主控通信配置(xCore)
本节介绍如何将主控程序烧录到ROKAE机器人(xCore控制系统),并完成梅卡曼德视觉系统与机器人的主控通信配置。
| 主控程序烧录是将机器人主控程序导入到机器人系统中,从而建立视觉系统与机器人的主控通信。 |
烧录前准备
设置网络连接
ROKAE机器人底座或控制柜上都有一个网口预设为调试网口,且该网口的IP地址固定为192.168.0.160。该地址在所有机器人上均相同,且不建议轻易修改。因此,用户只需使用网线连接机器人和工控机,然后修改工控机IP地址即可,具体操作如下。
-
将网线的一端插入工控机的网络端口,另一端插入机器人底座或控制柜的调试网口。各机器人的调试网口如下表所示。
机器人机型 调试网口(192.168.0.160) 示意图 ER/ER PRO
J2网口

CR
J1网口

CR-C
控制柜网口

SR
J2网口

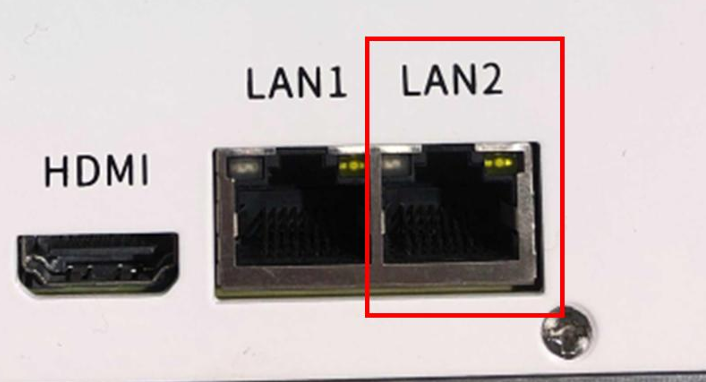
SR-C
LAN2网口
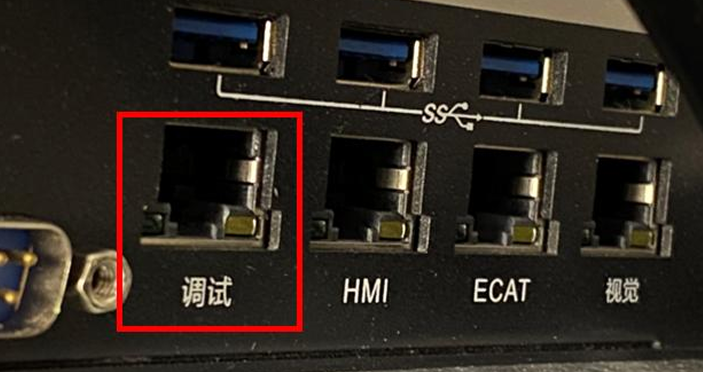
XBC5/XBC5E
调试网口
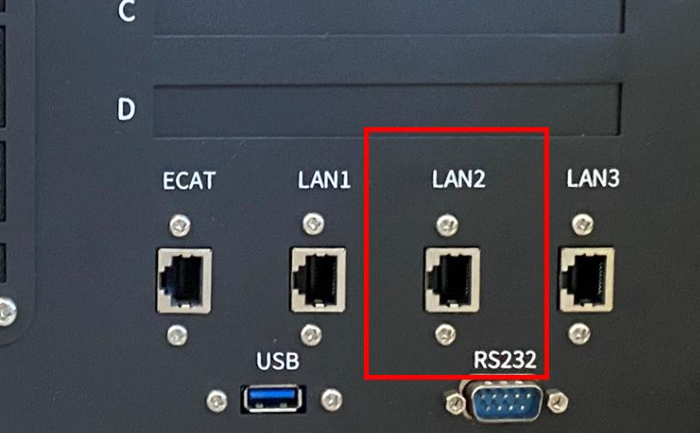
XBC5M
LAN2网口
对于上述未列出的机型,请咨询机器人厂商或测试每个端口IP地址,以查找出IP地址为192.168.0.160的网口。 -
在工控机上,将工控机IP地址设置为192.168.0.222。
-
在工控机上的命令行窗口中,输入ping 192.168.0.160命令,以检查机器人和工控机是否连接成功。
若两者未连接成功,请检查机器人网口和工控机IP地址,确保两者已正确配置。 -
