통신 구성 및 샘플 프로그램 사용
미쓰비시 iQ-R 시리즈 PLC (외부 모듈 RJ71EIP91 포함)와 Mech-Mind 비전 시스템 간의 EtherNet/IP 통신은 다음 두 가지 방법으로 구현할 수 있습니다.
-
하드웨어 PCI-e 통신 보드를 사용합니다.
-
통신 보드를 사용할 필요 없이 소프트웨어로 통신을 구현합니다.
|
하드웨어 및 소프트웨어 요구 사항
|
본 문서에 나열된 버전 및 모델은 적합성을 위해 엄격히 테스트되었습니다. 다른 모델과 버전의 경우, 사용자는 본 문서를 참고하여 작업을 시도할 수 있으며, 문제가 발생하면 Mech-Mind 기술 서포트팀에 문의하십시오. |
하드웨어
소프트웨어로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 하드웨어 및 하드웨어 연결도를 확인하십시오.
-
PLC:
-
미쓰비시 iQ-R 시리즈 PLC (외부 모듈 RJ71EIP91 포함), 이 샘플은 미쓰비시 RCPU R00 모델 PLC를 사용합니다.
-
미쓰비시 전원 모듈 R61P, 메인 보드 R33B.
-
-
IPC.
-
USB Type-A → USB Mini-B 데이터 케이블.(PLC 프로그램을 다운로드에 사용됨)
-
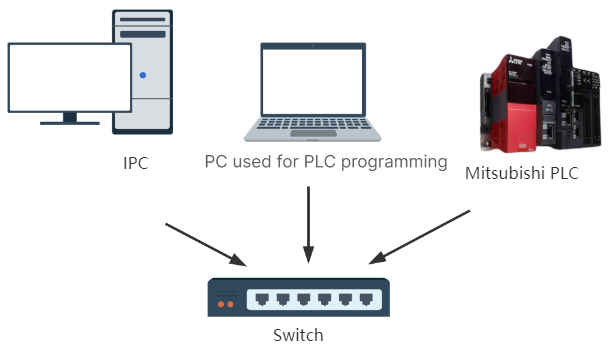
교환기와 네트워크 케이블이 필요합니다.
하드웨어 연결 관계는 아래 그림과 같습니다. 각 장비의 IP 주소는 서로 달라야 하며, 동일한 네트워크 세그먼트에 속하고 다른 장비에서 사용되지 않아야 합니다. PLC의 IP 주소 설정은 아래 내용을 참고하고 IPC와 GX Works3 소프트웨어가 설치된 컴퓨터의 IP 주소 설정은 이 링크의 내용을 참고하십시오.
하드웨어 PCI-e 통신 보드로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 하드웨어 및 하드웨어 연결도를 확인하십시오.
-
PLC:
-
미쓰비시 iQ-R 시리즈 PLC (외부 모듈 RJ71EIP91 포함), 이 샘플은 미쓰비시 RCPU R00 모델 PLC를 사용합니다.
-
미쓰비시 전원 모듈 R61P, 메인 보드 R33B.
-
-
IPC: 표준 PCI-e 통신 보드 HMS IXXAT INpact 40이 설치되었습니다.
-
USB Type-A → USB Mini-B 데이터 케이블.(PLC 프로그램을 다운로드에 사용됨)
-
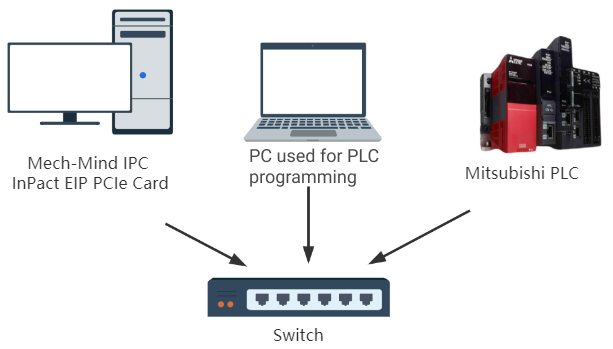
교환기와 네트워크 케이블이 필요합니다.
