TOPSTAR自动标定
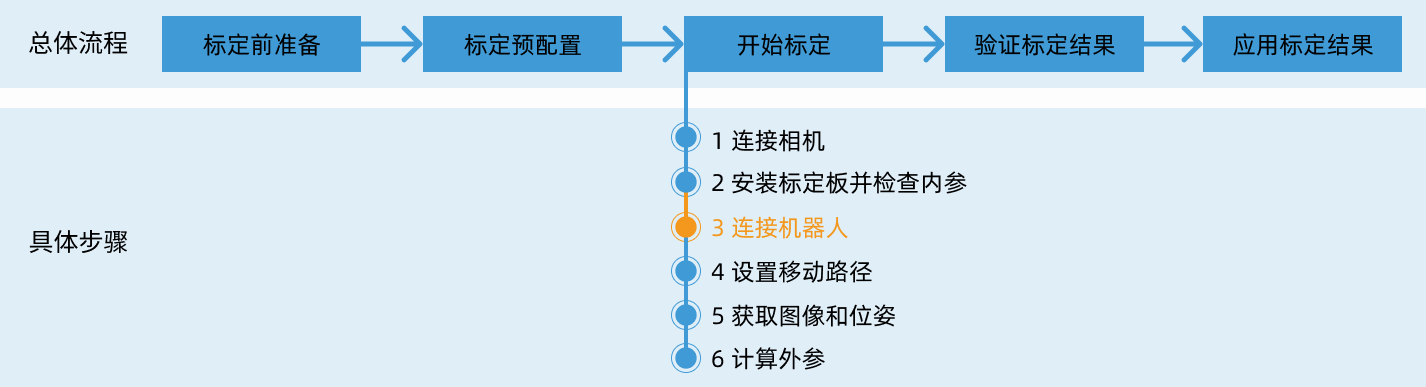
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
1. 选择和修改标定程序
