MELFA标准接口通信配置
本节介绍如何将机器人标准接口程序烧录到MELFA机器人,并完成梅卡曼德视觉系统与机器人的标准接口通信配置。
| 标准接口程序烧录是将机器人标准接口程序及配置文件导入到机器人系统中,从而建立视觉系统与机器人的标准接口通信。 |
烧录前准备
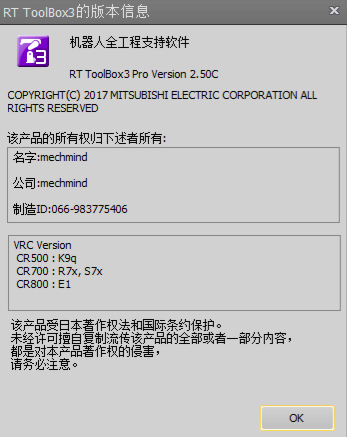
检查硬件和软件版本
软件版本:RT ToolBox3 Pro Version 2.50C
控制器版本:
-
CR500:K9q
-
CR700:R7x,S7x
-
CR800:E1
检查版本信息流程如下:
-
启动RT ToolBox3软件(简称“ToolBox3”)。
-
单击帮助菜单,选择版本信息即可。
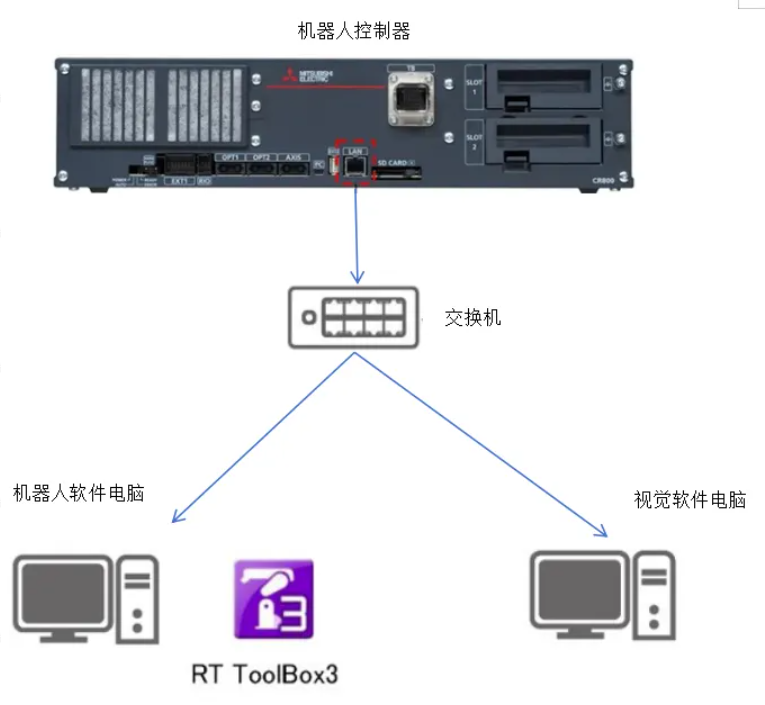
建立网络连接
设置IP地址
通过ToolBox3建立网络连接,流程如下:
-
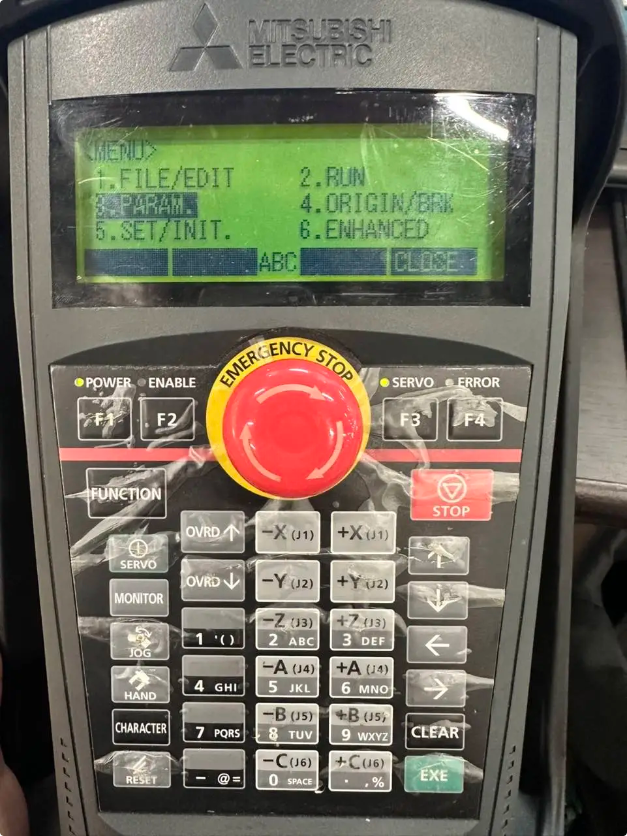
从示教器查看机器人IP地址:
-
在示教器主菜单找到PARAM点击EXE确定。
-
进入示教器PARAM页面,在NAME字段输入值NETIP,然后点击EXE确定。

-
如图所示,DATA区域显示机器人IP地址。

-
|
注意:在无法使用示教器,或者无法确人机器人IP的情况下,可以使用带有mini B接头的USB线缆(如下图所示)直接连接机器人。 
|
-
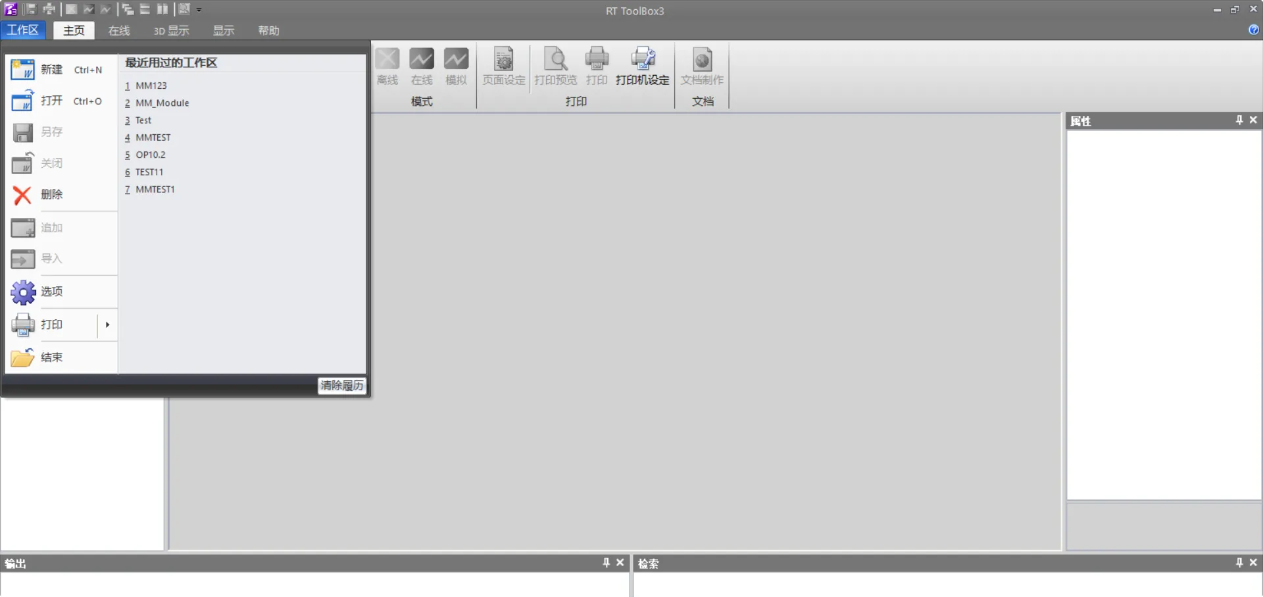
