MELFA自动标定
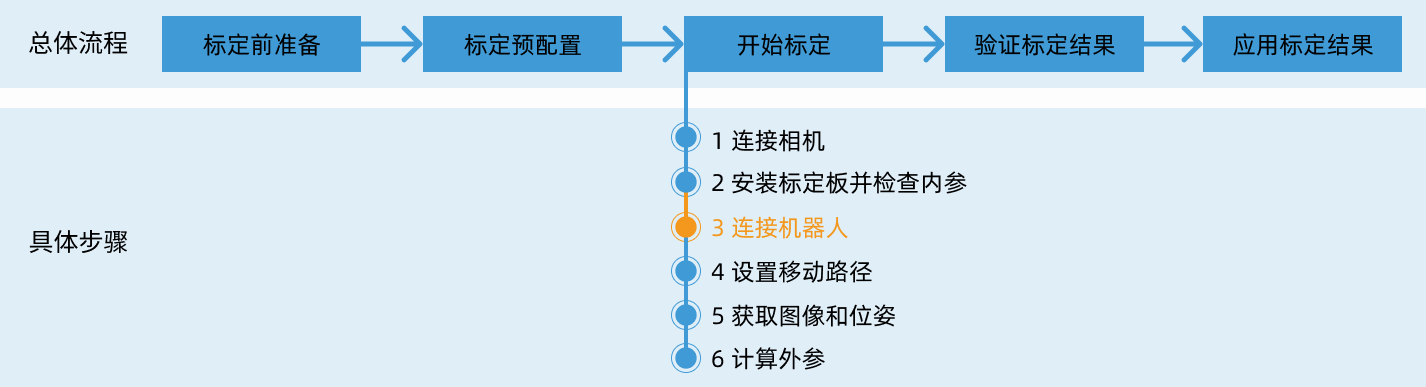
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
1. 选择和修改标定程序
-
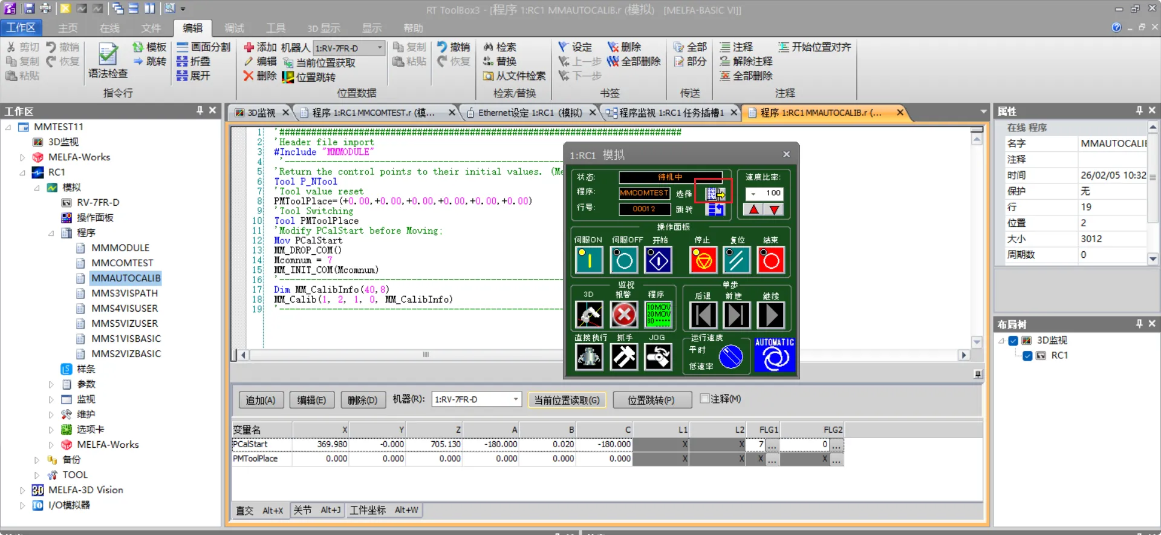
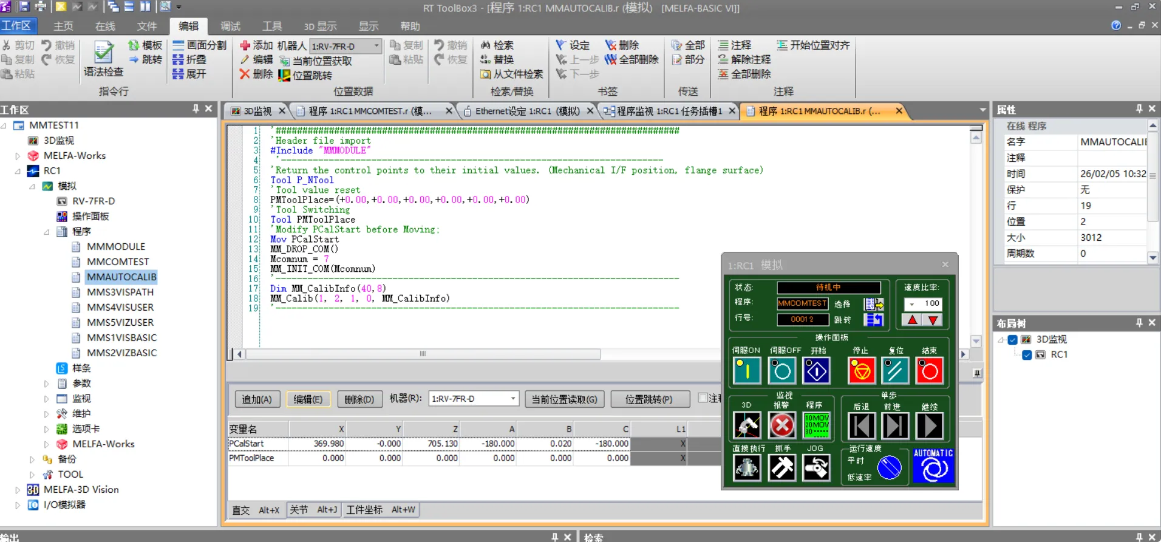
启动ToolBox3软件界面在工作区点击程序展开列表选择MMAUTOCALIB,打开程序界面。
-
