UR E 시리즈(Polyscope X 10.4 및 이상) 자동 캘리브레이션
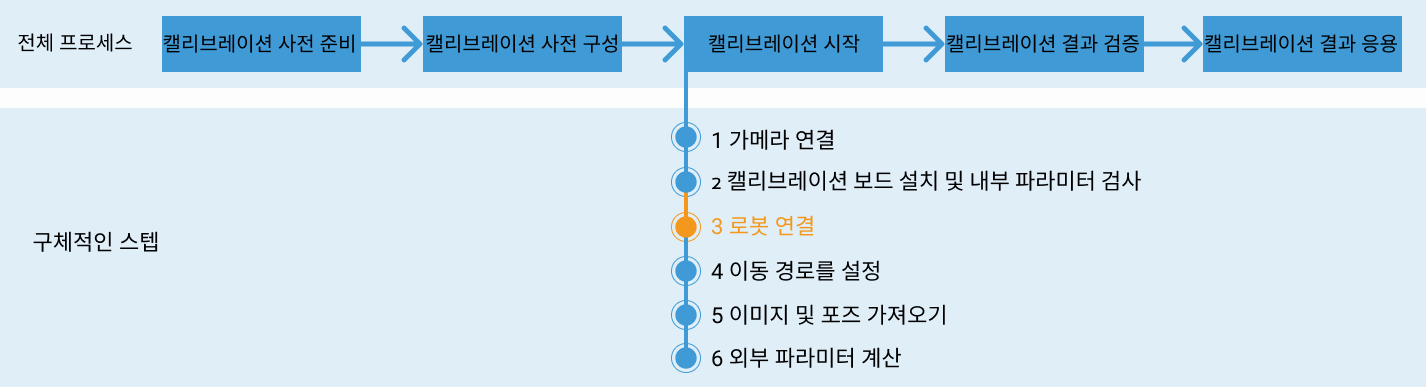
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고사항
캘리브레이션을 실행할 때 "로봇을 연결하기" 스텝에서 Mech-Vision 소프트웨어 화면에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 스텝을 진행하십시오.
|
1: 캘리브레이션 프로그램을 만들기
-
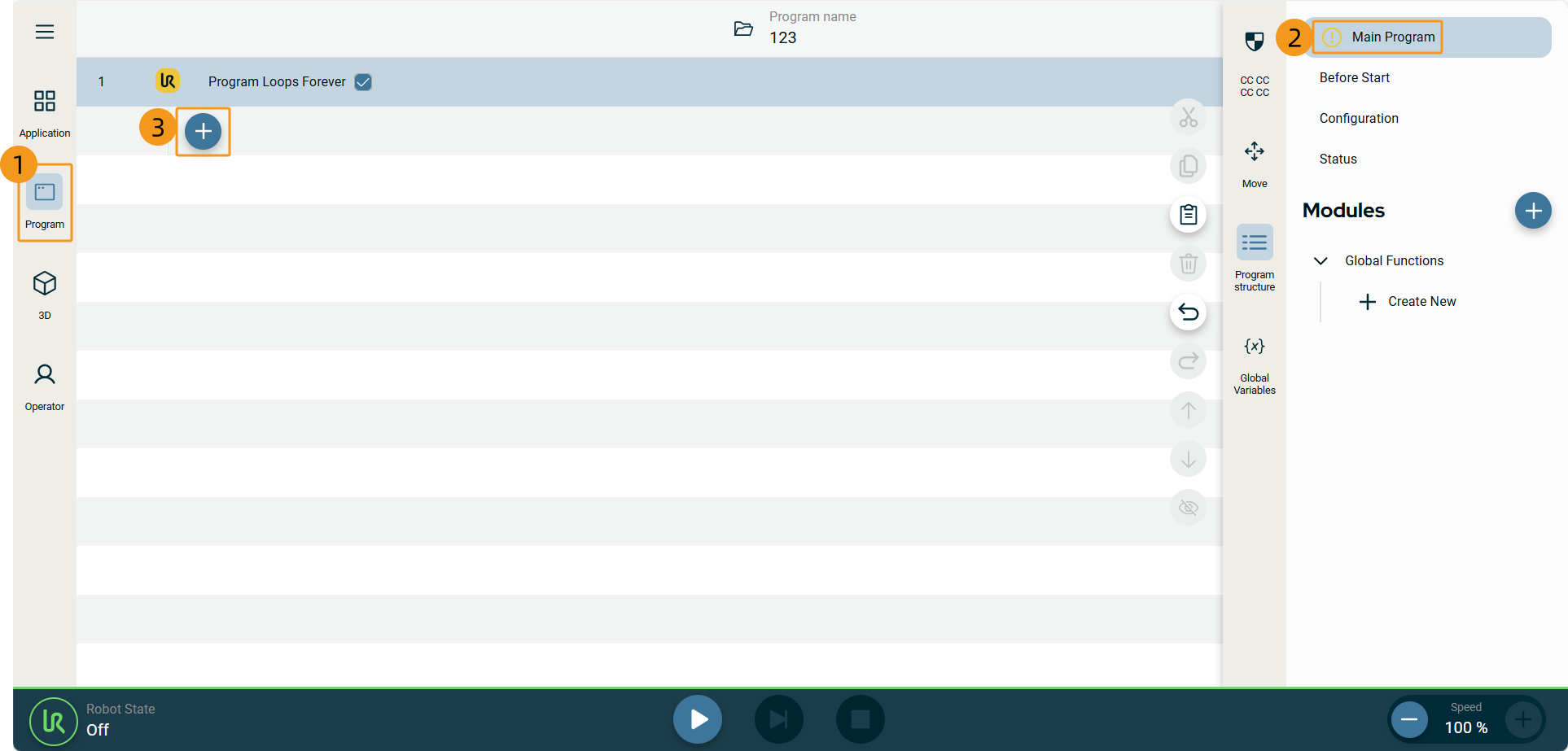
티치 펜던트 인터페이스에서 차례로 버튼을 클릭하십시오.
