样例程序1:MM_S1_Vis_Basic
程序解读
以下为MM_S1_Vis_Basic样例程序的代码及相关解释说明。
— This is a LUA program.
require("MM_Module")
IP_Address = "192.168.1.8"
Server_Port = 50000
Time_Out = 60
--initialize communication parameters (initialization is required only once)
MM_Init_Socket(IP_Address,Server_Port,Time_Out)
--close socket connection
MM_Close_Socket()
--open socket connection
MM_Open_Socket()
--switch recipe of NO.1 Mech-Vision project
TOP_Status=MM_Switch_Model(1,1)
print("Vision system status code:",TOP_Status)
---check whether the recipe is switched successful
if TOP_Status ~= 1107 then
print("Abnormal vision system status!!!",TOP_Status)
Pause()
end
--trigger NO.1 Mech-Vision project
TOP_Status = MM_Start_Vis(1,1,1,JP[100])
print("Vision system status code:",TOP_Status)
--check whether the Mech-Vision project has been triggered successfully
if TOP_Status ~= 1102 then
print("Abnormal vision system status!!!",TOP_Status)
Pause()
end
--get vision result from NO.1 Mech-Vision project
TOP_Status,TOP_Last_Data,TOP_Pos_Num = MM_Get_VisData(1)
print("Vision result:",TOP_Status,TOP_Last_Data,TOP_Pos_Num)
--check whether vision result has been got successfull
if TOP_Status ~= 1100 then
print("Failed to obtain vision result!!!",TOP_Status)
Pause()
end
--save first vision point data to local variables
MM_Get_Pose(1,20,50,60)
local pose1 = NewPose(0, 0, 200, 0, 0, 0)
--move to approach waypoint of picking
MovL(PR[20],{cnt = -1,uof = pose1})
--move to picking waypoint
MovL(PR[20],{cnt = -1})
--add object grasping logic here, such as "setdo DO_1, 1
Pause()
--move to departure waypoint of picking
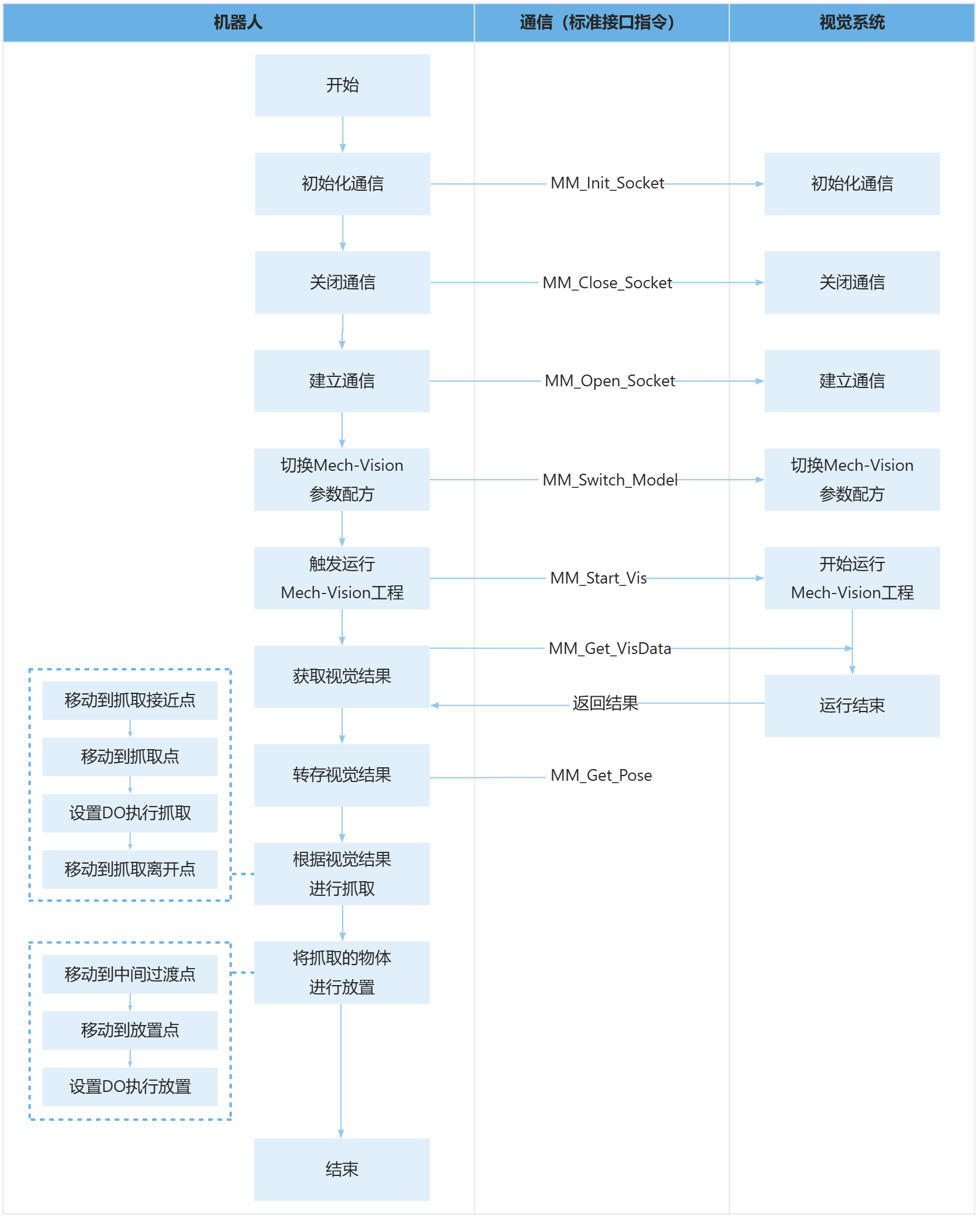
MovL(PR[20],{cnt = -1,uof = pose1})上述样例程序代码对应的流程如下图所示。
下表为上述程序的逻辑解读。用户单击指令名称的超链接便可查看该指令的详细说明。
| 流程 | 代码及说明 | ||
|---|---|---|---|
导入MM_Module头文件 |
|
||
初始化和建立通信 |
先关闭通信再重新连接确保没有连接中的工程。 |
||
切换Mech-Vision参数配方 |
|
||
打印状态码并验证 |
|
||
触发运行Mech-Vision工程 |
|
||
打印状态码并验证 |
|
||
获取视觉结果 |
整条指令表示机器人触发视觉系统运行编号为1的Mech-Vision工程,且期望Mech-Vision工程返回所有视觉点。 |
||
打印视觉结果并验证 |
|
||
转存视觉结果 |
整条指令表示将第一个视觉点的工具位姿、标签和末端工具编号分别转存至指定寄存器。 |
||
移动到抓取点上方 |
|
||
移动到抓取点 |
机器人以直线移动方式从抓取接近点移动到抓取点。 |
||
设置DO执行抓取 |
机器人移动到抓取点后,通过设置DO指令(例如“setdo DO_1, 1”),控制末端工具进行抓取。用户需根据实际场景增加设置DO的操作。
|
||
移动到抓取离开点 |
机器人移动到抓取点上方的某处,即到达抓取离开点。
|