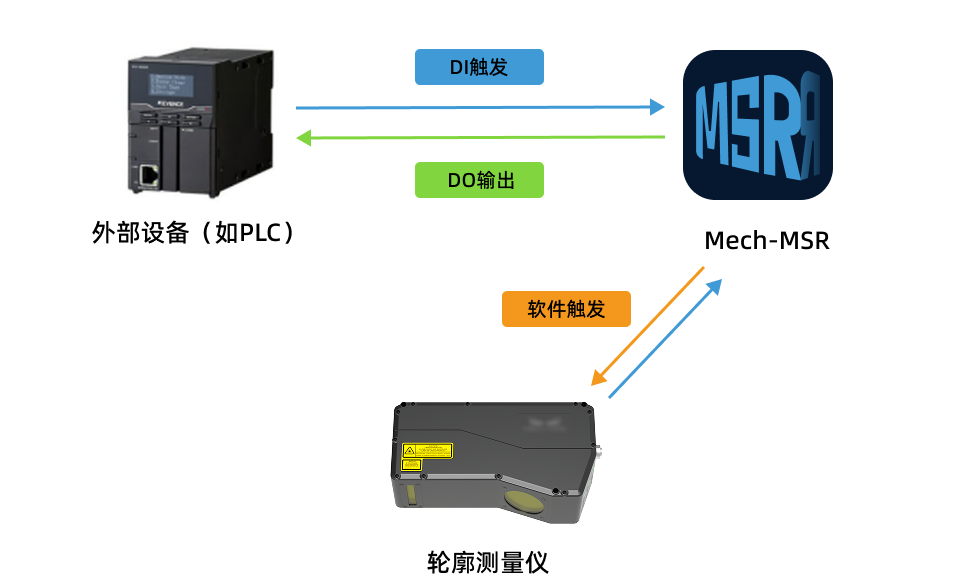
方式一:协议通信 + 软件触发
该方式下,外部设备与Mech-MSR之间基于协议进行通信,轮廓测量仪由Mech-MSR触发进行数据采集。
优点 |
可在Mech-MSR中便捷切换轮廓量测仪的参数组。 |
|---|---|
缺点 |
通信触发和软件触发均会有时间延迟,且延迟时间不稳定。由于触发链路包含多个非即时环节,整体时序难以精确控制,因此该方式不适用需与运动平台同步或固定频率采集的场景。 |
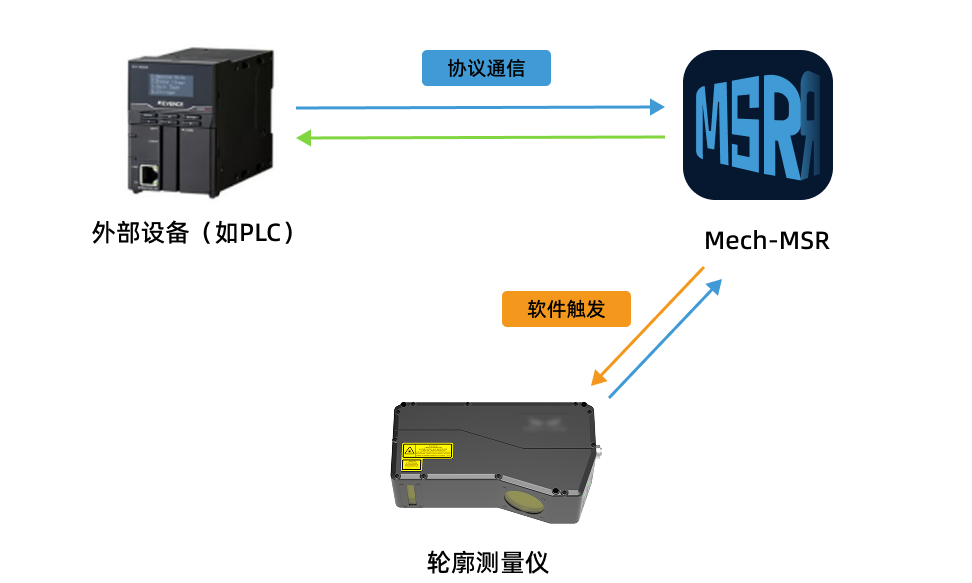
外部设备、Mech-MSR及轮廓测量仪的交互流程如下:
-
外部设备发送指令触发Mech-MSR工程运行;
-
Mech-MSR工程开始运行,并触发轮廓测量仪进行数据采集;
-
Mech-MSR收到轮廓测量仪采集的数据后,继续运行工程,直至结束;
-
Mech-MSR根据外部设备发送的指令,相应地返回结果至外部设备。
方式二:图像更新时运行 + 外部触发