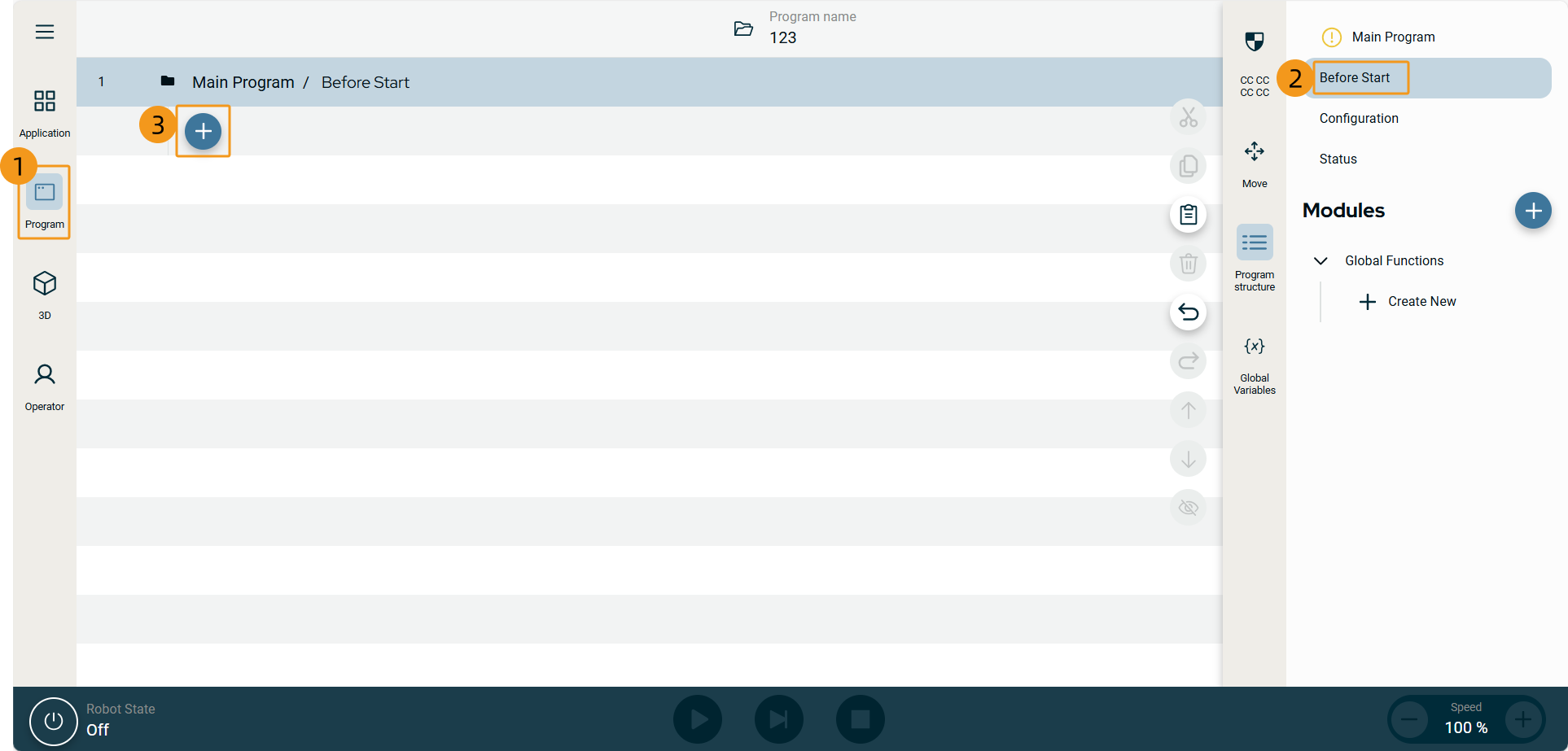
-
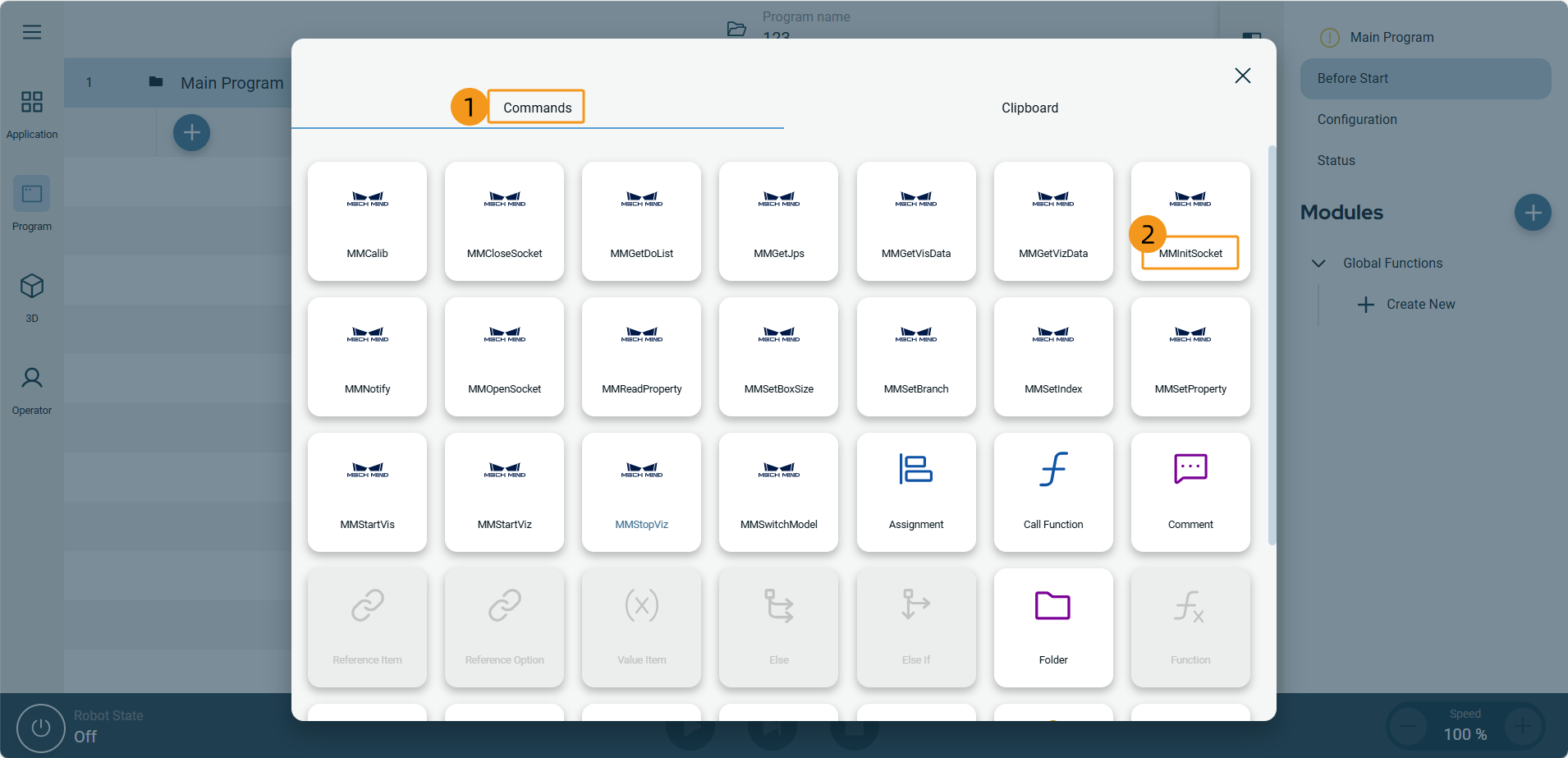