-
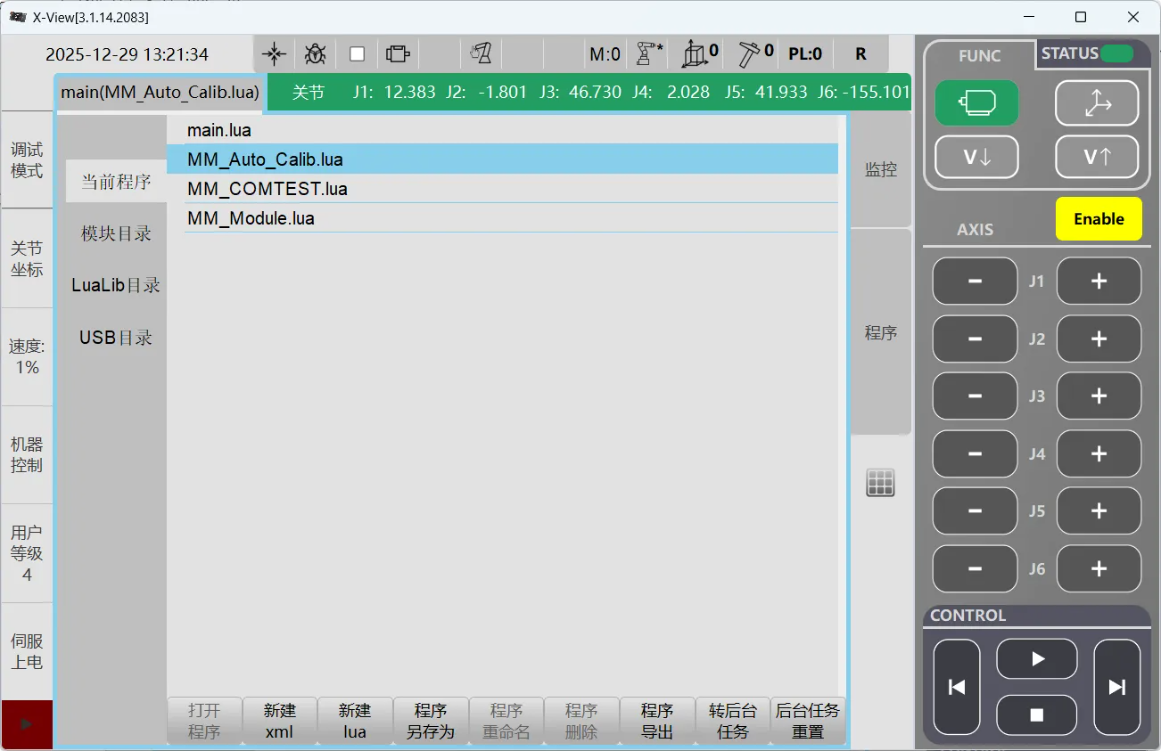
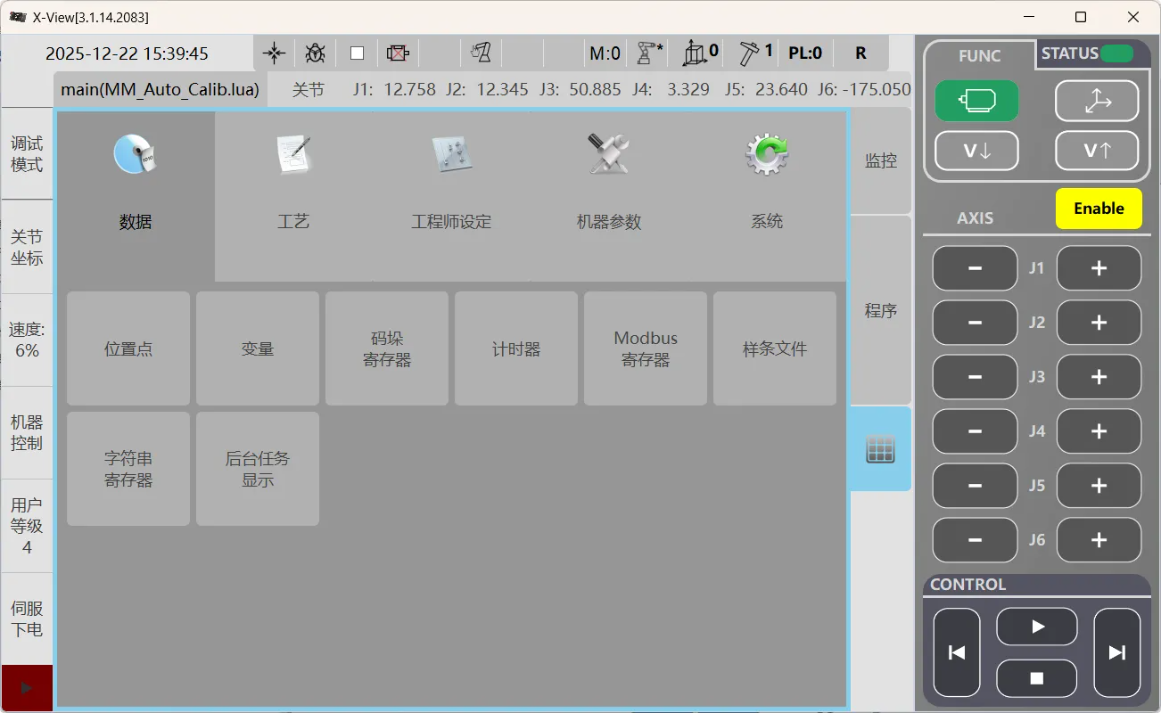
在X-View软件界面点击main进入程序列表选择MM_Auto_Calib.lua。