该方式下,外部设备触发轮廓测量仪进行数据采集,Mech-MSR在收到采集的数据后运行工程(即启用图像更新时运行),并通过TCP ASCII协议或DO信号发送工程运行结果到外部设备。
优点 |
外部触发无时延,时效快。 |
|---|---|
缺点 |
无法切换轮廓测量仪的参数组,因此该方式不适用多个Mech-MSR工程使用同一台轮廓测量仪的场景,轮廓测量仪的参数组无法因工程而异。 |
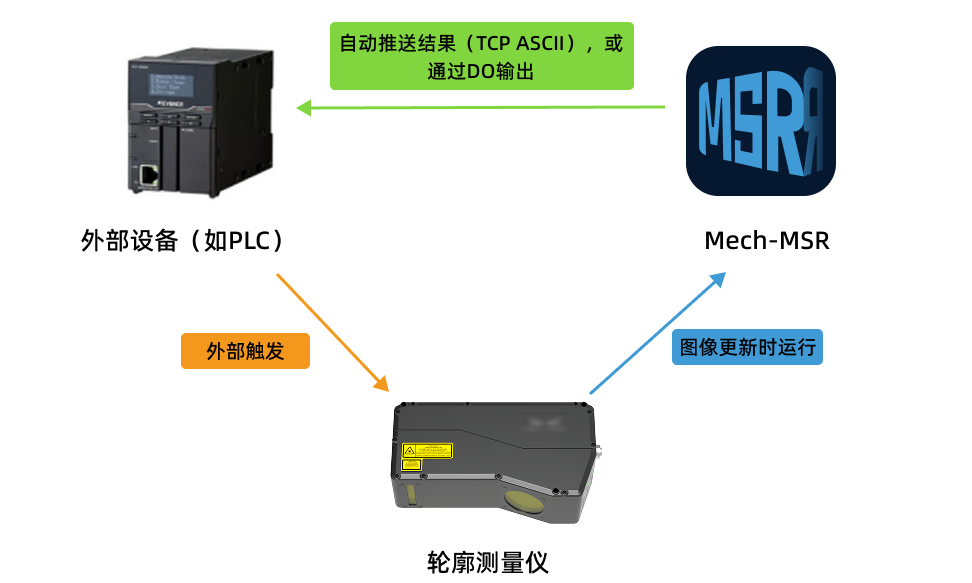
外部设备、Mech-MSR及轮廓测量仪的交互流程如下:
方式三:DI触发 + 外部触发
该方式下,外部设备触发轮廓测量仪进行数据采集,通过通用DI端子触发Mech-MSR工程运行,并通过TCP ASCII协议或DO信号获取工程运行结果。
优点 |
外部触发无时延,时效快。 |
|---|---|
缺点 |
无法切换轮廓测量仪的参数组,因此该方式不适用多个Mech-MSR工程使用同一台轮廓测量仪的场景,轮廓测量仪的参数组无法因工程而异。 |
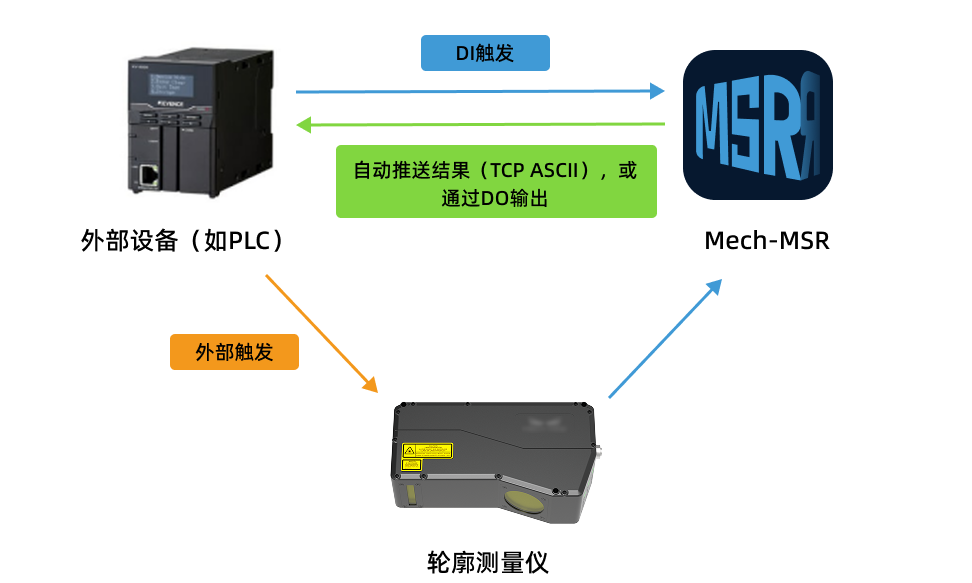
外部设备、Mech-MSR及轮廓测量仪的交互流程如下:
方式四:协议通信 + 外部触发
