AUBO(ARCS)自动标定
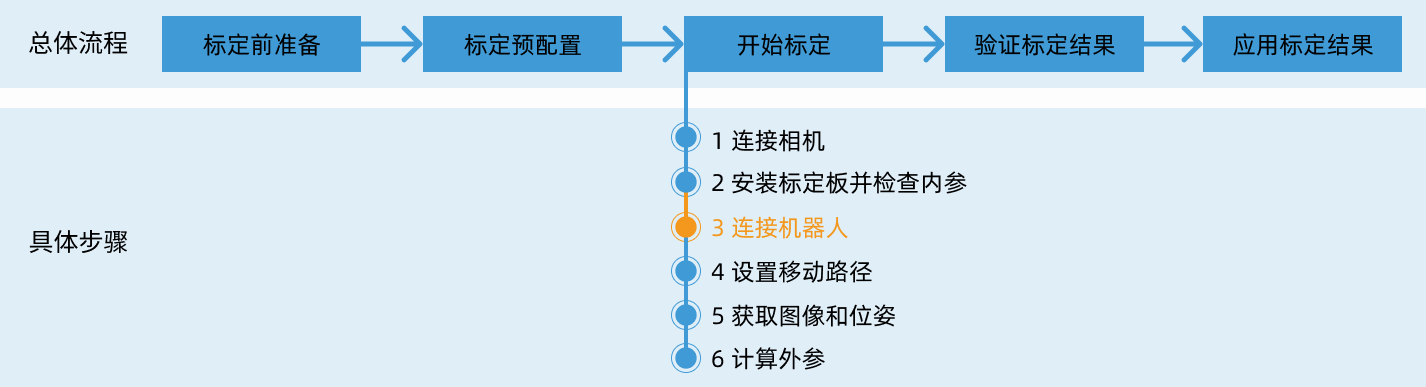
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
1. 创建标定程序
-
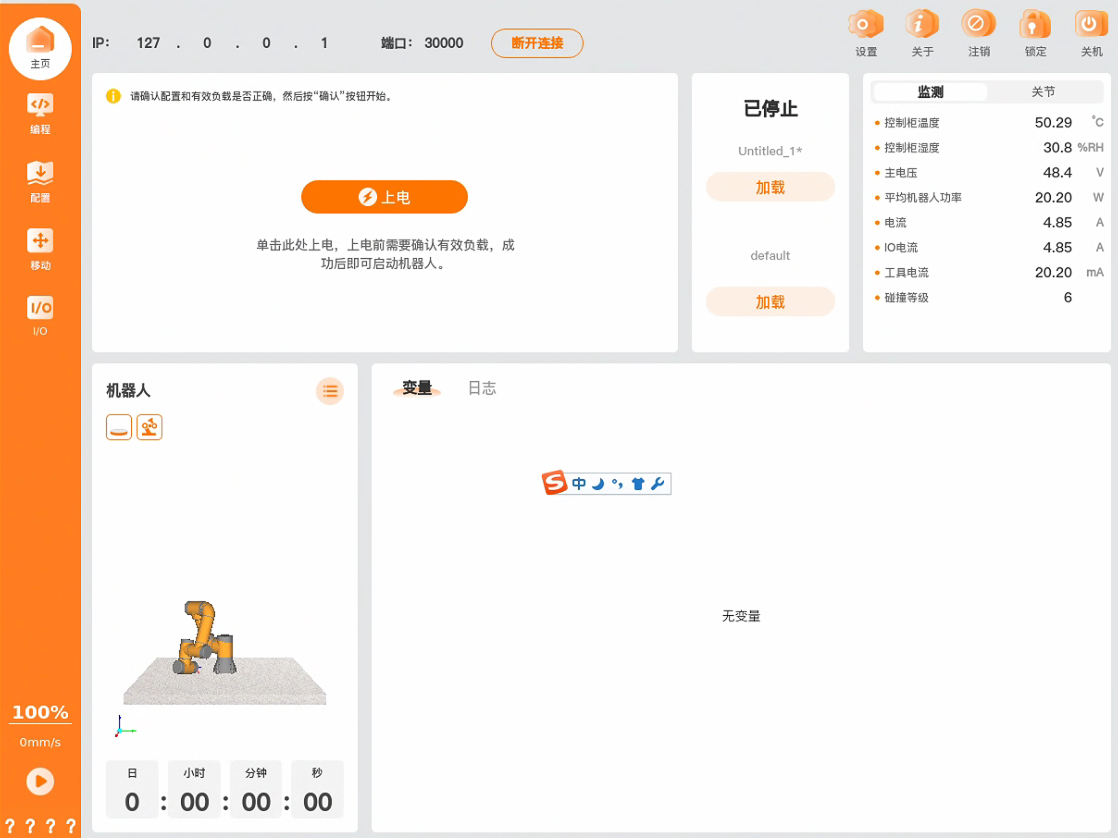