하드웨어 연결 관계는 아래 그림과 같습니다. 각 장비의 IP 주소는 서로 달라야 하며, 동일한 네트워크 세그먼트에 속하고 다른 장비에서 사용되지 않아야 합니다. PLC와 통신 보드의 IP 주소 설정은 아래 내용을 참고하고 IPC와 GX Works3 소프트웨어가 설치된 컴퓨터의 IP 주소 설정은 이 링크의 내용을 참고하십시오.
소프트웨어
소프트웨어로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 소프트웨어를 확인하십시오.
| 소프트웨어 | 설명 | 설치 위치 |
|---|---|---|
GX Works3 1.081K |
미쓰비시 PLC 프로그래밍 소프트웨어 |
미쓰비시 PLC 프로그래밍용 컴퓨터 |
EtherNet/IP 구성 소프트웨어 |
미쓰비시 PLC 프로그래밍용 컴퓨터 |
|
Mech-Vision 및 Mech-Viz소프트웨어 버전은 2.0.0 이상 |
Mech-Mind소프트웨어 시스템 |
IPC |
위의 소프트웨어 외에 후속 사용하도록 다음 파일을 IPC에서 GX Works3이 설치된 컴퓨터에 복사하세요.
-
Software EIP.eds 파일: EtherNet/IP 네트워크에서 IPC의 식별 정보를 제공하는 데 사용됩니다.
Software EIP.eds 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의
통신 구성 요소/Robot_Interface/EthernetIP/EDS폴더에 있습니다. -
PLC 샘플 파일 iQ-R_RJ71EIP91.usl, 이 파일은 다음 사용자 라이브러리가 포함됩니다.
-
M_RJ71EIP91_Class1SetOutputData_00A: Class1을 통해 통신하여 지정된 연결의 입력 데이터를 획득합니다.
-
M_RJ71EIP91_Class1GetInputData_00A: Class1을 통해 통신하여 지정된 연결의 출력 데이터를 획득합니다.
-
CameraSignalsMove: 비전 시스템 신호를 전송합니다.
-
CameraTest: 비전 시스템을 테스트합니다.
-
MM_XXX_XXX 기능 블록: 각 인터페이스 명령어 기능을 구현하는 데 사용됩니다.
샘플 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의 통신 구성 요소/Robot_Interface/EthernetIP/Programming Samples/MITSUBISHI iQ-R PLC EthernetIP폴더에 있습니다. -
하드웨어 PCI-e 통신 보드로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 필요한 소프트웨어를 확인하십시오.
| 소프트웨어 | 설명 | 설치 위치 |
|---|---|---|
GX Works3 1.081K |
미쓰비시 PLC 프로그래밍 소프트웨어 |
미쓰비시 PLC 프로그래밍용 컴퓨터 |
EtherNet/IP 구성 소프트웨어 |
미쓰비시 PLC 프로그래밍용 컴퓨터 |
|
PCIe 보드 및 드라이버 소프트웨어 |
IPC |
|
Mech-Vision 및 Mech-Viz소프트웨어 버전은 2.0.0 이상 |
Mech-Mind소프트웨어 시스템 |
IPC |
통신 보드의 IP 주소를 설정하는 데 사용됨 |
IPC |
위의 소프트웨어 외에 후속 사용하도록 다음 파일을 IPC에서 GX Works3이 설치된 컴퓨터에 복사하세요.
-
005A002B003A0100.EDS 파일: EtherNet/IP 네트워크에서 IPC의 식별 정보를 제공하는 데 사용됩니다.
005A002B003A0100.EDS 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의
통신 구성 요소/Robot_Interface/EthernetIP/EDS폴더에 있습니다. -
PLC 샘플 파일 iQ-R_RJ71EIP91.usl, 이 파일은 다음 사용자 라이브러리가 포함됩니다.