在ToolBox3创建机器人工程:
-
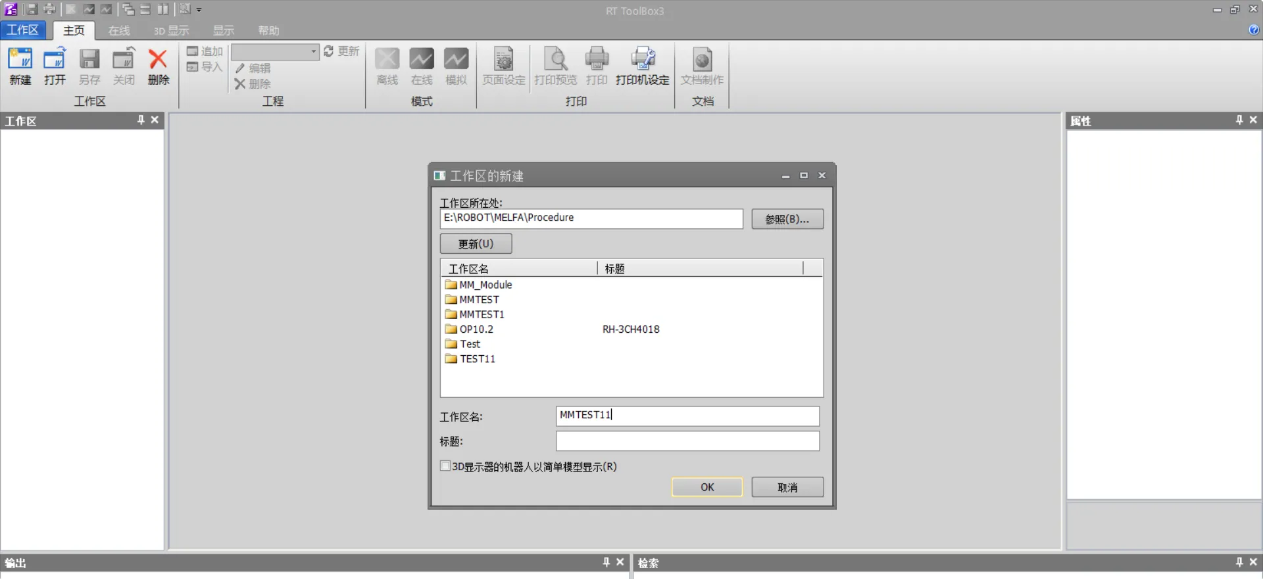
启动ToolBox3,单击工作区呼出主菜单,单击新建。
-
在弹出窗口选择新建工作区的路径,编辑工作区名称,然后单击OK确认完成创建。
-
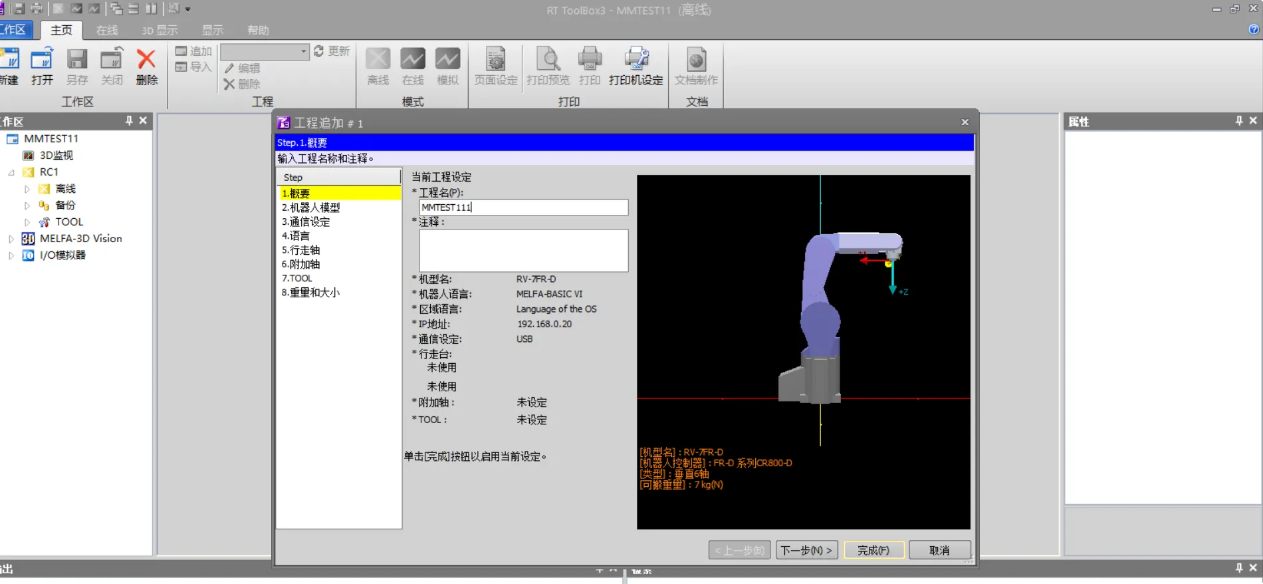
创建完工作区后,界面弹出工程追加窗口的概要步骤,输入工程名然后单击下一步。
-
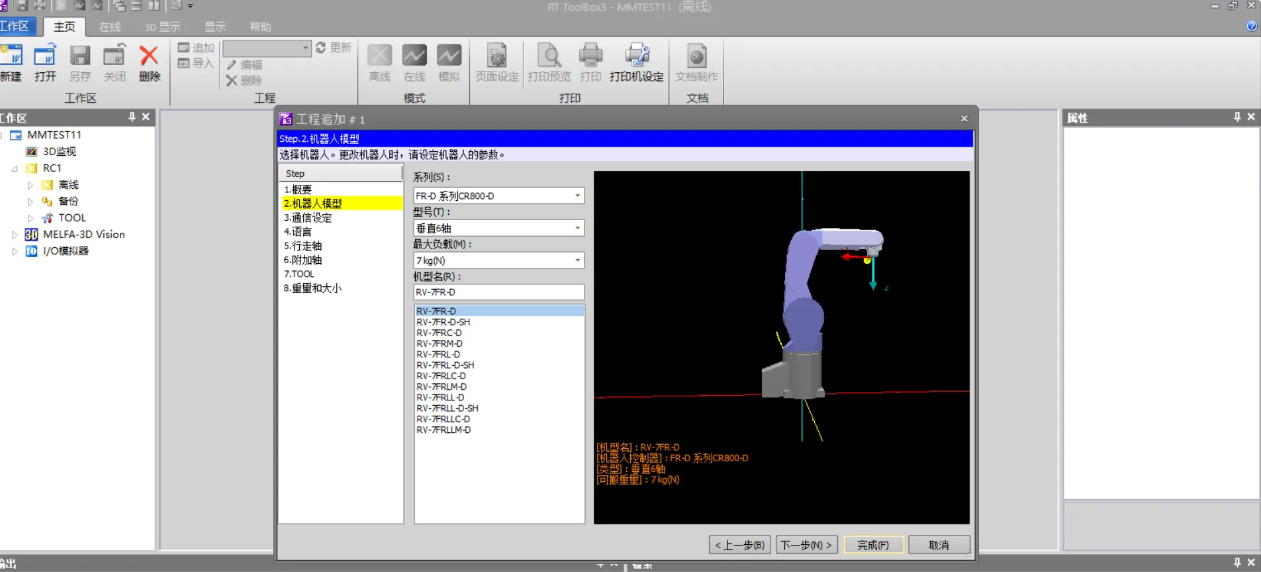
在机器人模型步骤,按实际使用的机器人信息填写当前步骤选项,然后单击下一步。
-
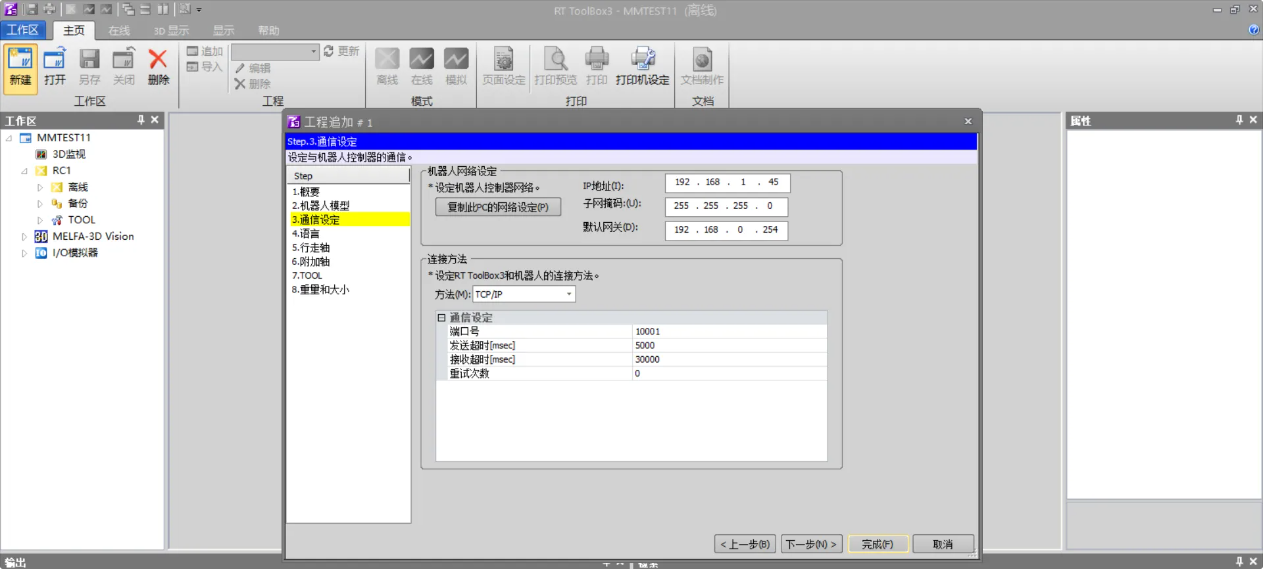
