mm_viz_pick_and_place
이 프로그램은 Mech-Viz프로젝트 실행을 통해 경로 계획 결과 획득하여 피킹 및 배치 작업을 수행합니다.
구성 설명
위치 구성
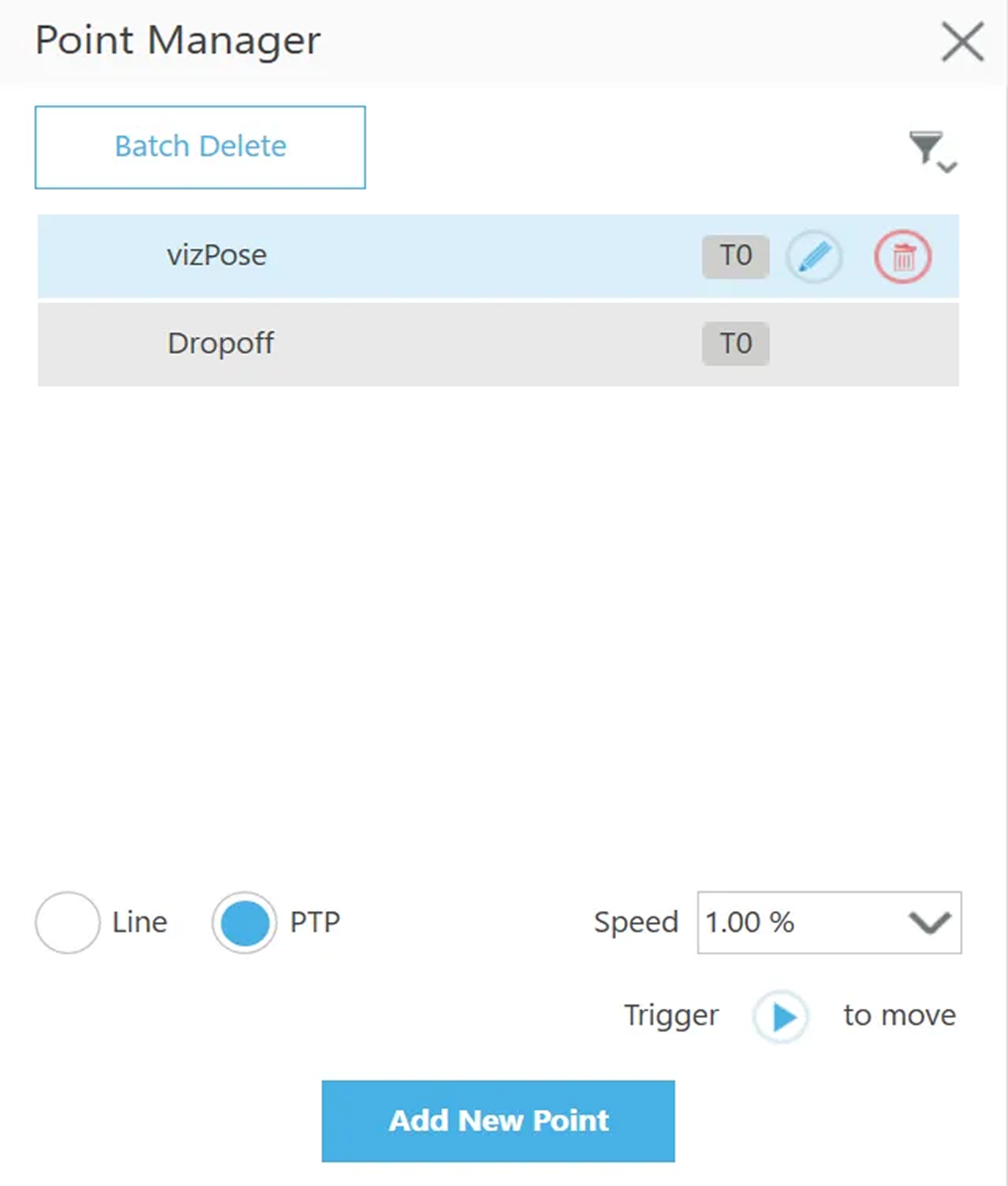
이 프로그램은 다음과 같이 총 2개의 포인트를 포함합니다.
-
vizPose: Mech-Viz 반환된 계획 경로 따라 할당된 위치 포인트입니다. 사용자가 사전에 티칭할 필요가 없습니다.
