标准接口指令说明
Mech-Vision 标准接口EtherCAT
Mech-Vision支持EtherCAT通讯,作为适配器(从站设备),提供标准接口选项EtherCAT,通过ESI设备描述文件与EtherCAT Master(主站控制器)进行数据通讯。
Mech-Vision部署设置内,EtherCAT标准接口的设置如图示:
(补界面图片)
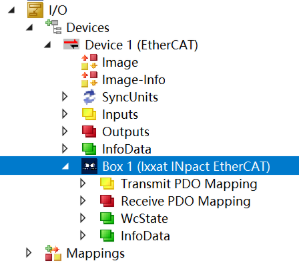
倍福PLC TwinCAT3软件内,适配器“Ixxat INpact EtherCAT”的设定内容如图示:
梅卡曼德 BECKHOFF PLC EtherNet IP接口
接口文件包括:
-
CameraSignalsMove—视觉系统信号传送
-
fcCameraTestManually—视觉系统功能手动模式样例
-
fbCameraTestAuto—视觉系统功能自动模式样例
-
fbCameraTestAuto_Notify—视觉系统功能自动模式获取通知样例
-
MM_XXX_XXX功能块,用于实现各种接口指令的功能
文件存放路径:梅卡曼德 工控机或主机Communication Component安装路径下…{product-center}\Robot_Interface\EtherCAT\Programming Samples\BECKHOFF PLC EtherCAT。
更多接口指令说明请参考 倍福标准接口指令说明。