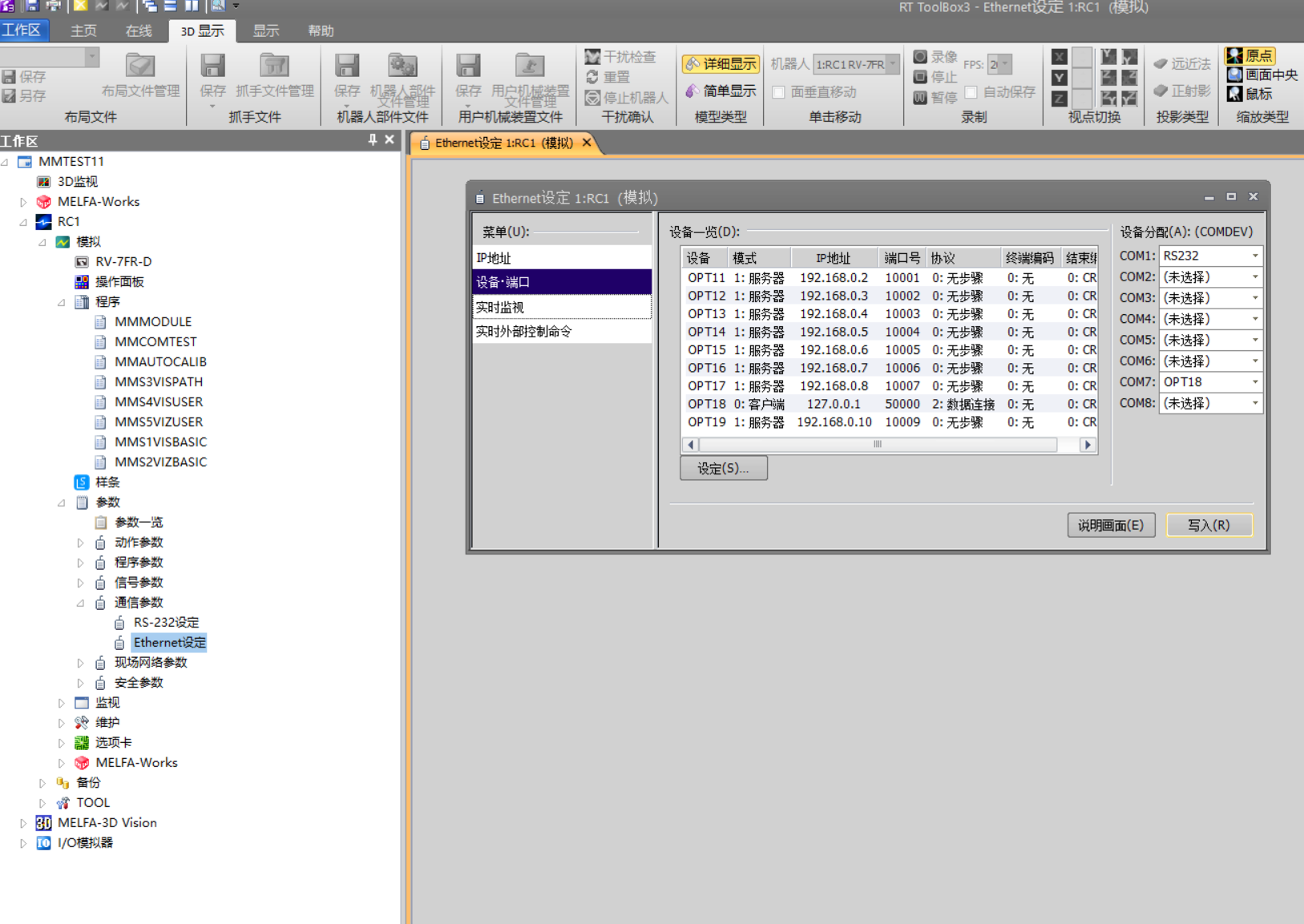
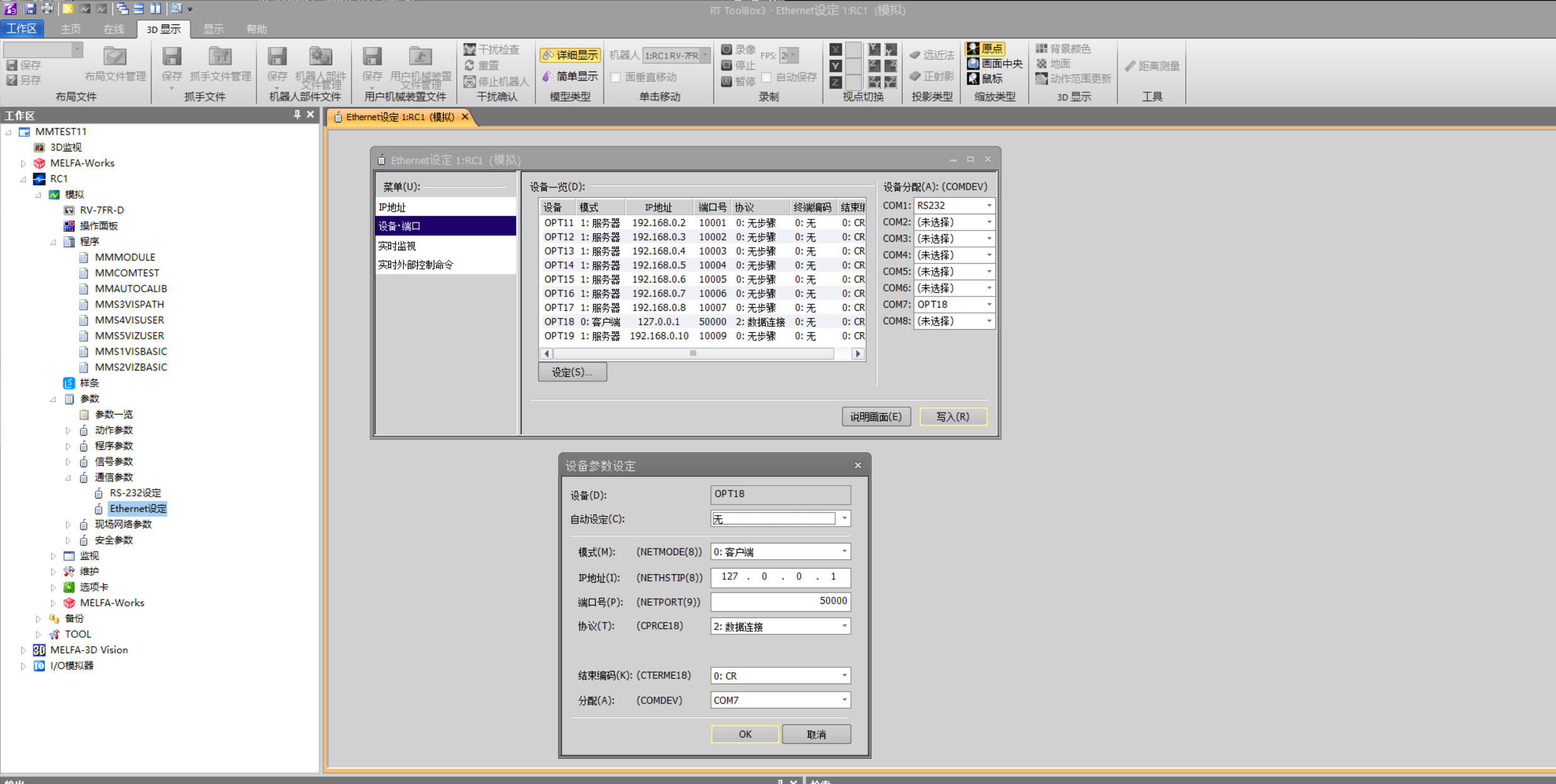
在通信设定步骤,修改IP地址(通过示教器查看)和TCP服务端口号,然后单击下一步。
-
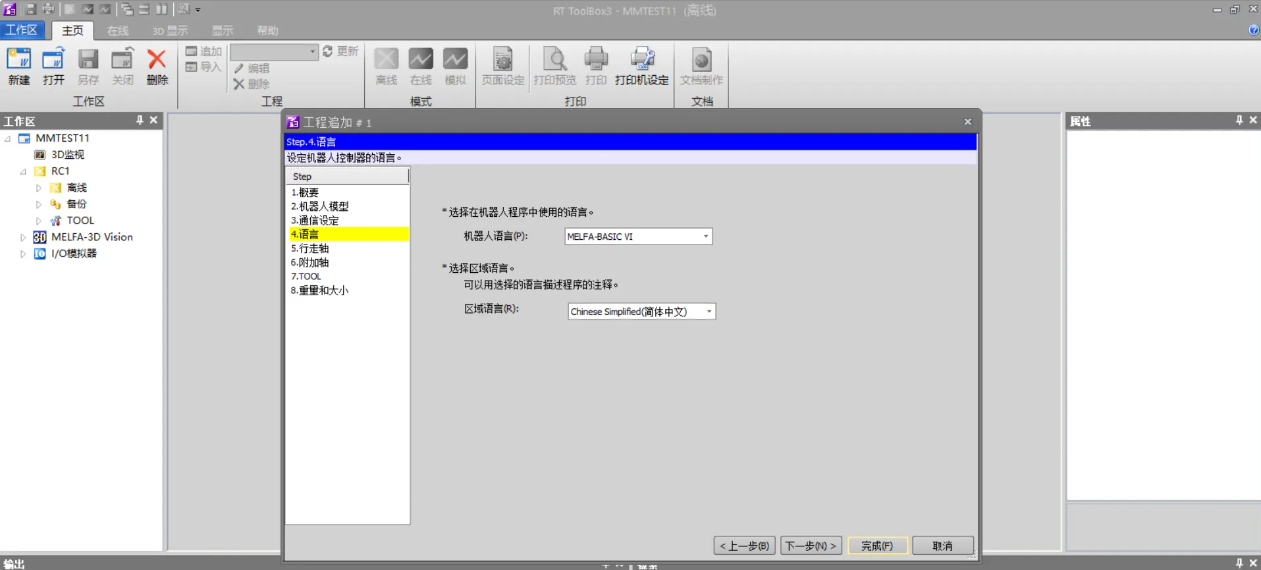
在语言步骤,根据工程需求选择机器人语言和区域语言2,然后单击完成按钮创建工程。
-
备份机器人文件
-
在ToolBox3界面左侧工作区/工程名称/机器人名称/备份路径,右键单击备份文件夹,选择在线工程备份单击。
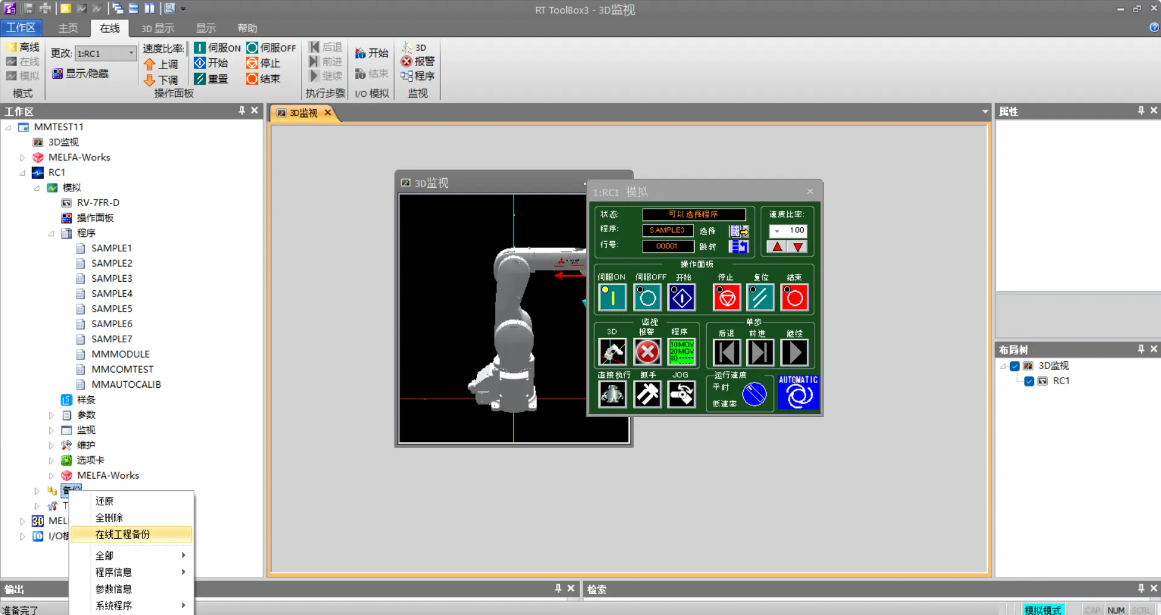
-
在在线工程备份页面确认备份信息为全部,添加注释和修改文件夹名(如需),然后单击OK按钮。