在工控机上,安装并打开Robot Assist控制软件,依次点击,输入192.168.0.160,点击连接。若弹窗提示不支持当前机器人型号,按软件提示完成更新即可。
-
Robot Assist是ROKAE机器人的的上位机软件,可运行在PC、xPad2等设备上。将RobotAssist软件所在设备与机器人接入同一局域网,可选择机器人探测、手动输入控制器服务地址等方式,与连接的机器人建立连接。
-
在本文中,Robot Assist 控制软件安装在与视觉系统共用的同一台工控机上。

-

烧录文件至机器人中
在手动模式下,按如下操作烧录主控程序。
-
在Robot Assist软件界面,依次点击。在用户组下,用户级别选择管理员,密码输入12345(初始默认密码),然后点击登录。
若用户切换为管理员后,在10分钟内未进行任何操作,则系统会自动从管理员切换为操作员。 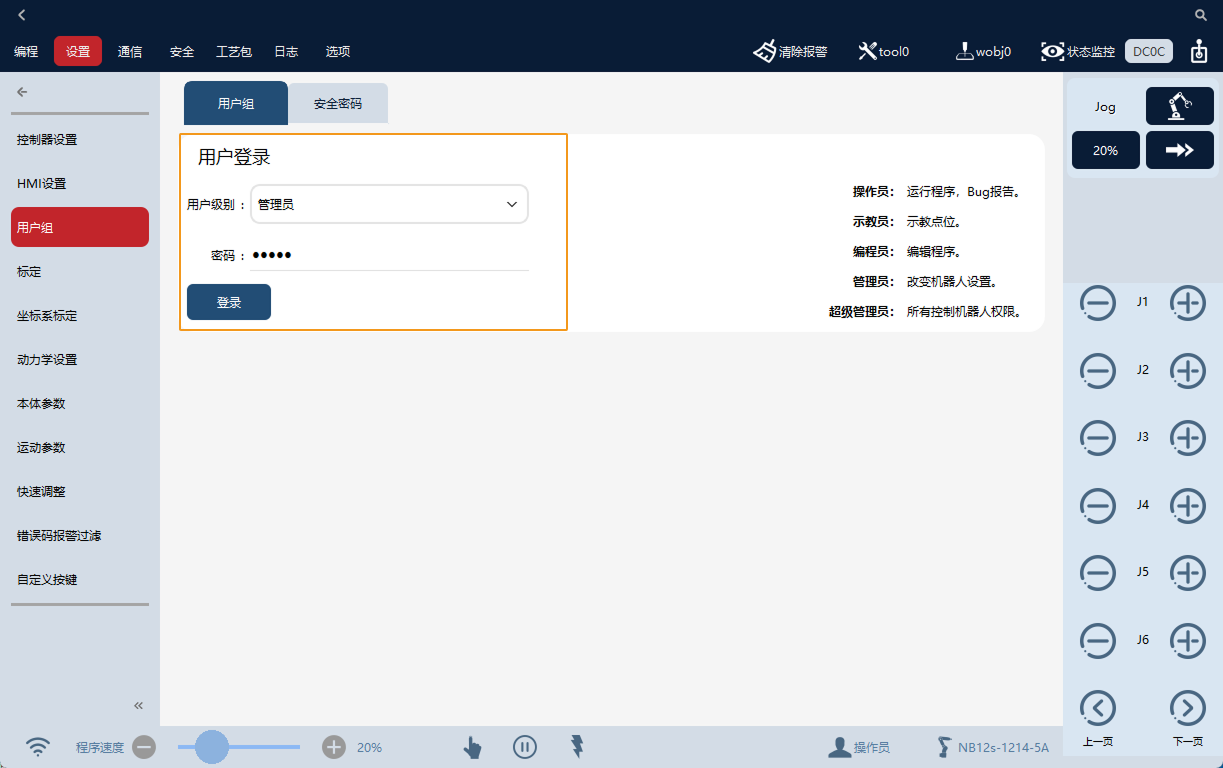
-
在如下界面中,依次点击。
-
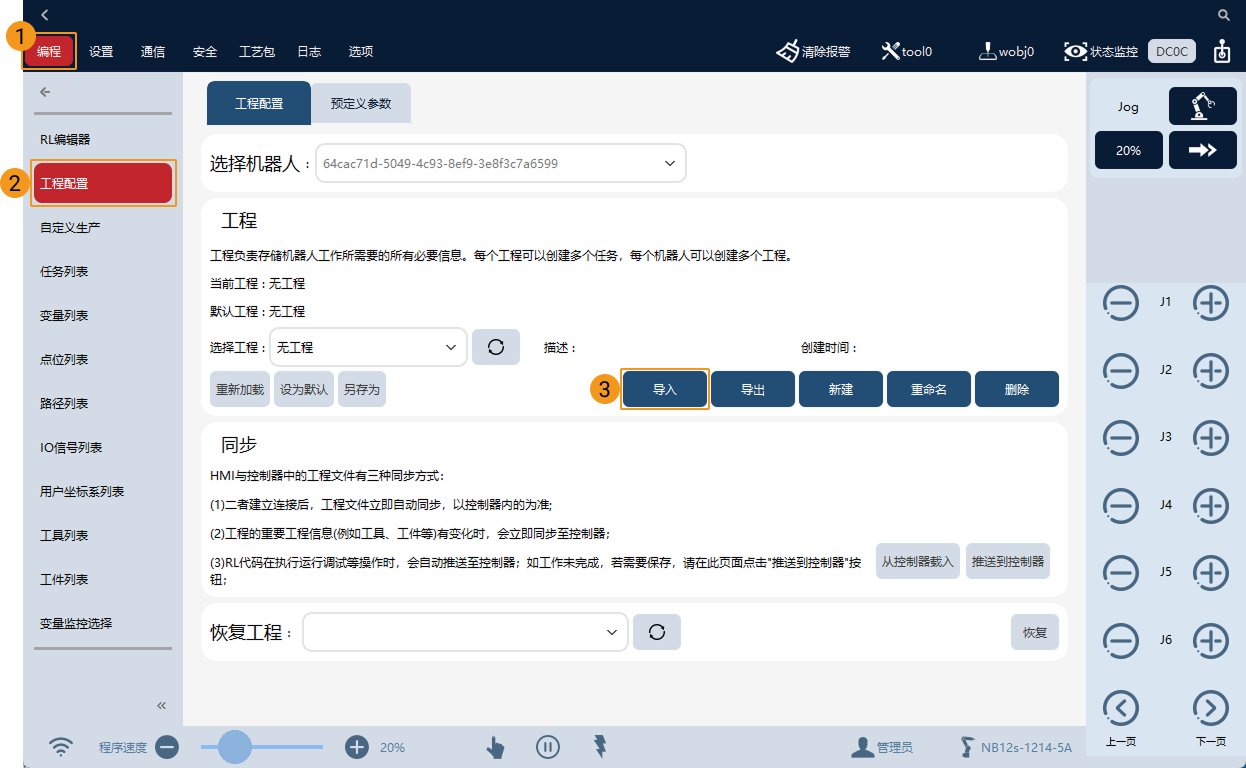
在如下界面中,点击打开,选择
Mech-Vision和Mech-Viz软件安装路径/Communication Component/Robot_Server/Robot_FullControl/rokae目录下的xcore_control.zip文件,点击打开,其他选项使用默认值,最后点击完成。导入成功后,界面右下角会出现相关提示。
-
导入成功后,在如下界面中,工程选择xcore_control,点击重新加载。在弹窗中,点击确定。

配置外部通信
-
在Robot Assist软件界面,依次点击。
-