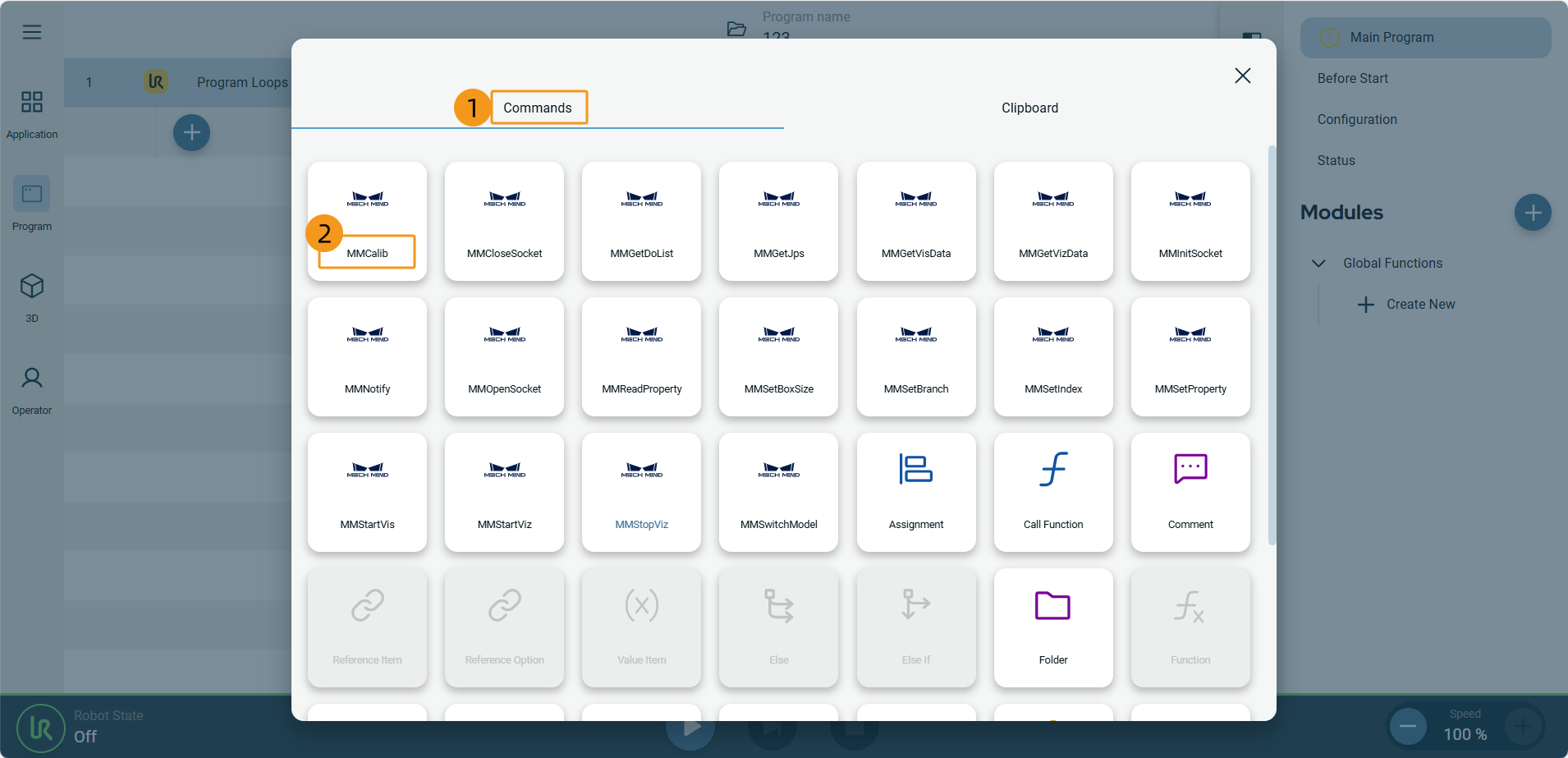
Commands클릭하여 MMInitSocket를 선택하십시오.