-
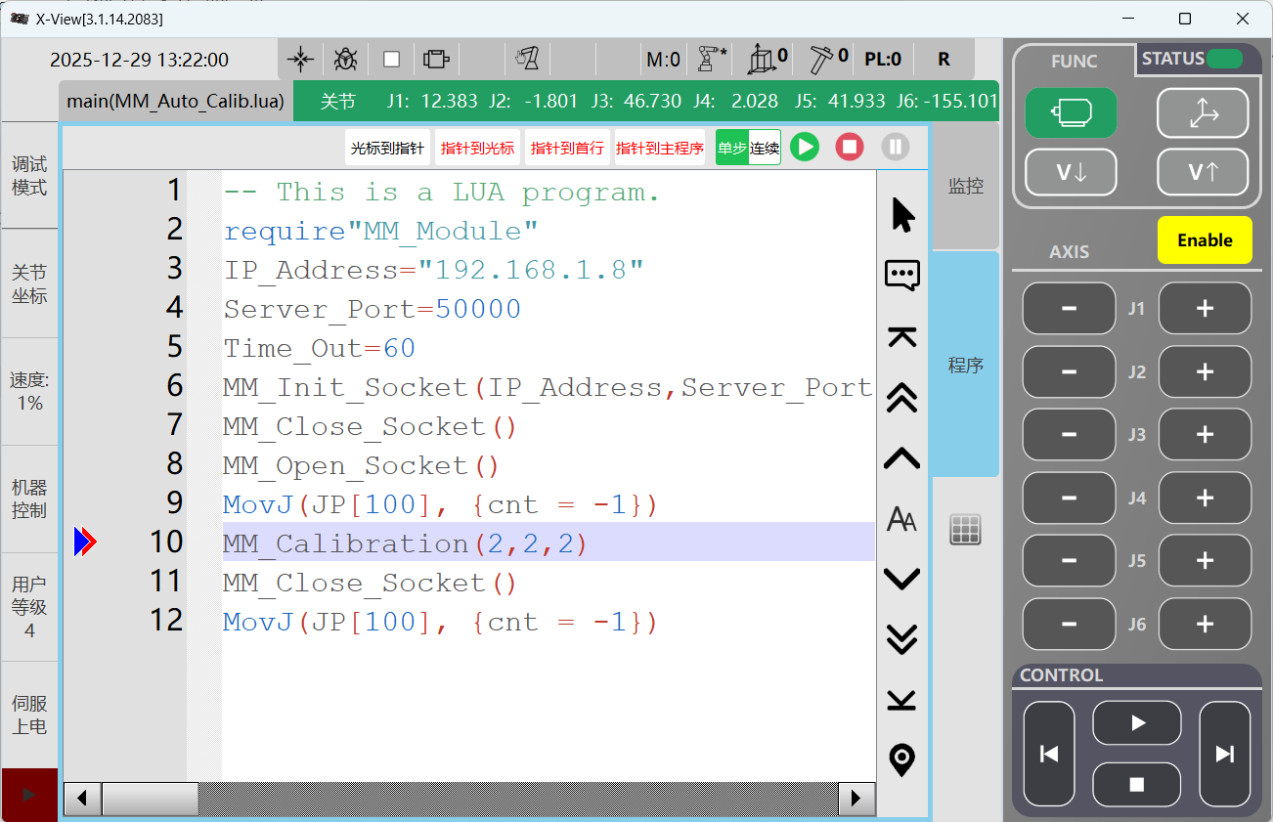
进入MM_Calibration.lua程序页面修改IP和端口号,修改MM_Calibration指令的变量值,请参考标定指令说明。