在通信设置中,设置类型(客户端)、后缀(\r)、IP(此处IP地址为工控机IP地址)和端口(8081),点击确定。
-
在顶部栏中,将外部通信开关置于启用状态。
当外部通信开关处于关闭状态时,才可以进行通信设置。 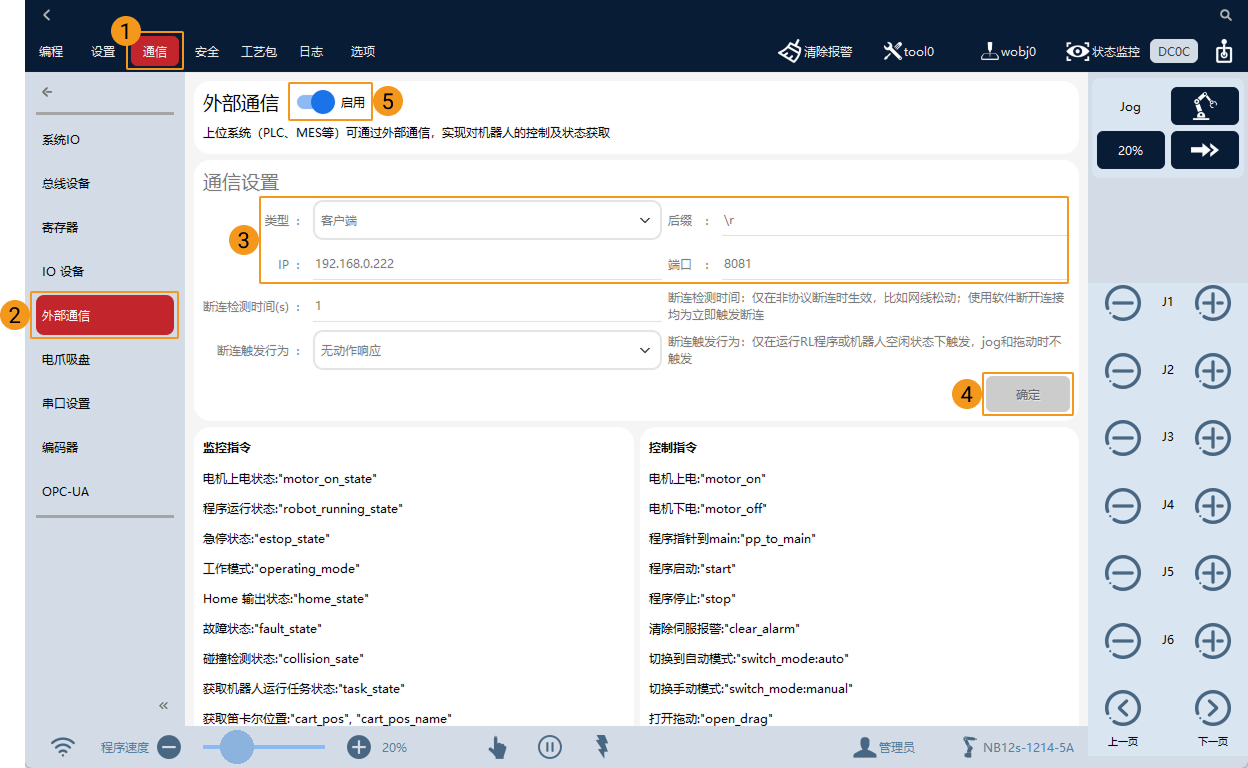
测试主控通信
创建Mech-Viz工程
-
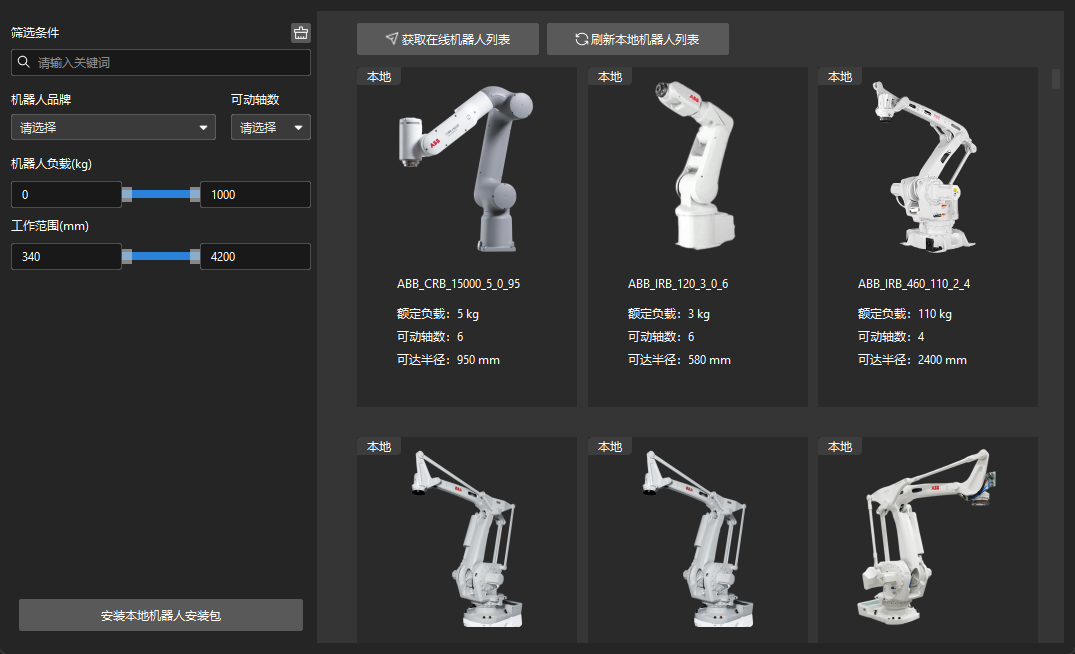
打开Mech-Viz软件,按下键盘上 Ctrl + N(新建工程)。在如下界面中,单击 获取在线机器人列表,根据真实机器人的品牌和型号,选择对应的机器人模型。
-
按下键盘上 Ctrl + S,创建或选择文件夹,以保存工程。
-
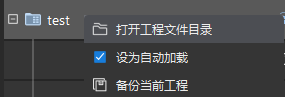