-
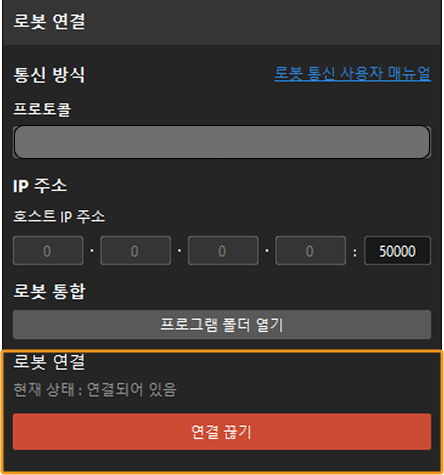
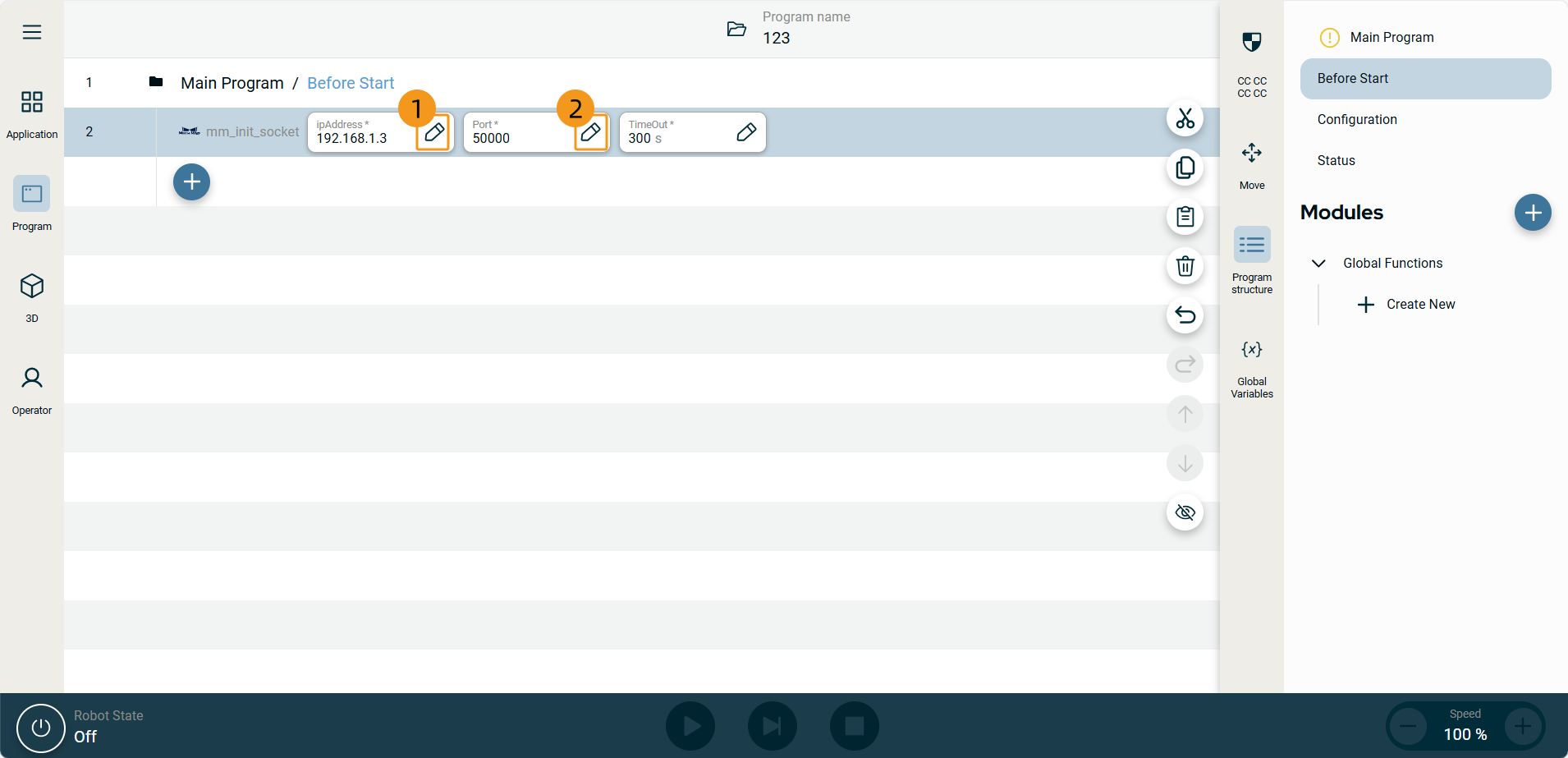
아래 화면에서 명령어 내 ipAddress를 IPC의 IP 주소로 변경하고 Port를 50000으로 설정합니다 (Mech-Vision에서 설정한 호스트 포트 번호와 반드시 일치해야 합니다). 설정이 완료되면,ipAddress 및Port항목 아래에 설정된 IPC의 IP 주소와 포트 번호가 표시됩니다.
