样例程序1:获取Mech-Vision视觉结果
程序简介
功能说明 |
机器人触发Mech-Vision工程运行,然后获取视觉结果,进而执行抓取。 |
所需工程 |
Mech-Vision工程 |
使用前提 |
|
| 此样例程序仅是示例程序。用户需根据实际情况在此基础上进行修改,请勿直接使用该程序。 |
程序解读
以下为搭建的示例程序,仅供参考。
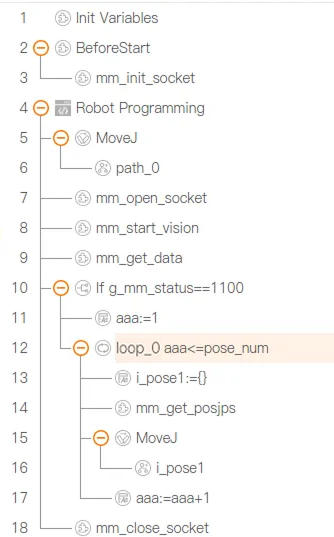
下表为上述程序的逻辑解读。用户单击指令名称的超链接便可查看该指令的详细说明。
| 流程 | 代码及说明 | ||
|---|---|---|---|
初始化通信参数 |
mm_init_socket:初始化通信的指令,参数如下。 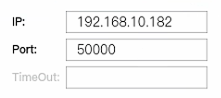
因此,整条指令表示,机器人通过mm_init_socket指令指定通信对象(工控机)的IP地址和端口号。
|
||
移动到拍照点 |
|
||
建立通信 |
机器人通过mm_open_socket指令与视觉系统之间建立TCP协议通信连接。 |
||
触发运行Mech-Vision工程 |
mm_start_vision:触发运行Mech-Vision工程的指令,参数如下。 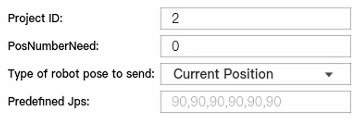
因此,整条指令表示机器人触发视觉系统运行编号为2的Mech-Vision工程,且期望Mech-Vision工程返回所有视觉点。 |
||
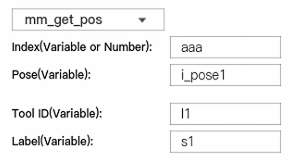
获取视觉结果 |
mm_get_data:获取数据的指令,参数如下。 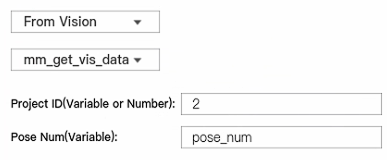
因此,整条指令表示机器人获取Mech-Vision工程2返回的视觉结果。
|
||
转存视觉结果,并移动至抓取点 |
当状态码g_mm_status为1100时,则机器人成功获取到所有视觉结果;否则视觉系统发生异常。用户可根据具体异常状态码做相应的处理。
|
||
关闭通信 |
机器人通过mm_close_socket指令断开与视觉系统之间的TCP协议通信连接。 |