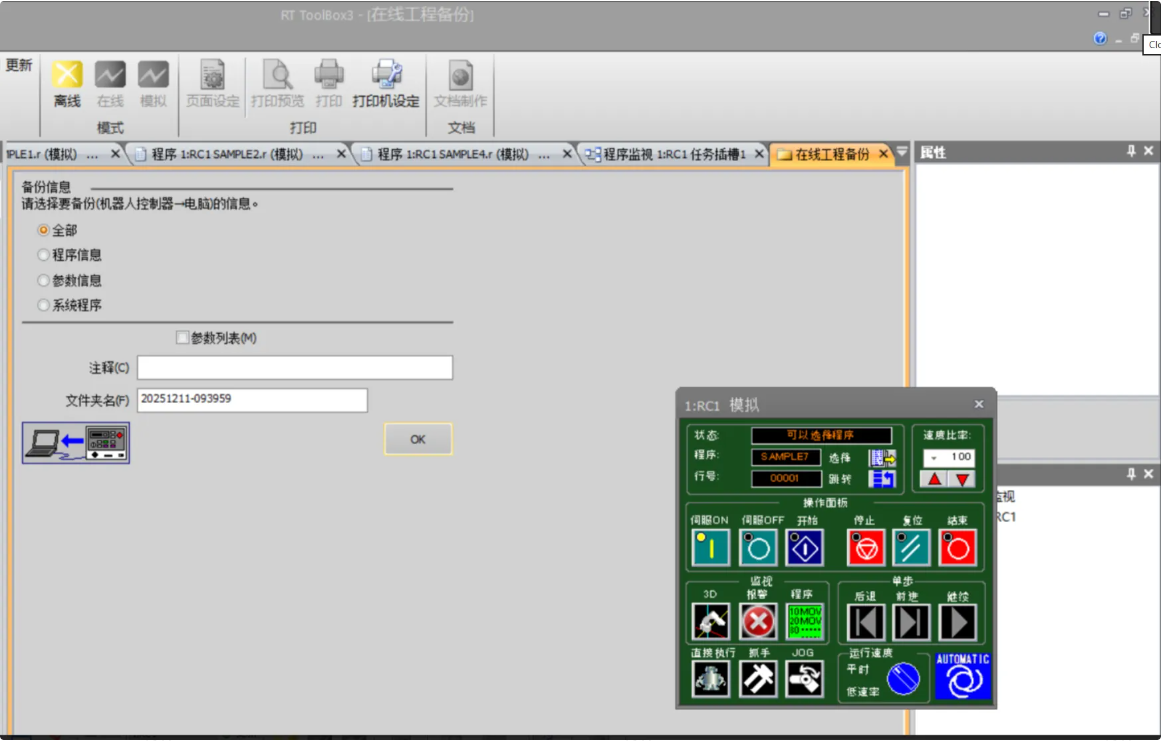
-
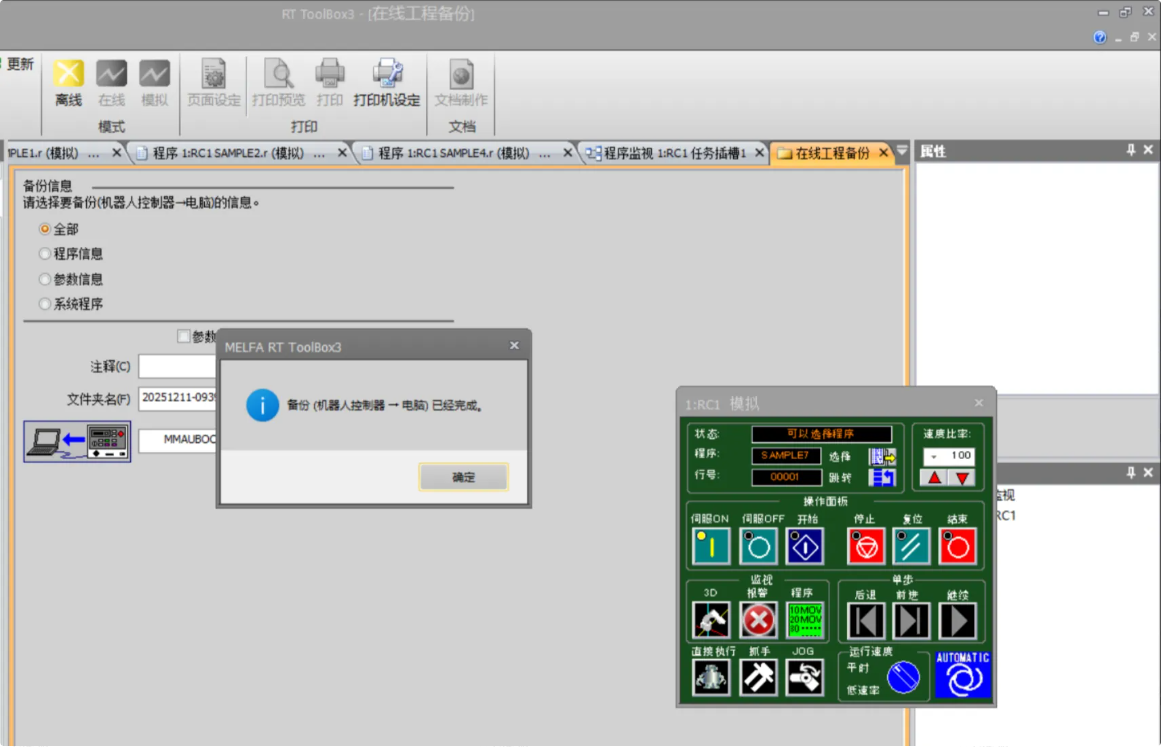
ToolBox3弹出备份完成信息表示备份成功。
-
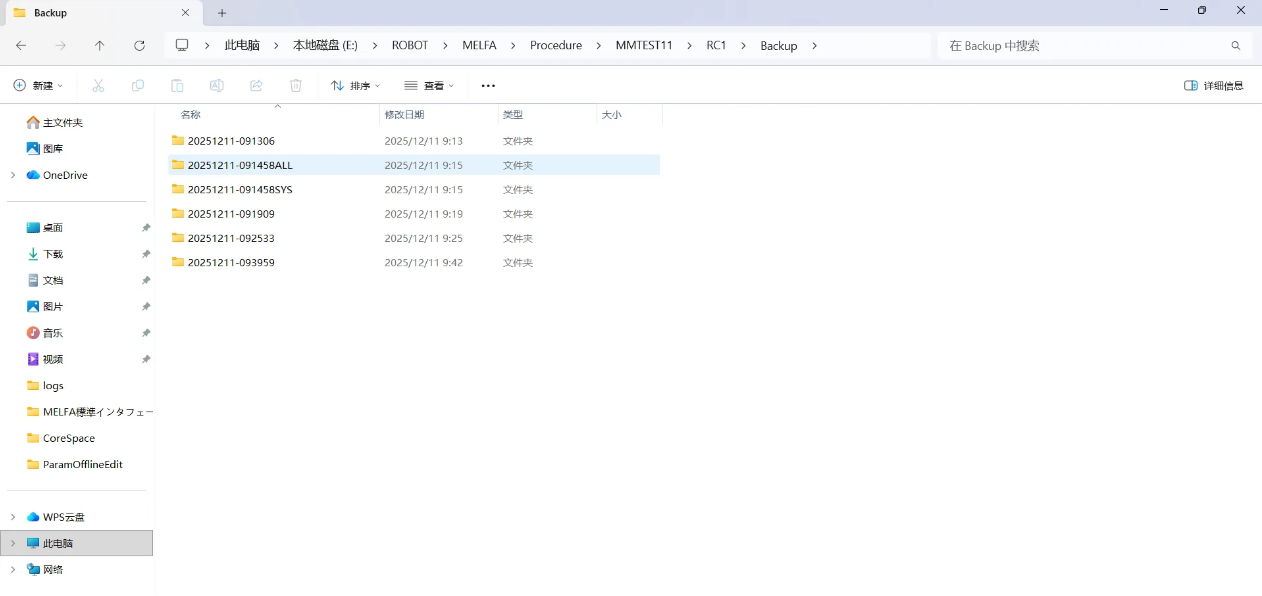
保存的备份文件可以在工程文件中的Backup文件夹中找到,如果没有编辑备份文件夹名,默认备份文件夹将以操作日期和时间命名。
设置“机器人通信配置”
-
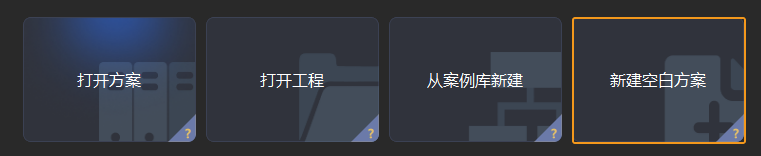
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