-
티치 펜던트 인터페이스에서 차례로 버튼을 클릭하십시오.
-
Commands클릭하여 MMCalib를 선택하십시오.
-
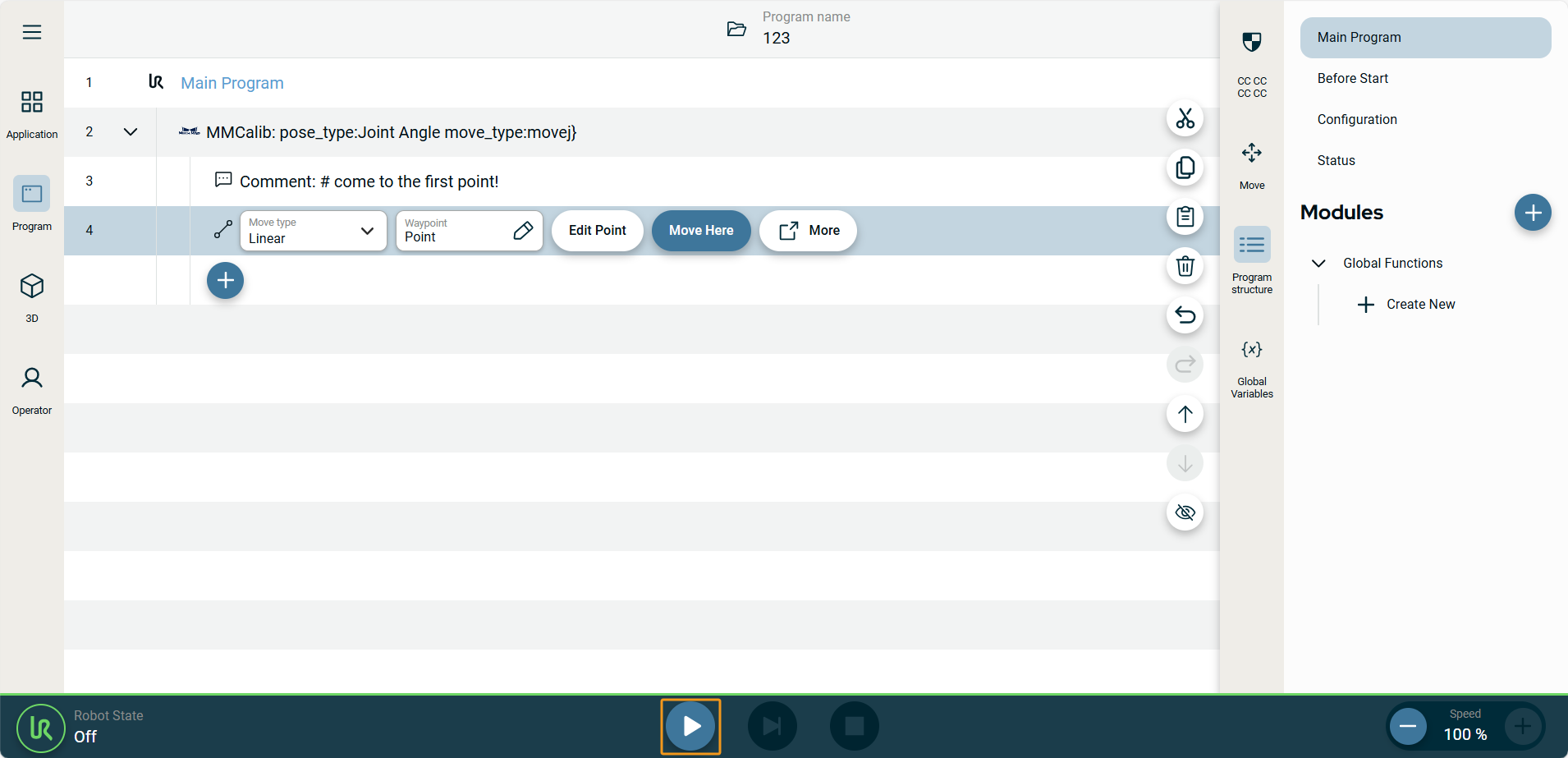
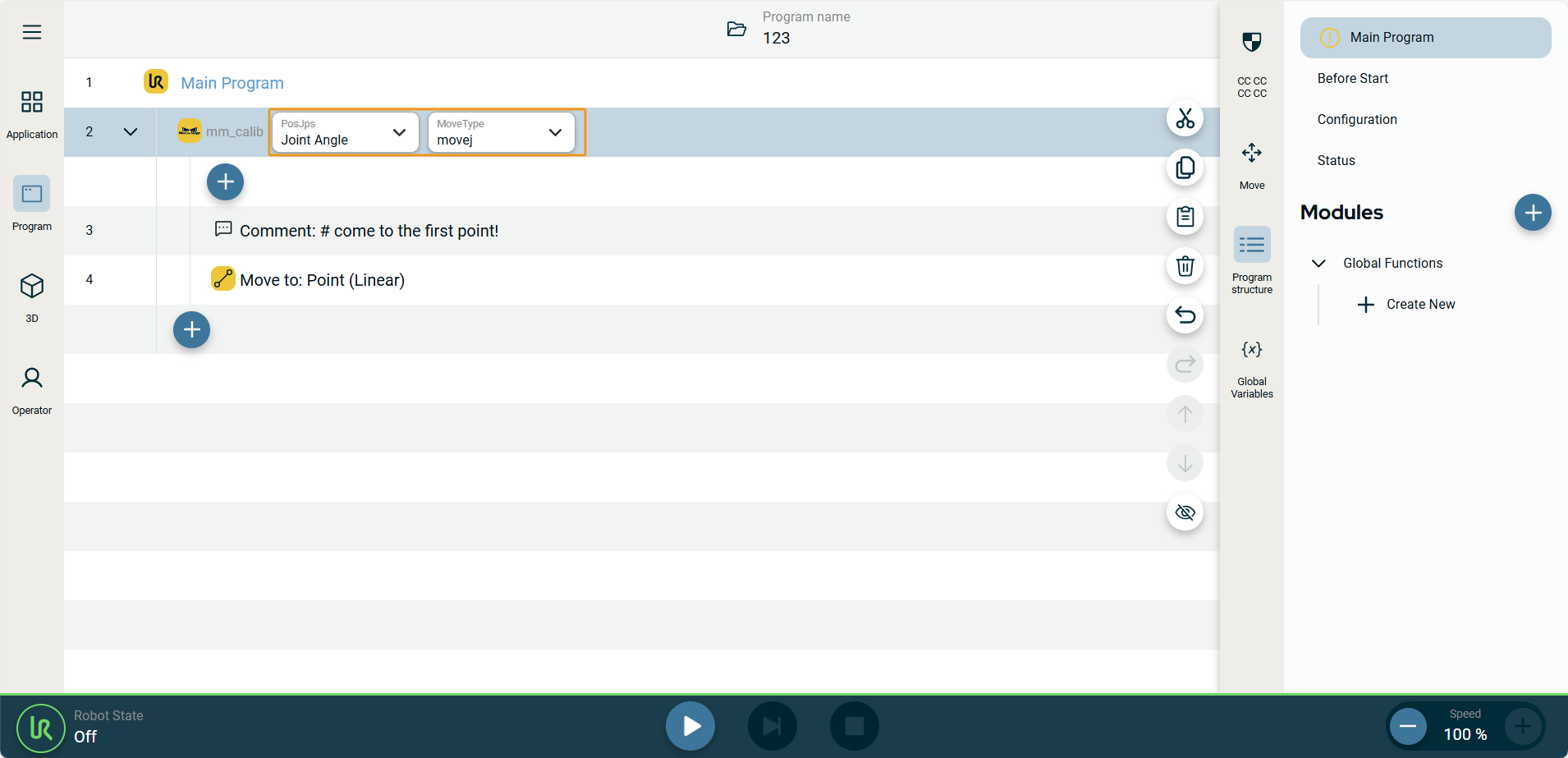