若机器人未上电,请在示教器的主页界面,点击上电,确认有效负载后,依次点击。若机器人已上电,请忽略本步操作,继续执行下一步。
-
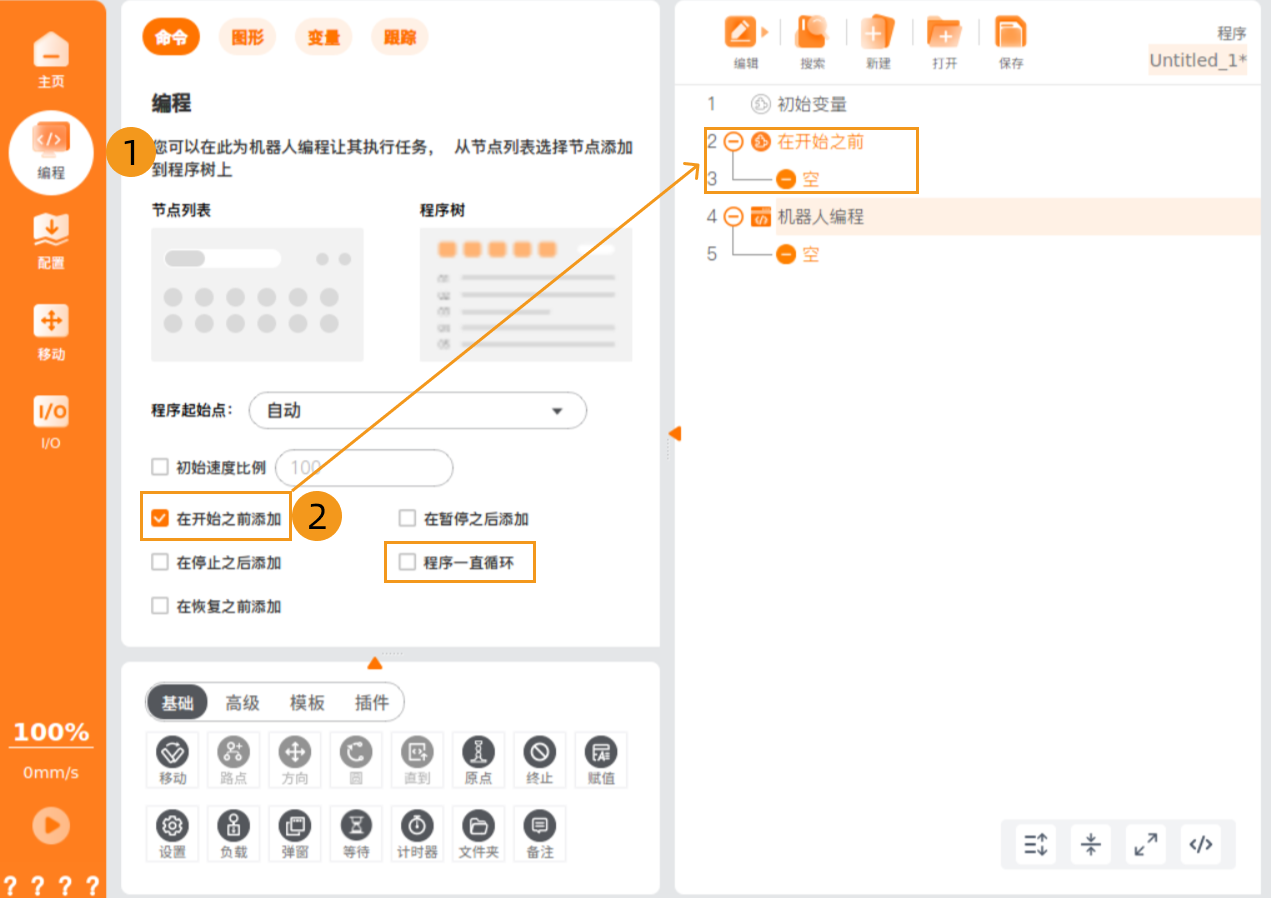
在示教器界面中,点击编程,勾选在开始之前添加,取消勾选程序一直循环。在右侧程序界面,将出现在开始之前程序段。