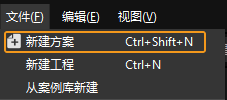
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
端口号建议设置为50000或50000以上。确保设置的端口号未被其他程序占用。
-
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
-
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

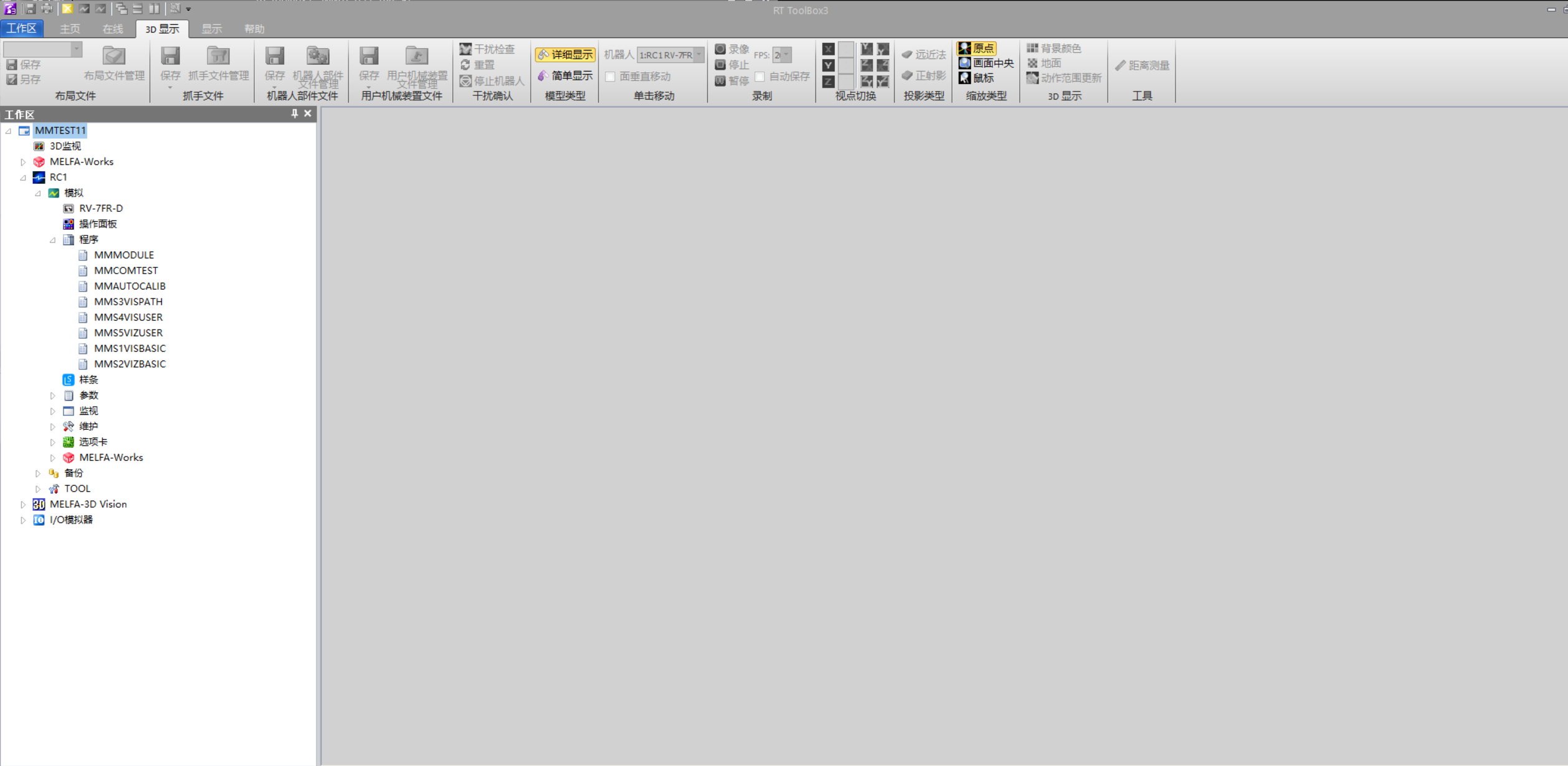
烧录文件至机器人中
-
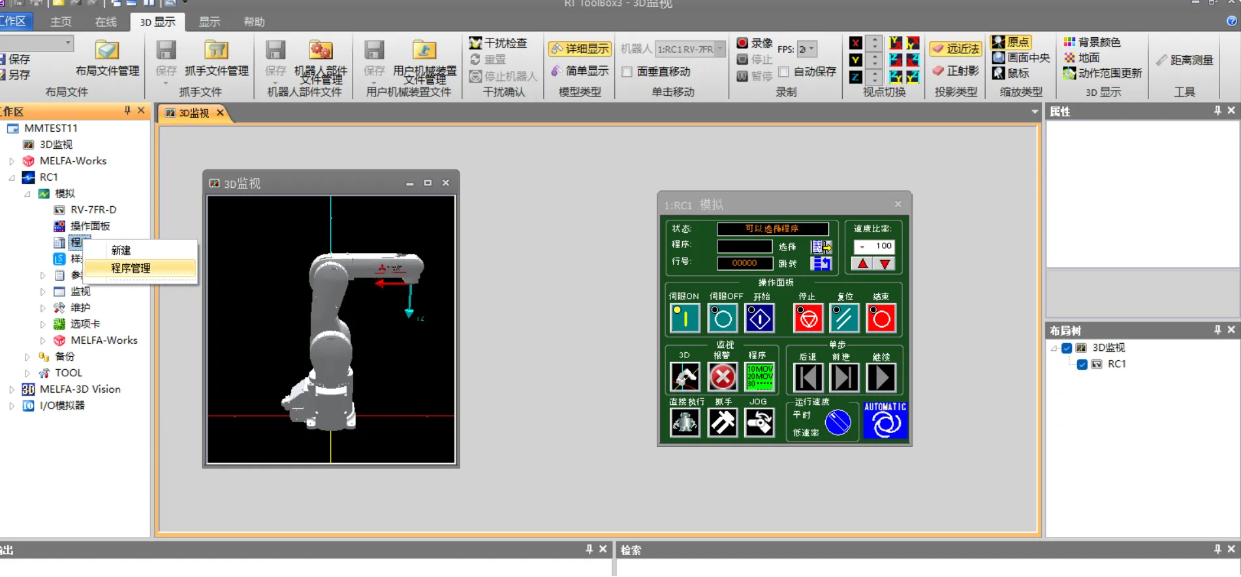