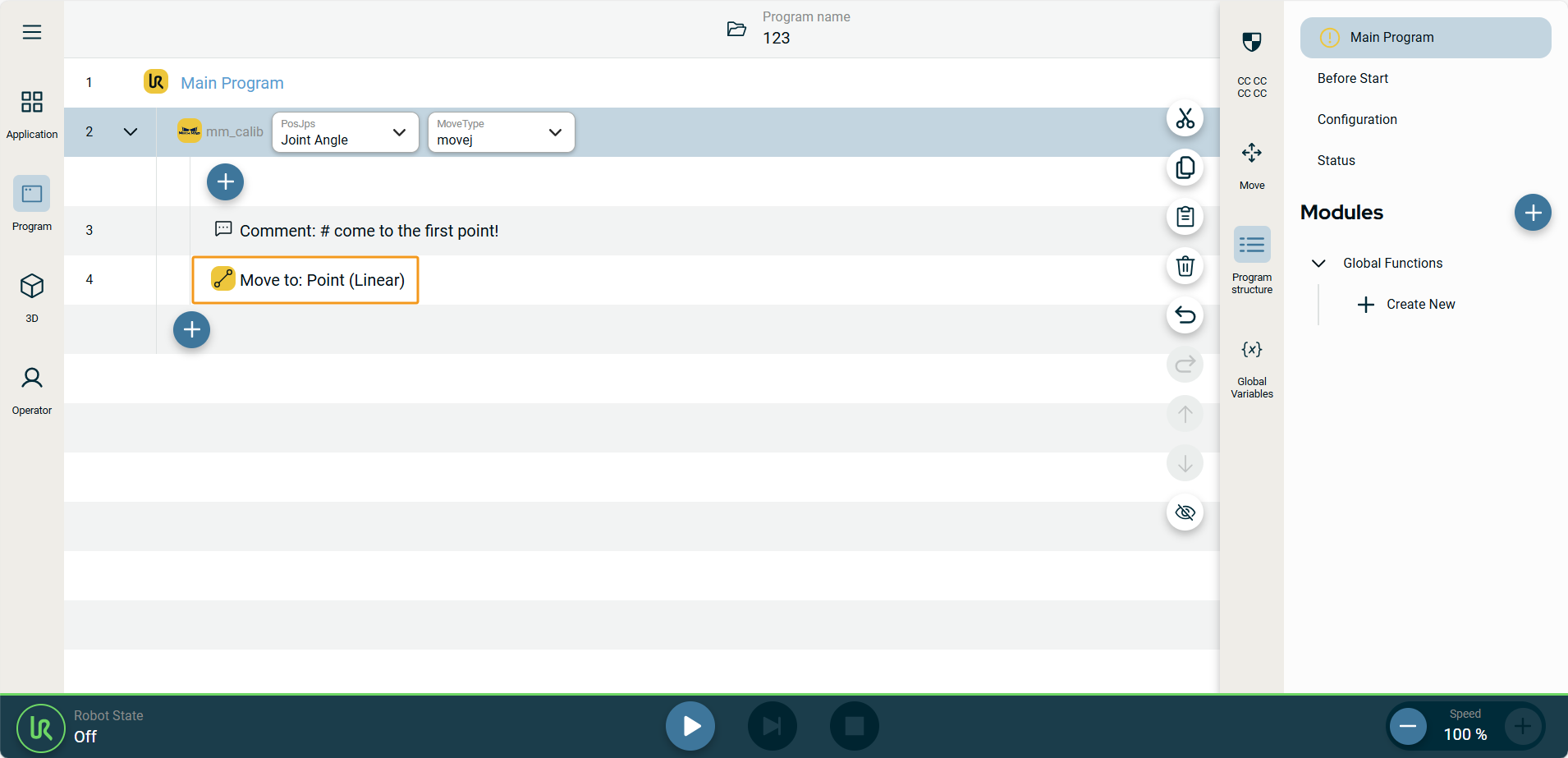
mm_calib 명령에서 PosJps는 Joint Angle(포즈 형식: 관절 각도)로 설정하고,MoveType은 movej(이동 유형: 관절 이동)로 선택합니다.