在Mech-Viz软件的左侧窗口中,右键单击工程名称,勾选 设为自动加载。
连接机器人
-
在Mech-Viz软件中,单击工具栏中的 主控连接机器人。
-
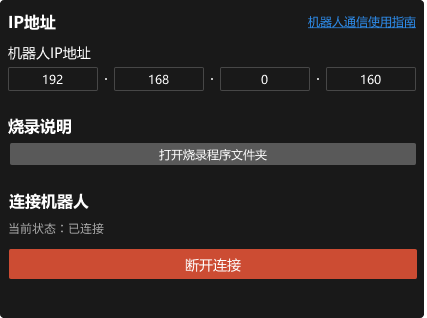
在 机器人IP地址 处,填入 192.168.0.160,单击 连接机器人。
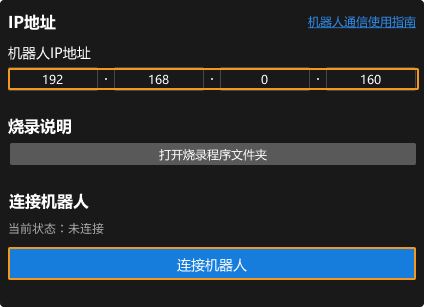
此时,Mech-Viz将等待主控程序运行后才建立连接。此处默认等待 120 秒。

以下为运行主控程序的操作。注意该操作需要在 120 秒内完成,否则需要重新单击Mech-Viz软件中的 连接机器人 。 -
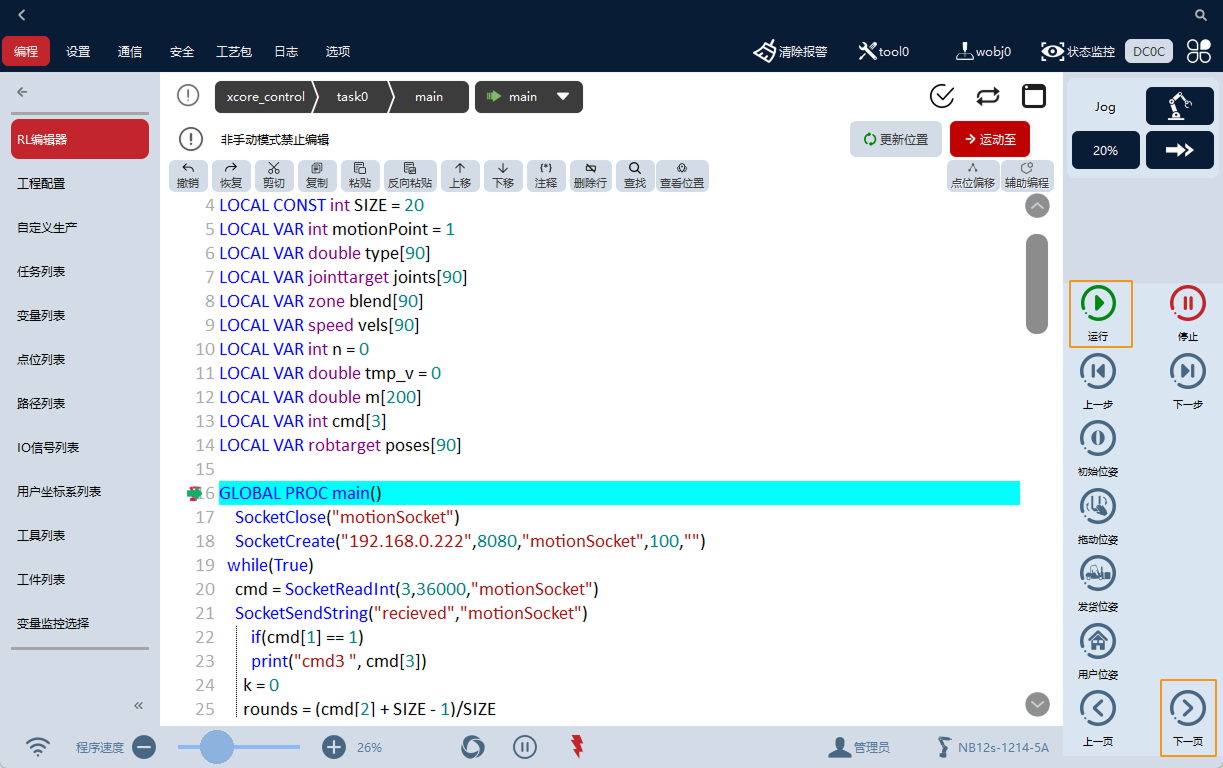
在Robot Assist软件界面,依次点击,将显示