2. 示教标定起始点
-
将机器人移动到合适起始点,然后在X-View九宫格选项数据菜单下点击位置点。
-
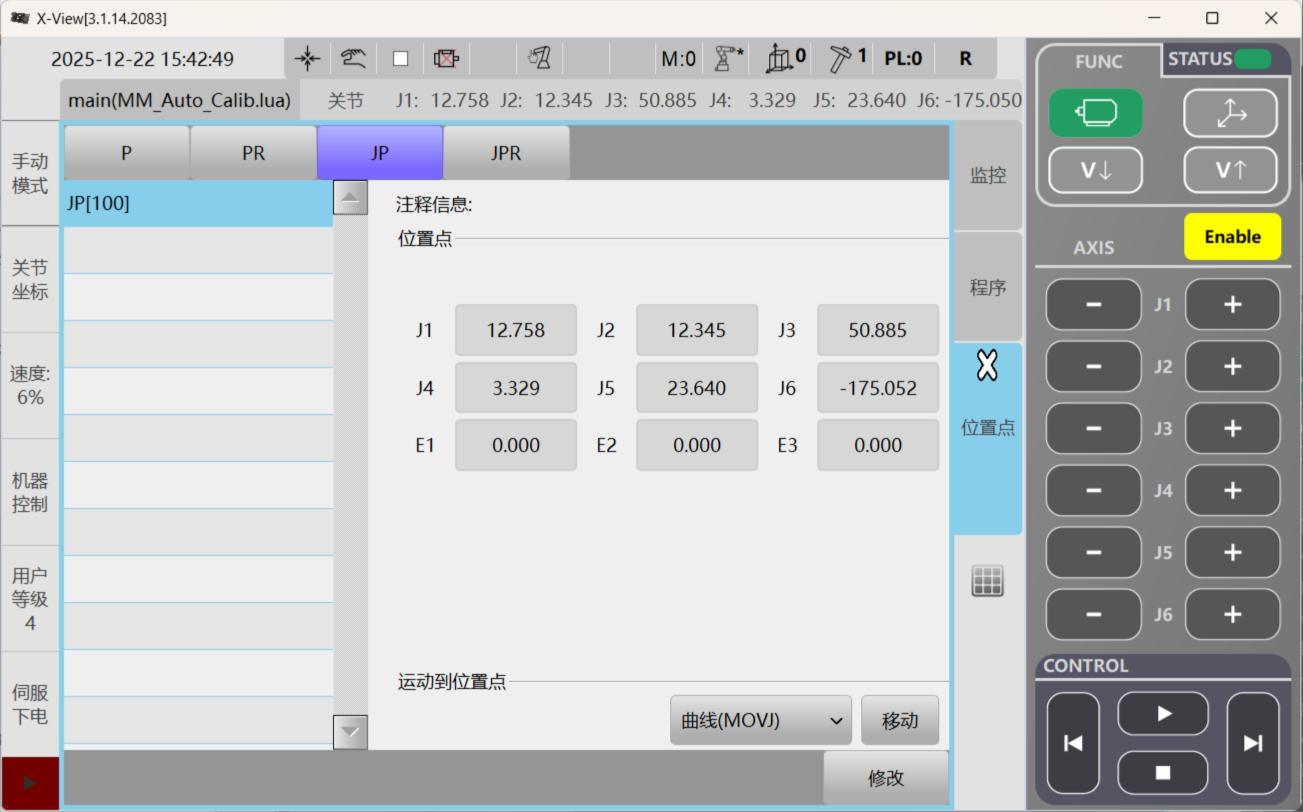
选中JP变量,点击界面右下角修改。
-