2. 티치 펜던트를 통해 캘리브레이션 시작점 설정
-
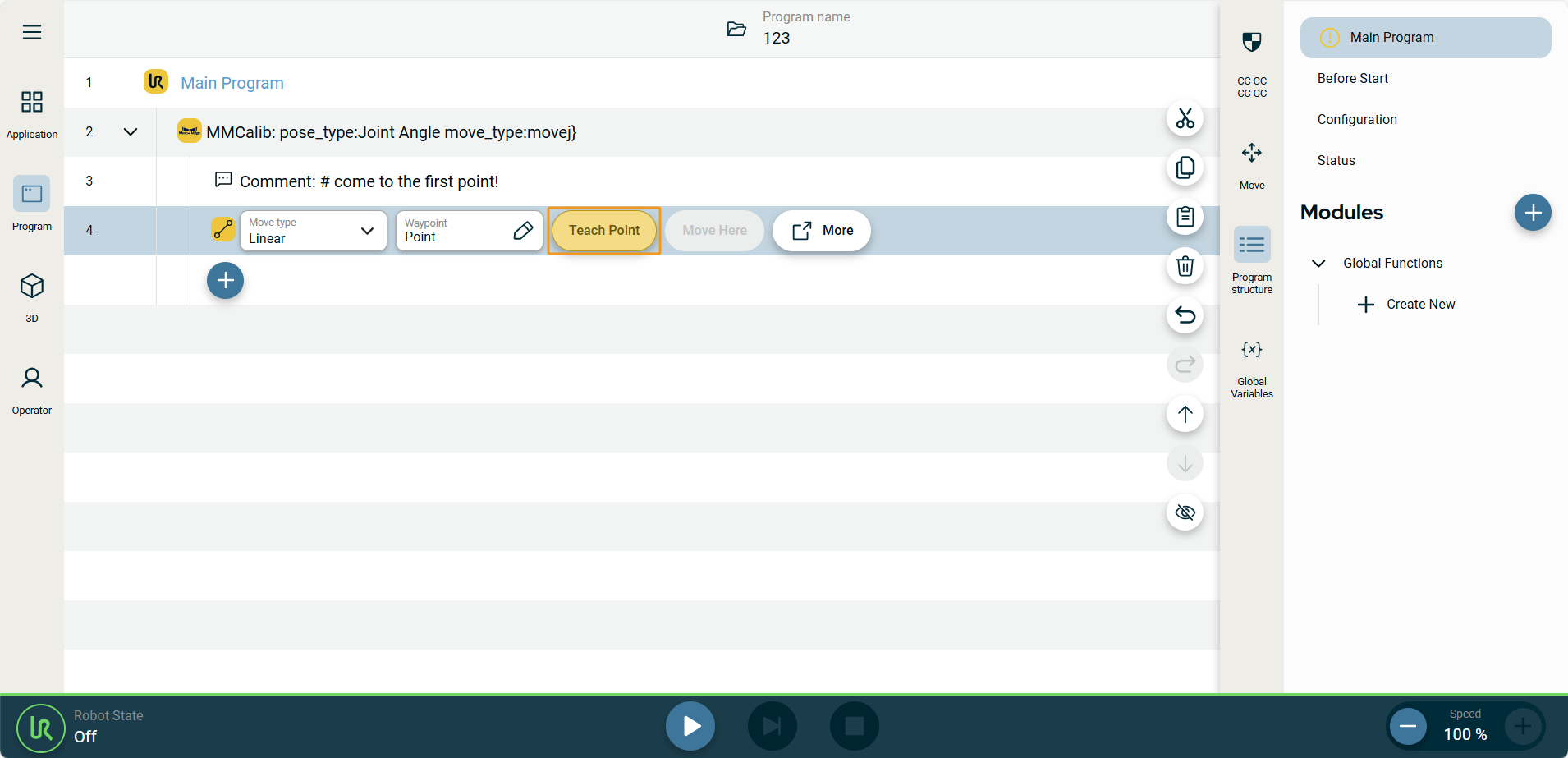
MMCalib 명령어에서 Move to: Point(Linear)클릭합니다.