-
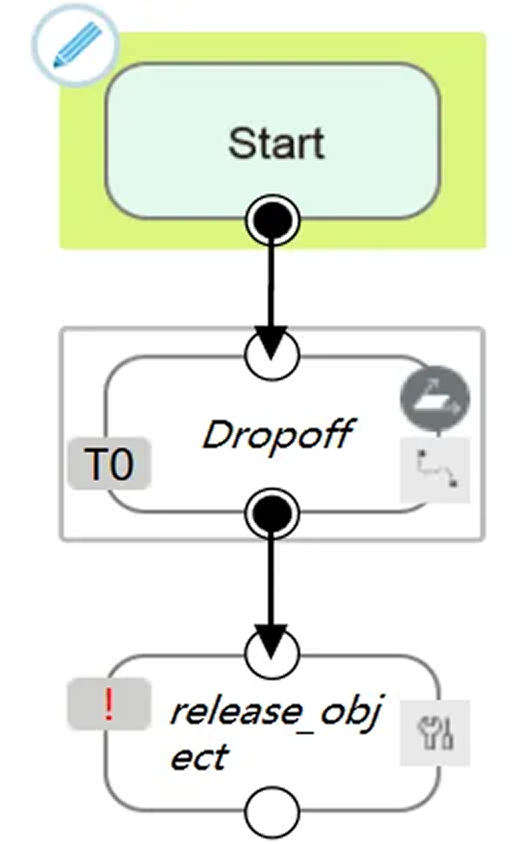
Dropoff: 배치 포인트. 사용자가 사전에 티칭할 필요가 있습니다.
파라미터 설정
MM init 컴포넌트
프로그램의 모든 네트워크 장치는 MM init생성된 네트워크 장치를 동일 사용합니다. 이 컴포넌트를 통해 IPC의 IP주소와 포트 번호를 수정할 수 있습니다.
Run Viz 컴포넌트
사용자는 수동으로 Run Viz컴포넌트의 파라미터 값을 설정 필요합니다.자세한 방법은 컴포넌트 파라미터 값 수정하기를 참조하십시오.
프로그램 설명