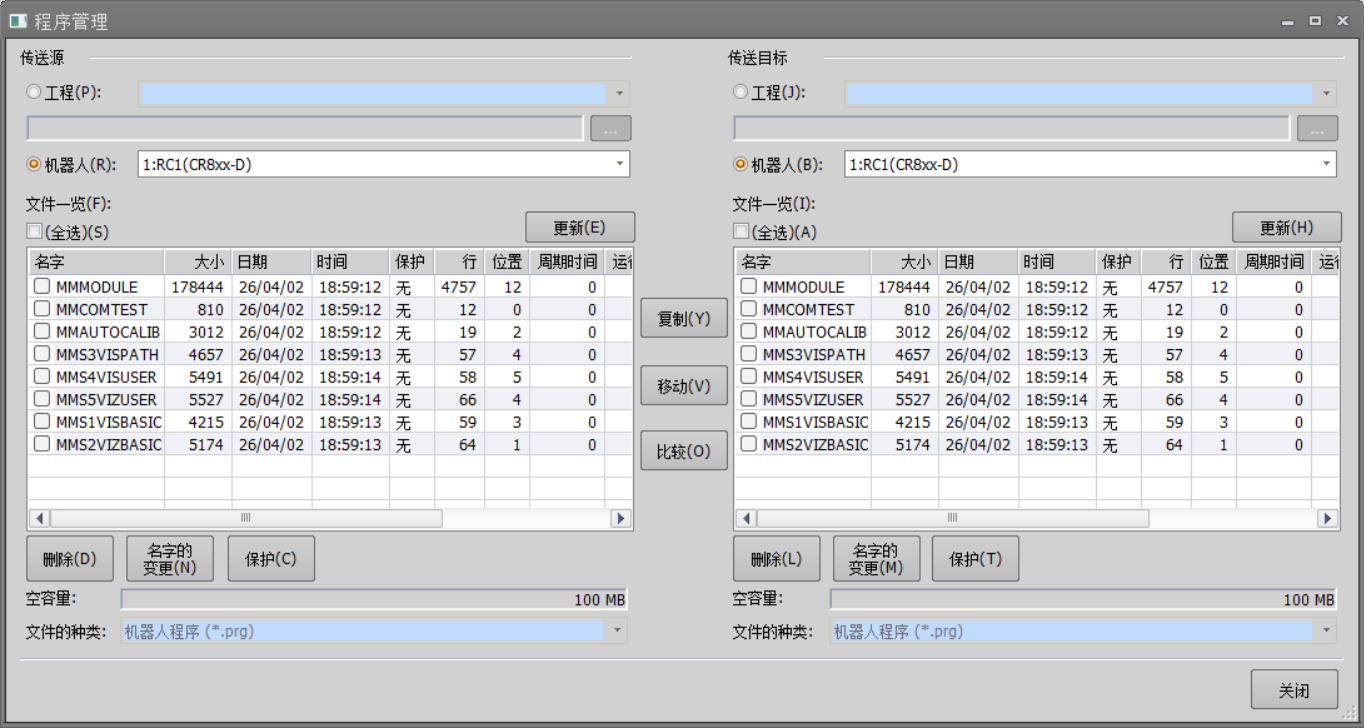
启动ToolBox3,界面左侧工作区/工程名称/机器人名称/模拟路径找到程序选项,右键单击呼出菜单,选择程序管理单击打开。
-
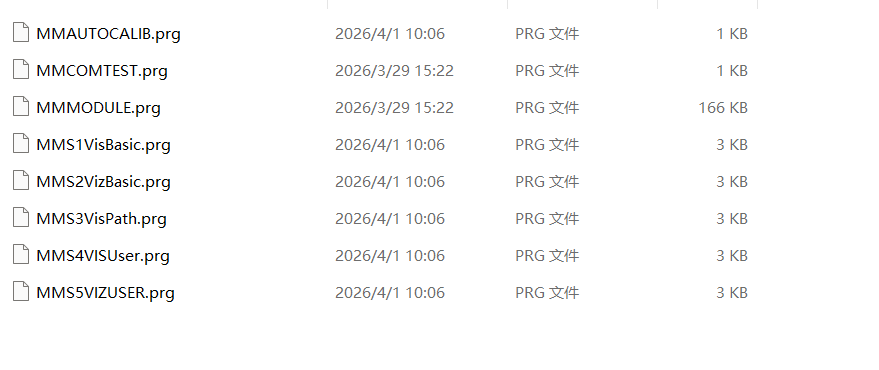
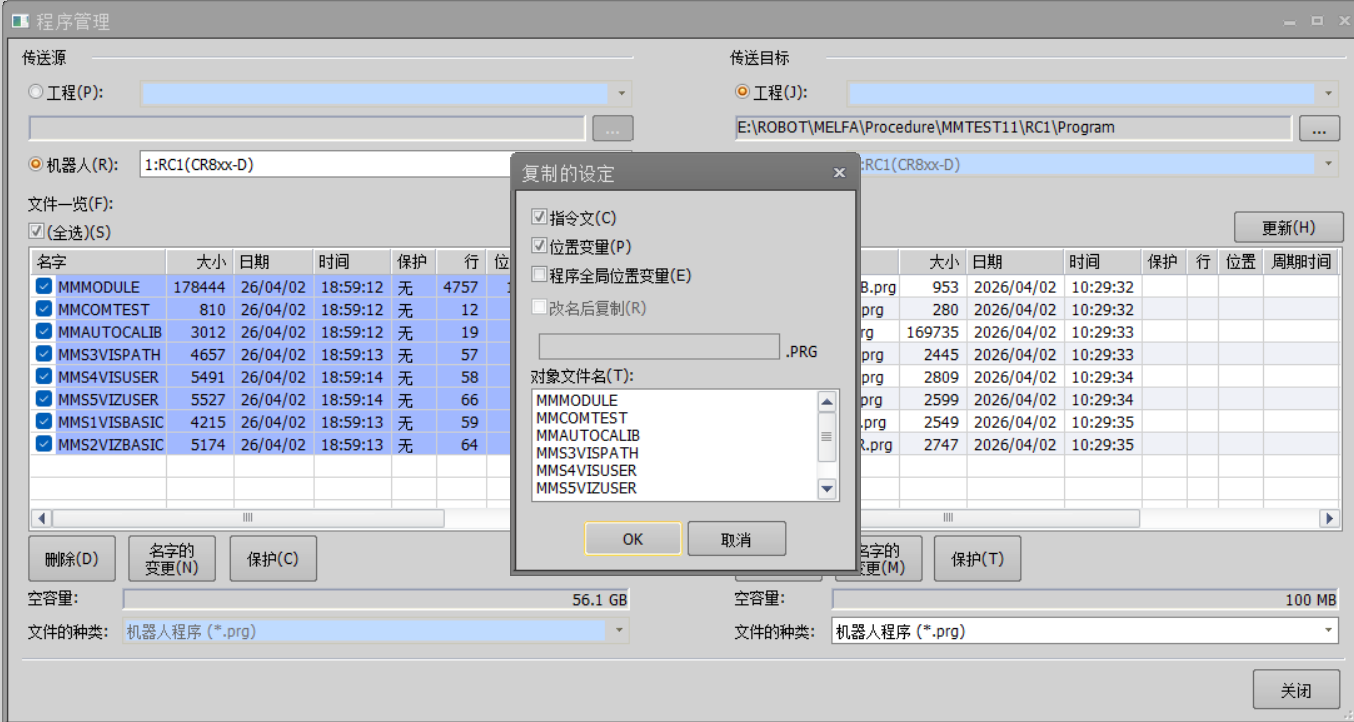
在程序管理页面传送源区域选择工程,单击…选择存放烧录文件的路径,在文件一览区域确认烧录文件列表。
-
确认无误后,勾选(全选)选中列表中所有烧录文件,单击界面中间复制呼出弹窗,再次确认复制对象无误后单击OK完成烧录。
-
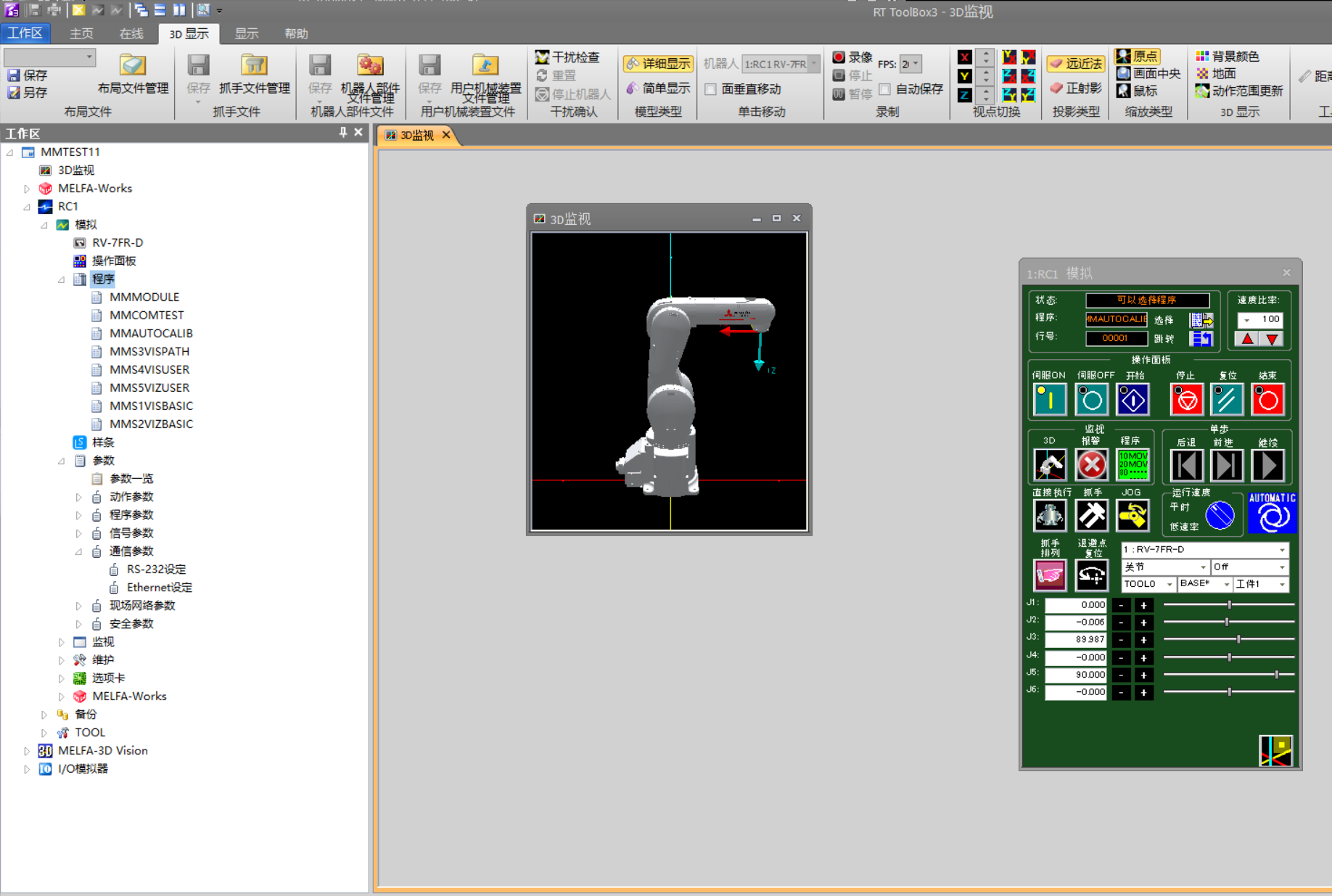