-
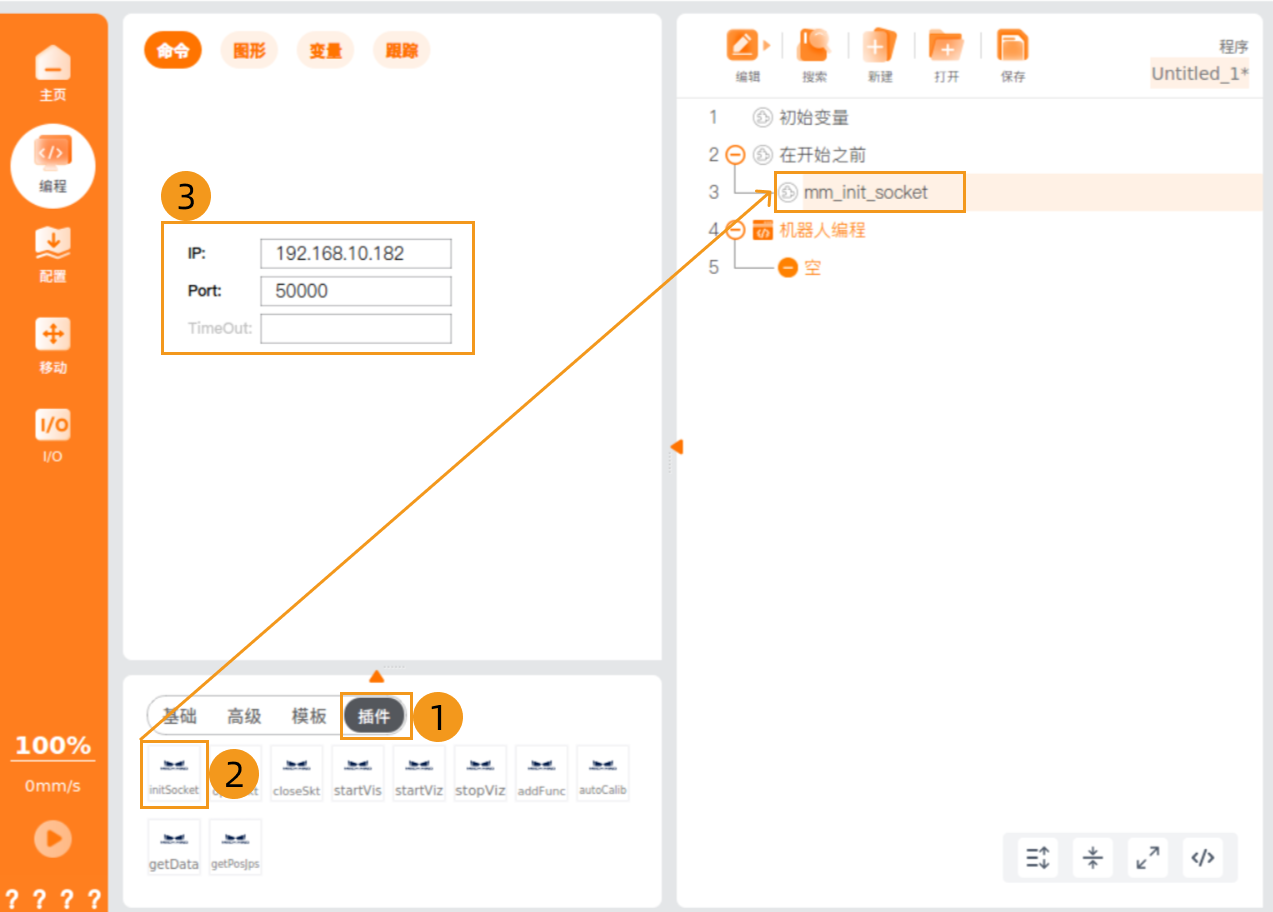
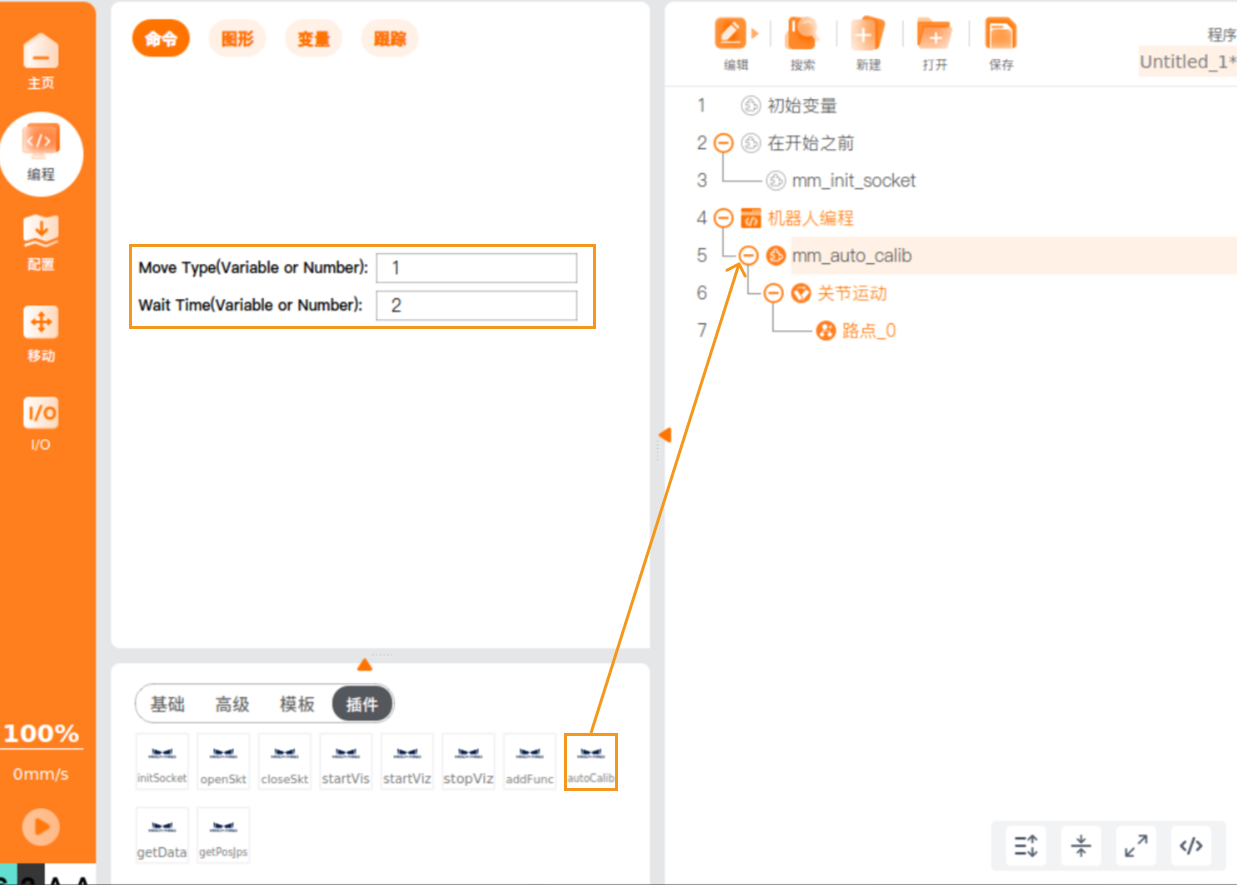
点击插件,选中在开始之前下的空,点击initSocket,将mm_init_socket添加至程序中。