-
M_RJ71EIP91_Class1SetOutputData_00A: Class1을 통해 통신하여 지정된 연결의 입력 데이터를 획득합니다.
-
M_RJ71EIP91_Class1GetInputData_00A: Class1을 통해 통신하여 지정된 연결의 출력 데이터를 획득합니다.
-
CameraSignalsMove: 비전 시스템 신호를 전송합니다.
-
CameraTest: 비전 시스템을 테스트합니다.
-
MM_XXX_XXX 기능 블록: 각 인터페이스 명령어 기능을 구현하는 데 사용됩니다.
샘플 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의 통신 구성 요소/Robot_Interface/EthernetIP/Programming Samples/MITSUBISHI iQ-R PLC EthernetIP폴더에 있습니다. -
통신 구성
소프트웨어로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 디테일 작업을 확인하십시오.
-
Mech-Vision 소프트웨어를 시작합니다. 표시되는 인터페이스에 따라 다음의 적절한 방법을 선택하여 솔루션을 생성하십시오.
-
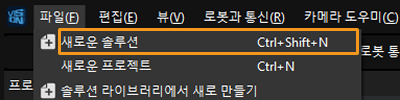
시작 화면이 나타나면 새로운 솔루션 만들기를 클릭하여 새로운 솔루션을 만듭니다.

-
메인 인터페이스가 나타나면 메뉴 바에서 을 차례로 클릭하여 새로운 솔루션을 만듭니다.
-
로봇 선택 드롭다운 메뉴를 클릭하여 실제 사용 중인 로봇에 따라 다음 설명을 참조하고 목록에 있는 로봇 또는 *사용자 지정 로봇*을 선택합니다. 마지막으로 다음을 클릭합니다.
-
목록에 있는 로봇: 대부분의 로봇에 적합합니다. 로봇 모델 선택을 클릭하여 구체적인 모델을 선택할 수 있습니다.
-
사용자 지정 로봇: 갠트리 로봇 또는 위 브랜드 이외의 로봇에 적용 가능합니다. 후속은 로봇 오일러 각 유형 및 *로봇 좌표계*를 선택해야 합니다.
-
-
-
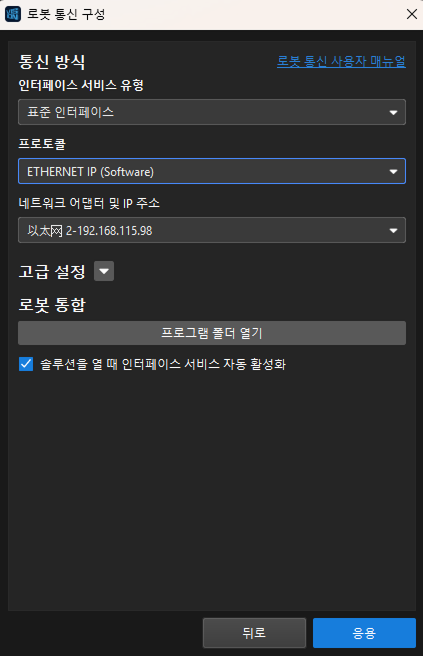
로봇 통신 구성 창에서 다음 구성을 수행합니다.
-
로봇 선택 드롭다운 디렉터리를 클릭하고 목록에 있는 로봇을 선택한 다음 로봇 모델 선택을 클릭하여 로봇 모델을 선택합니다. 그 다음에 다음을 클릭합니다.
-
통신 방식 아래의 인터페이스 서비스를 표준 인터페이스로, 프로토콜을 ETHERNET IP (Software)로 선택합니다. 네트워크 어댑터 및 IP 주소를 EtherNet/IP 통신에 사용할 로컬 PC의 네트워크 어댑터와 IP 주소를 선택합니다.