-
Teach Point버튼을 클릭합니다.
-
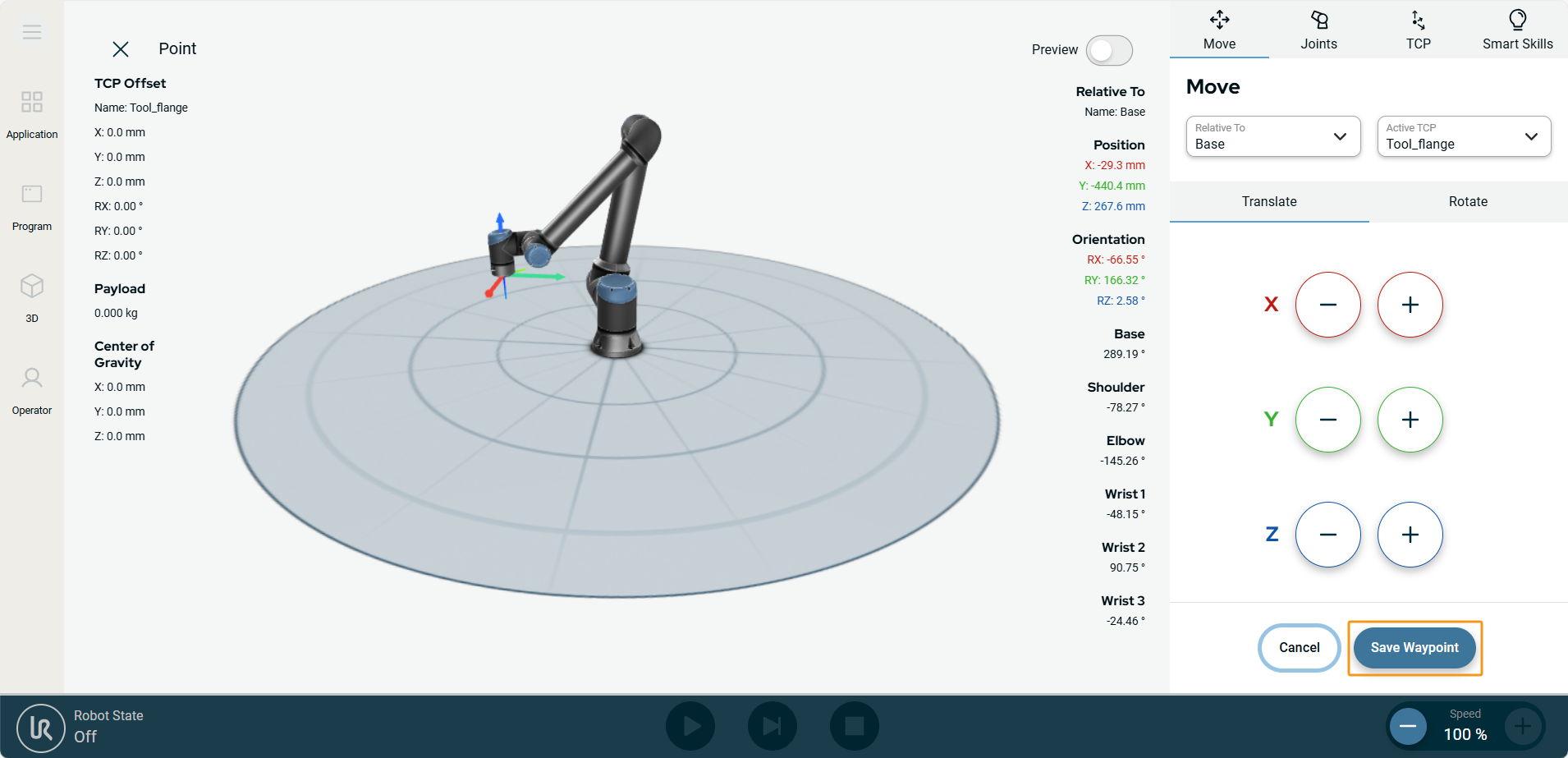
수동으로 로봇을 캘리브레이션의 시작점으로 이동합니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.
-
Save Waypoint 버튼을 클릭합니다.