该方式下,外部设备触发轮廓测量仪进行数据采集,同时与Mech-MSR之间基于协议进行通信。
优点 |
外部触发无时延,时效快。 |
|---|---|
缺点 |
无法切换轮廓测量仪的参数组,因此该方式不适用多个Mech-MSR工程使用同一台轮廓测量仪的场景,轮廓测量仪的参数组无法因工程而异。 |
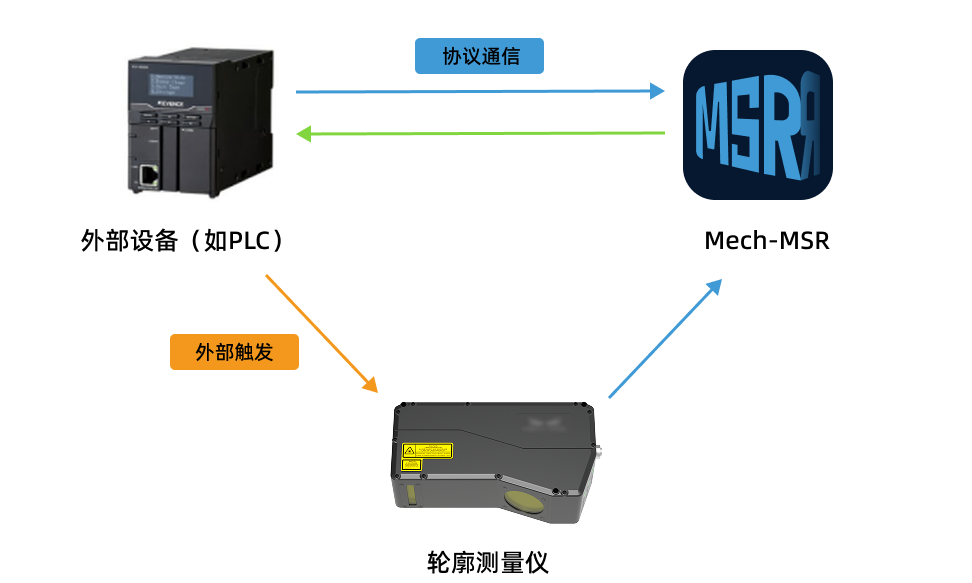
外部设备、Mech-MSR及轮廓测量仪的交互流程如下:
-
外部设备触发轮廓测量仪进行数据采集;
-
外部设备发送指令触发Mech-MSR工程运行;
-
Mech-MSR根据外部设备发送的指令,相应地返回结果至外部设备。
典型交互方式(使用2D/3D相机场景)
在使用2D/3D相机的3D测量与检测应用中,外部设备、Mech-MSR和相机的交互流程如下:
-
外部设备发送指令触发Mech-MSR工程运行;
-
Mech-MSR工程开始运行,并触发相机采集图像;
-
Mech-MSR收到相机采集的图像后,继续运行工程,直至结束;
-
Mech-MSR根据外部设备发送的指令,相应地返回结果至外部设备。