打开MMAUTOCALIB程序界面后,单击界面下半部分选项栏中编辑,按机器人实际情况修改程序参数。
2. 示教标定起始点
-
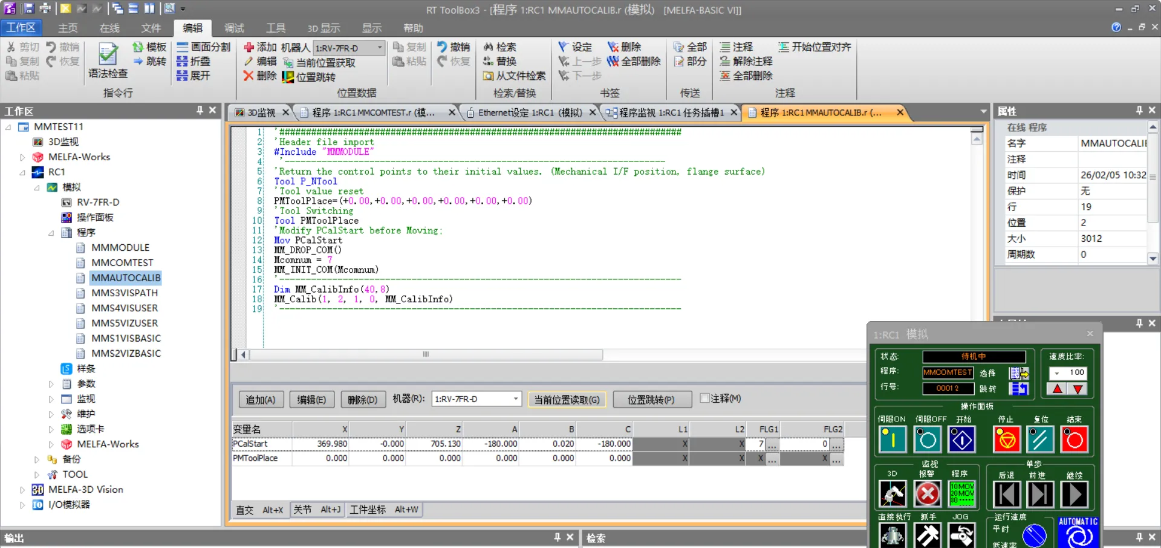
打开MMAUTOCALIB程序界面后,单击界面下半部分直交表格,选中变量PCalStart,单击当前位置读取。
-
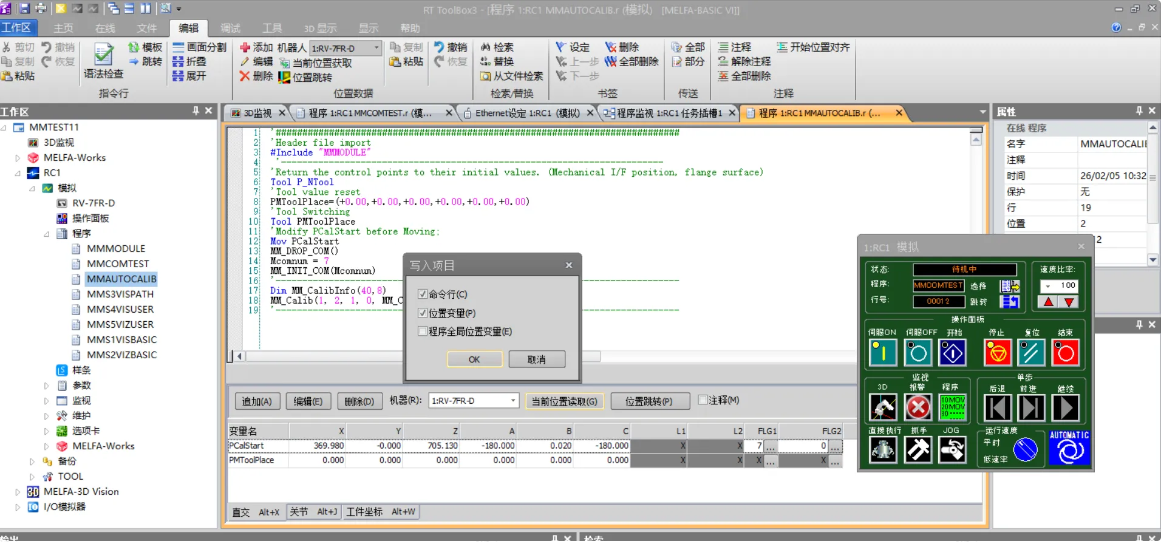
保存或者快捷键ctrl+s呼出写入项目弹窗,确认勾选修改过的选项,单击btn[OK]写入更新后的程序配置。