在命令选项卡下,IP处填写工控机IP地址,Port处填写Mech-Vision软件中设置的主机端口号。
-
在机器人编程下,点击autoCalib,将mm_auto_calib添加至程序中。根据实际情况填写Move Type和Wait Time,详细参数解释可参考autoCalib指令。
2. 示教标定起始点
-
在编程界面中,依次点击。

-
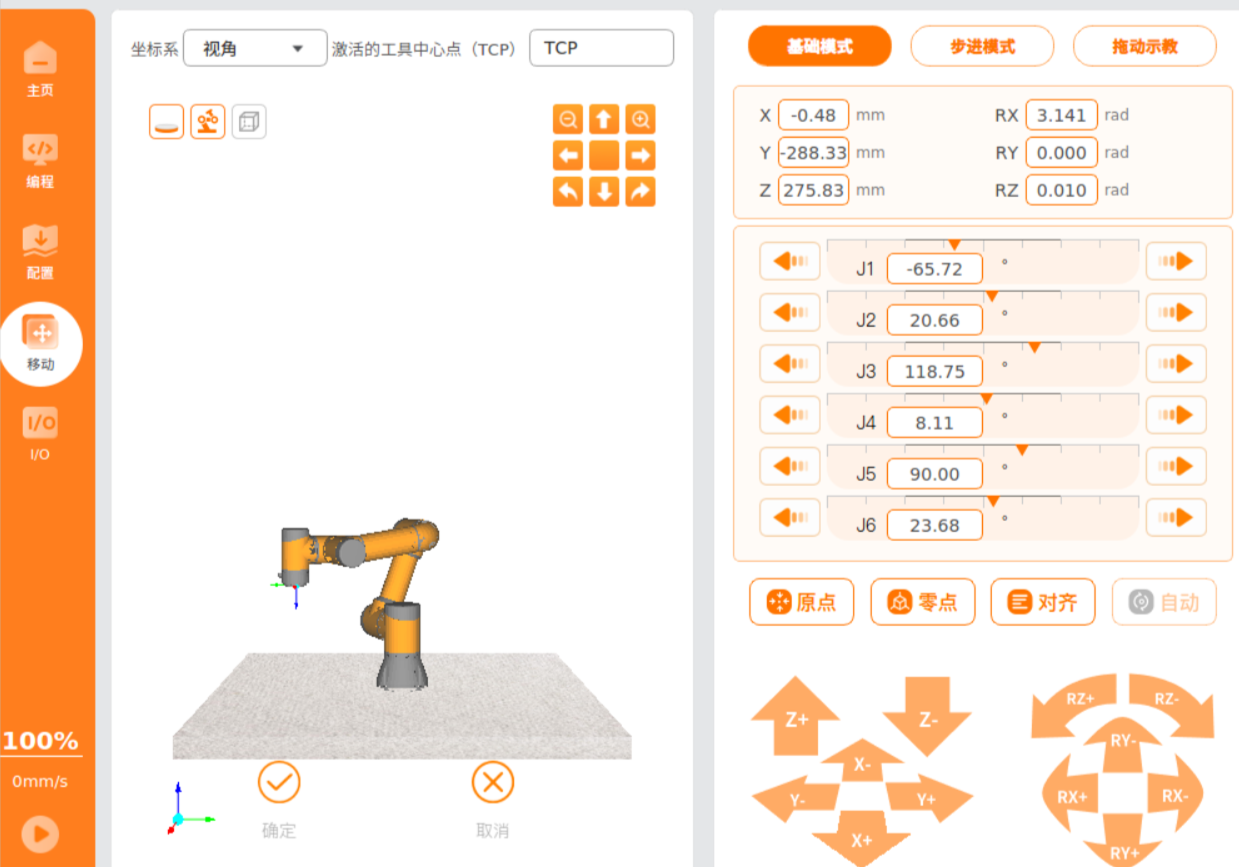
在如下界面中,将机器人移动到标定起始点位置,然后点击确定,返回编程界面。此时路点_0就是标定起始点。
标定起始点位置可以直接选用在检查标定板位置和点云质量时机器人所处的位置。
-
点击保存,以保存上述程序。