确认烧录文件已经录入工作区/工程名称/机器人名称/模拟/程序路径下。
测试标准接口通信
-
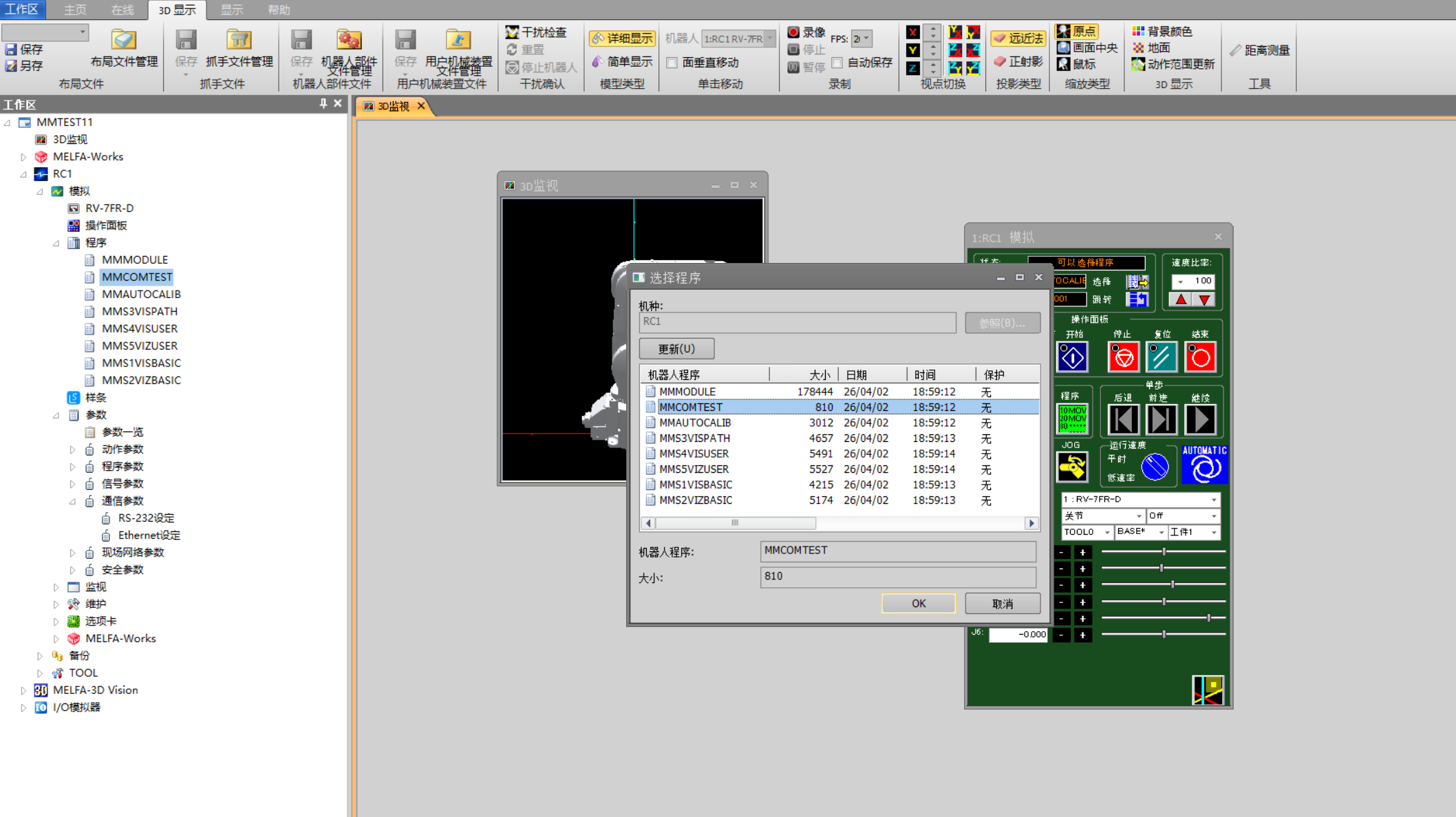
在机器人控制面板单击选择,呼出ToolBox3界面选择程序弹窗。

-
在ToolBox3软件选择程序弹窗选择MMCOMTEST程序,单击OK。
-
测试程序将会自动运行,Mech-Vision返回对应的状态信息。
-
当连接成功时,Mech-Vision返回的状态信息如下图所示:
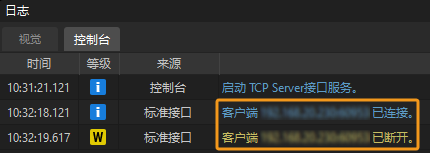
|
连接测试仅作测试目的,一旦建立成功,连接将自动断开。您可以在Mech-Vision日志窗口的控制台标签页下看到客户端已连接和客户端已断开的日志。 |