xcore_control/task0/main程序。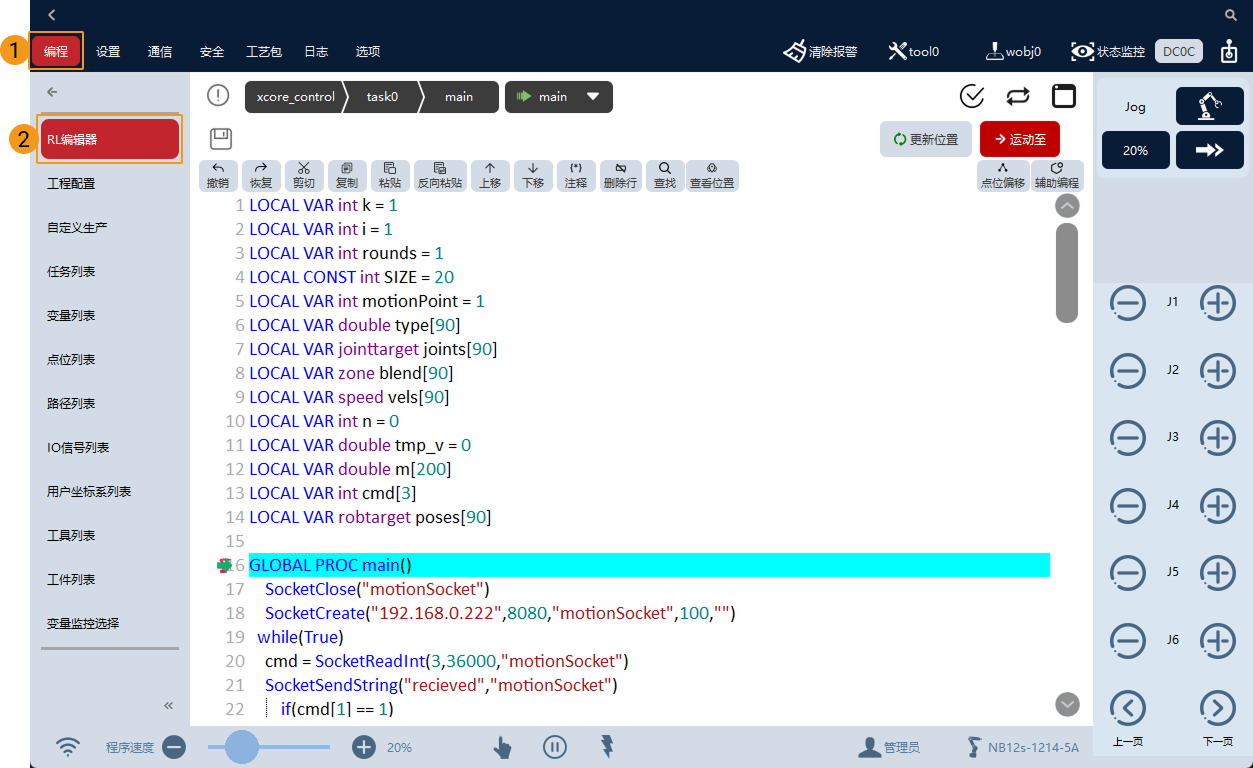
-
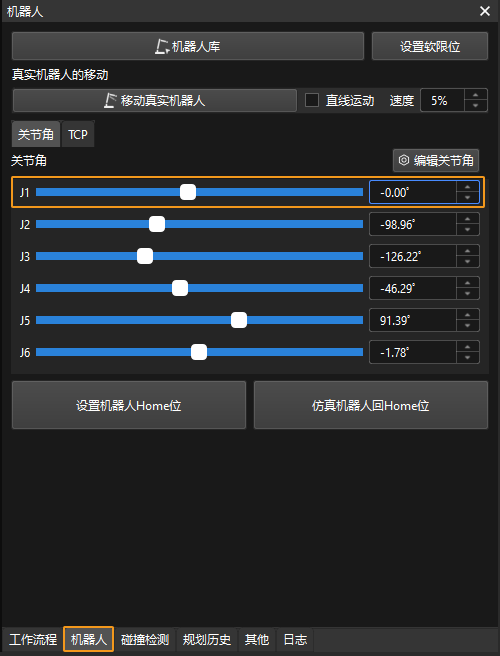
在界面底部栏中,适当调节程序速度,然后将手动模式切换为自动模式,最后给机器人电机上电,最终状态如下图所示。

-
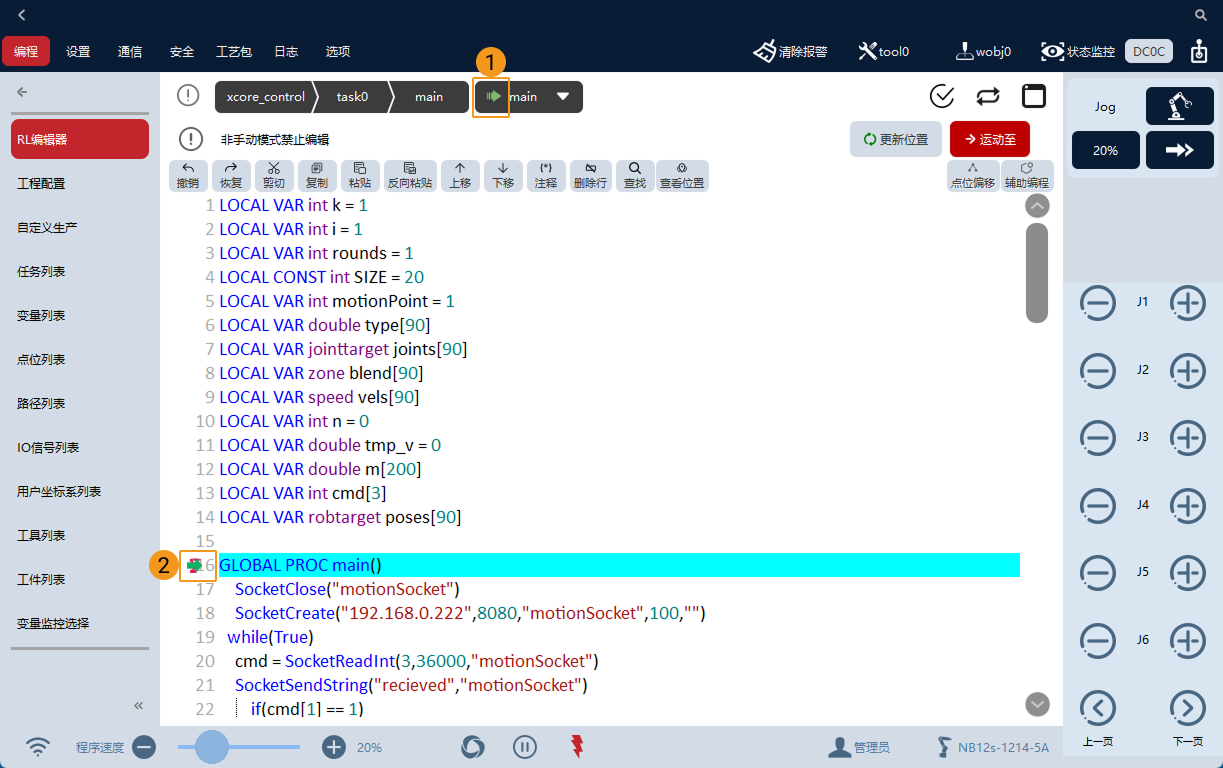
点击main前面的绿色箭头,程序指针将指向main函数。
-
在右侧栏中,点击运行按钮(若无运行按钮,请点击下一页)。
-
若Mech-Viz成功连接真实机器人,则当前状态显示 已连接,同时,工具栏中的图标由蓝色变为绿色。
若连接失败,请检查设置的机器人和工控机IP地址是否有误,然后清除机器人端报警,再重新运行主控程序。