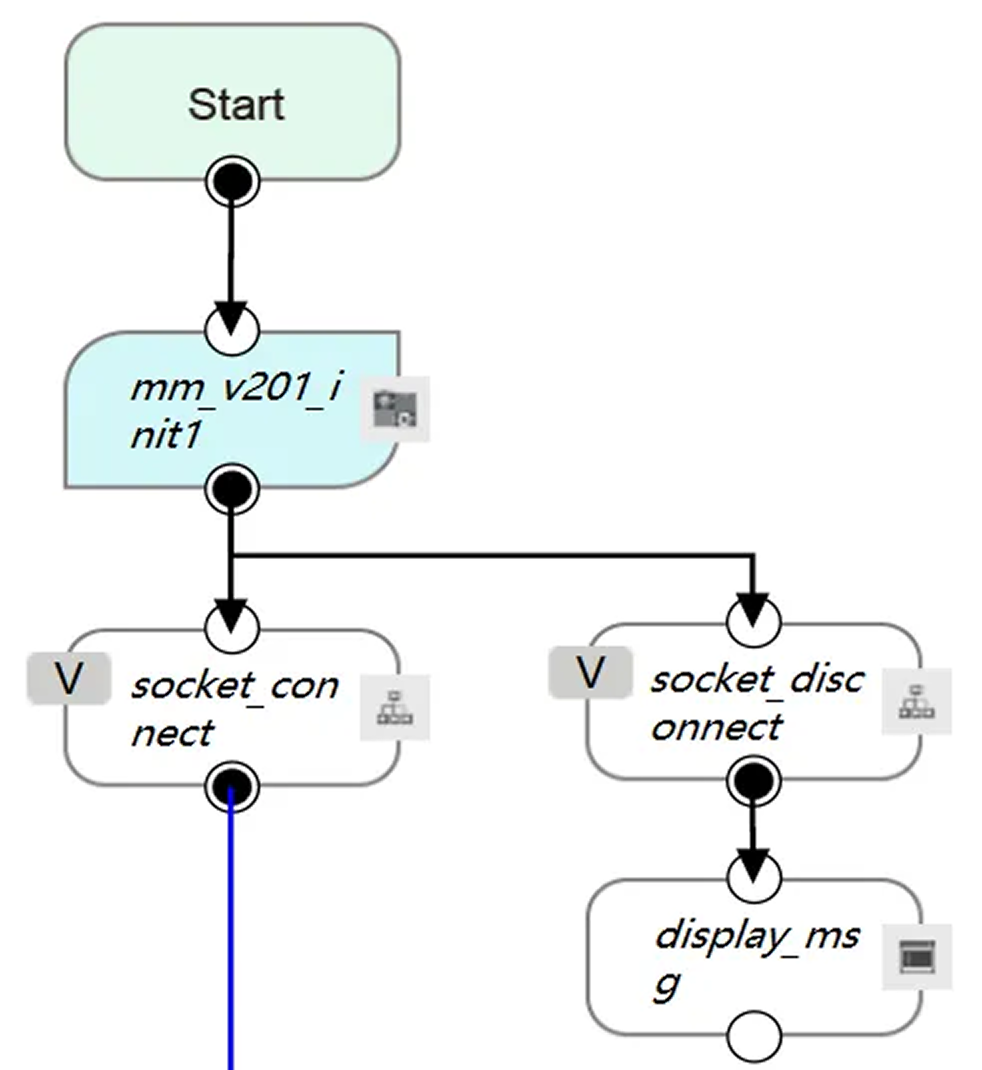
메인 프로그램(mm_v201_viz_pick_and_place)
-
먼저 mm_v201_init1를 통해 로봇과 비전 시스템간에 통신을 설립하십시오. mm_v201_init1에서 IPC의 IP 주소와 포트 번호를 수정할 수 있습니다.
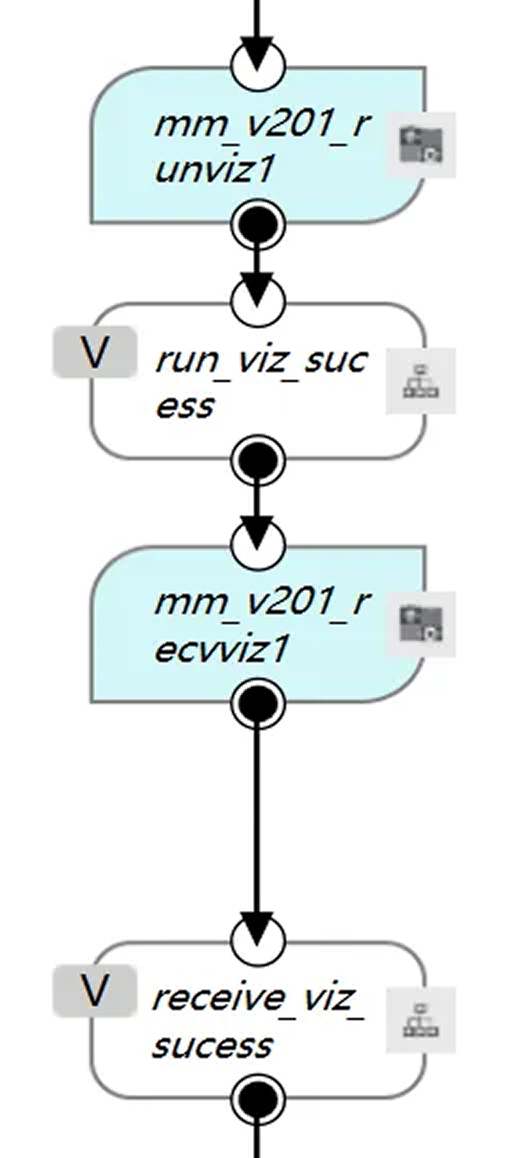
-
mm_v201_runviz1통해 Mech-Viz프로젝트를 실행하고 동시에 mm_v201_runvis1에서 메시지 분기의아웃 포트값과 현재 인덱스 값을 설정할 수 있습니다.