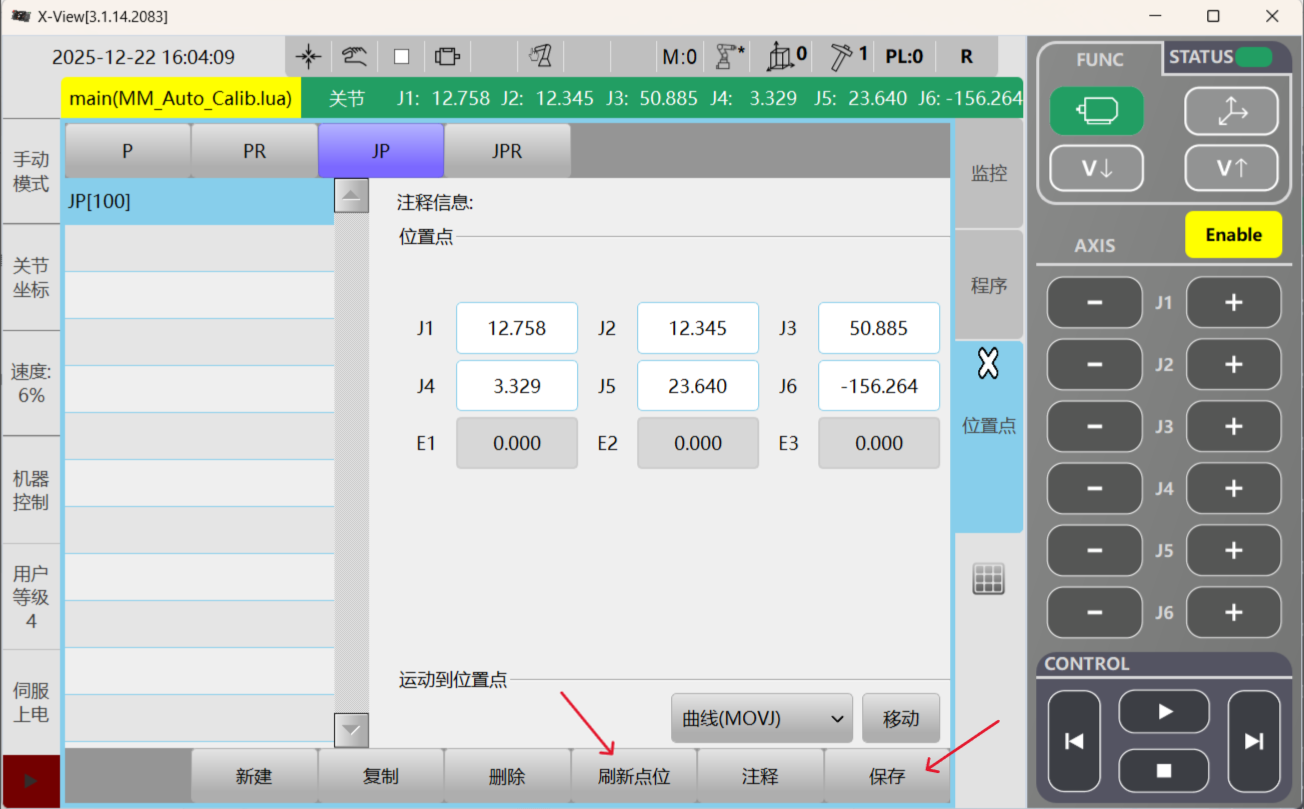
点击刷新点位保证位置点信息准确,然后点击保存,提示位置文件保存完成即可进行下一步。
3. 运行标定程序
-
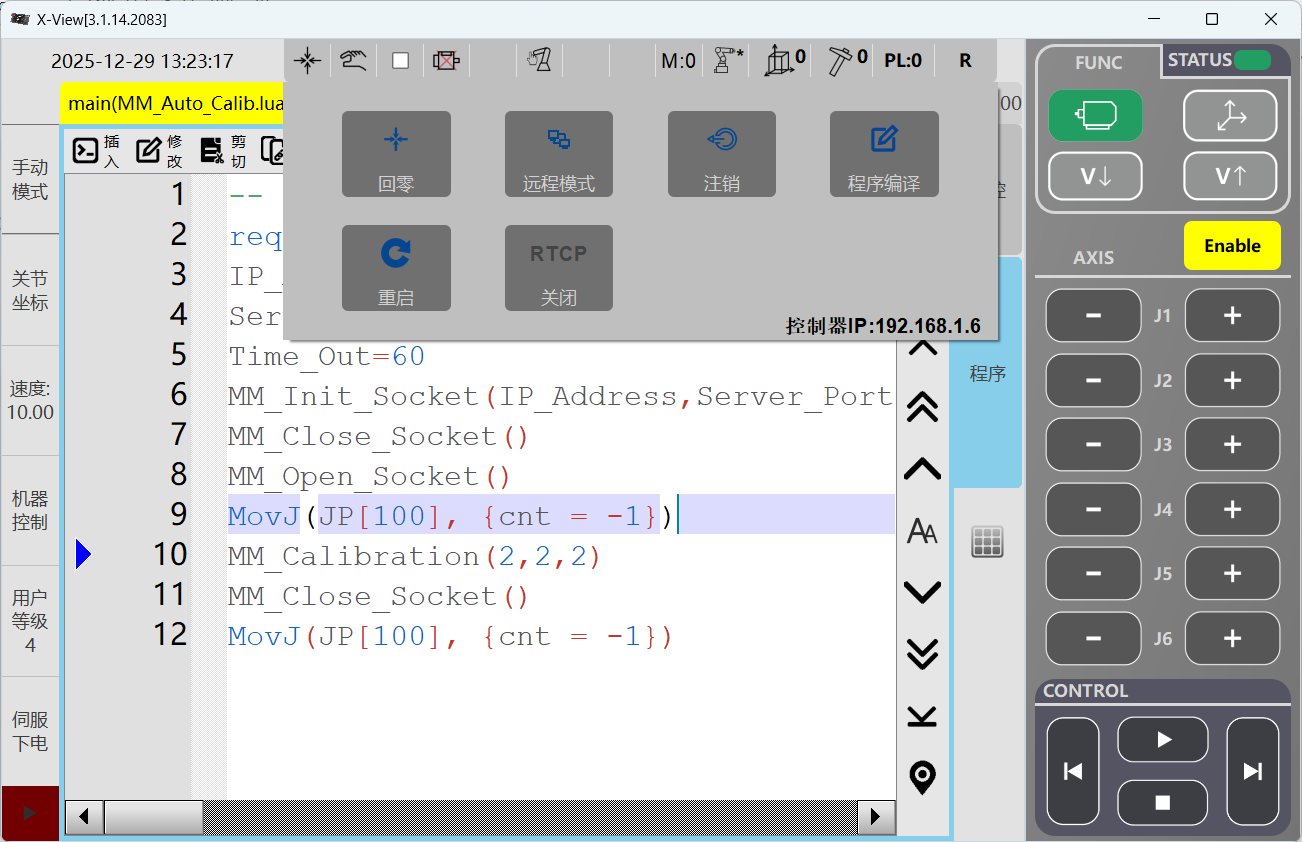