-
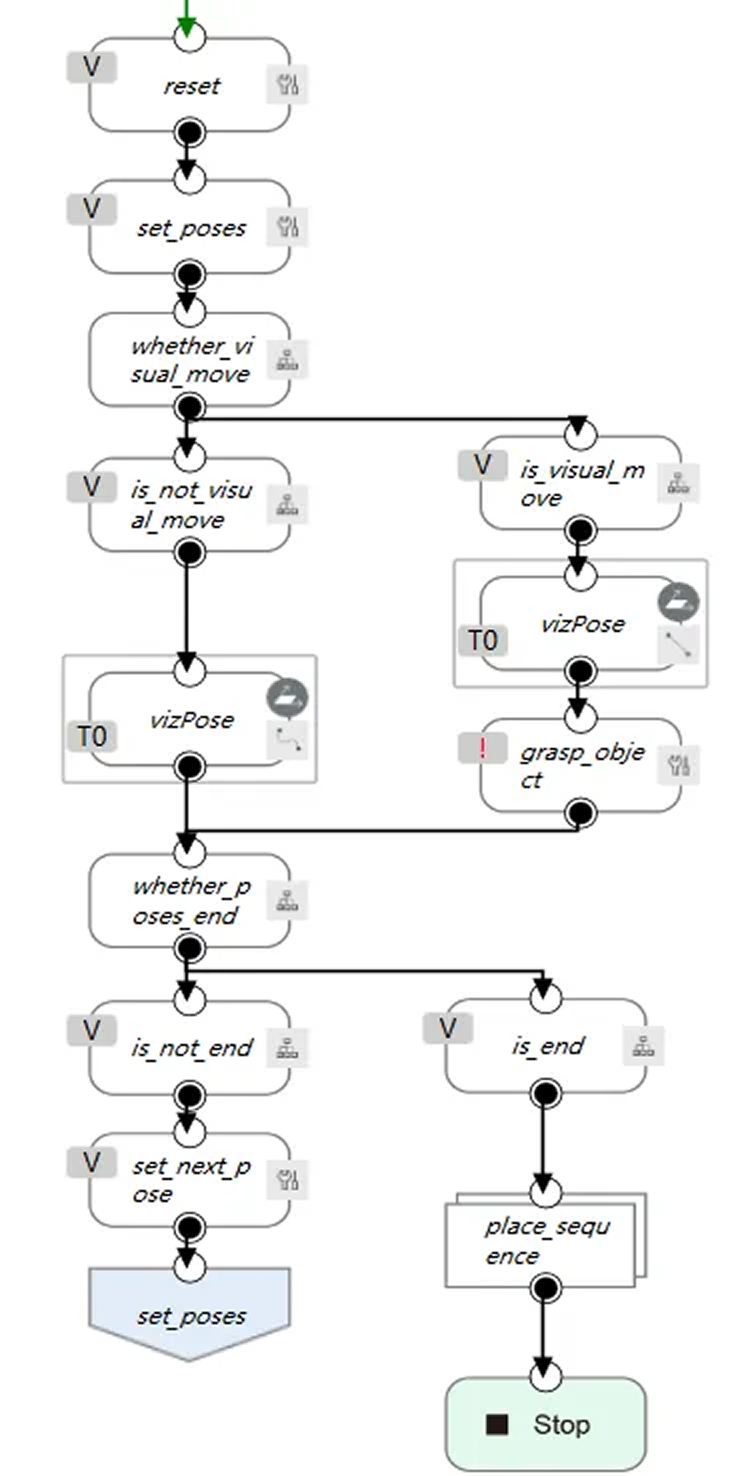
mm_v201_recvviz1통해 Mech-Viz프로젝트 계획된 이동 경로를 획드합니다. 이때 Mech-Viz에서 획득한 계획 경로는 문자열 배열(string[]) 형태로 g_mm_socket_recv_array라는 전역 변수에 저장됩니다.
-
g_mm_socket_recv_array의 웨이포인트 포즈를 vizPose에 할당하고 비전 이동 웨이포인트인지 여부를 판단합니다("비전 이동" 스텝에 해당하는 웨이포인트를 픽 포인트로 사용함). 비전 이동 웨이포인트 아닌 경우 관절 형식으로 웨이포인트까지 이동하고; 비전 이동 웨이포인트인 경우 직선 형식으로 웨이포인트까지 이동한 다음 대상 물체를 피킹합니다. 마찬가지로 grasp_object 여전히 불완전하며 사용자는 말단 장치의 피킹 동작을 제어하기 위해 여기에서 파라미터 값을 수정할 수 있습니다.
-
계획된 웨이포인트가 모두 도달했는지 여부를 판단하고 도달하면 대상 물체를 배치하는 하위 프로세스에 들어갑니다.