点击软件界面右上方机器人图标,在触发菜单中点击程序编译。
-
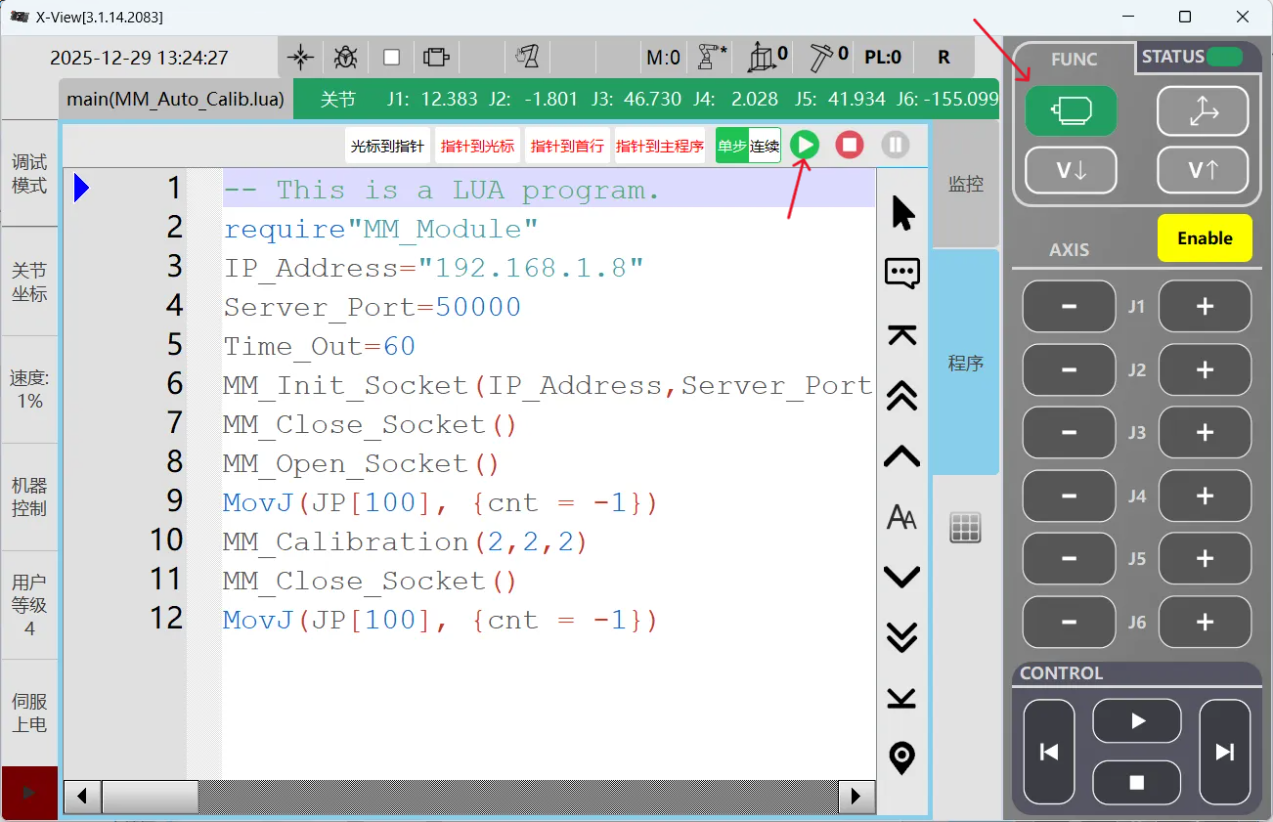
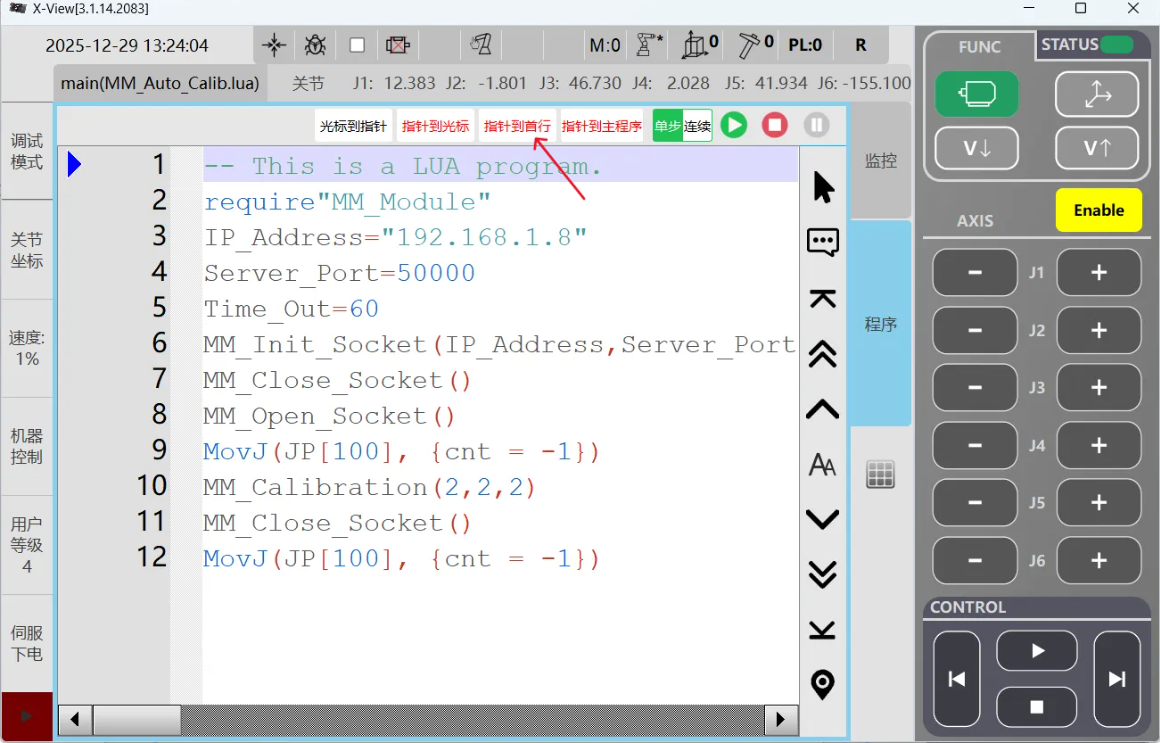
点击进入MM_Auto_Calib.lua编辑页面,切换至调试模式,点击指针到首行。
-
点击界面右上角FUNC模块下电机图标,机器人上电后点击右下角CONTROL区域运行按钮
 启动机器人程序。
启动机器人程序。