-
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화를 선택합니다.
-
응용을 클릭합니다.
-
-
Mech-Vision 메인 화면에서 툴 바에 있는 “인터페이스 서비스” 기능이 활성화되어 있는지 확인하십시오.
하드웨어 PCI-e 통신 보드로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 디테일 작업을 확인하십시오.
IPC 통신 보드 및 드라이브 확인
-
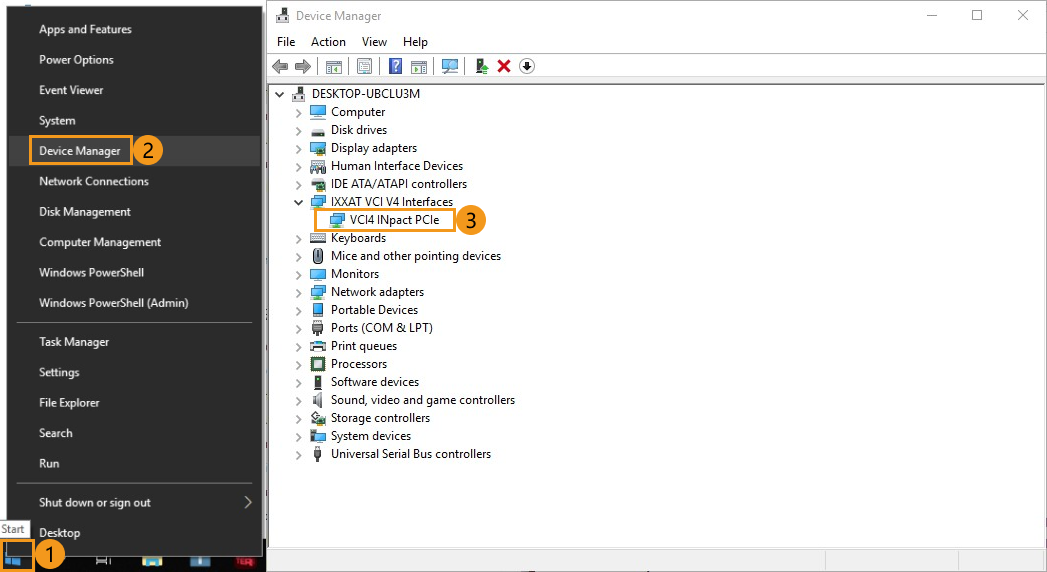
아래와 같이 INpact EIP 슬레이브 PCIe 보드가 IPC의 PCI-e 슬롯에 제대로 장착되었는지 확인하십시오.

-
IPC에서 Windows 아이콘을 마우스 오른쪽 버튼으로 클릭하고 장치 관리자를 열고 보드 드라이브 소프트웨어 VCI4 INpact PCIe가 설치되었는지 확인하세요.
"로봇 통신 구성" 설정
-
Mech-Vision 소프트웨어를 시작합니다. 표시되는 인터페이스에 따라 다음의 적절한 방법을 선택하여 솔루션을 생성하십시오.
-
시작 화면이 나타나면 새로운 솔루션 만들기를 클릭하여 새로운 솔루션을 만듭니다.
-
메인 인터페이스가 나타나면 메뉴 바에서 을 차례로 클릭하여 새로운 솔루션을 만듭니다.
-
-
Mech-Vision 툴 바에서 로봇 통신 구성을 클릭합니다.
-
로봇 통신 구성 창에서 다음 구성을 수행합니다.
-
로봇 선택 드롭다운 메뉴를 클릭하여 실제 사용 중인 로봇에 따라 다음 설명을 참조하고 목록에 있는 로봇 또는 사용자 지정 로봇을 선택합니다. 마지막으로 다음을 클릭합니다.
-
목록에 있는 로봇: 대부분의 로봇에 적합합니다. 로봇 모델 선택을 클릭하여 구체적인 모델을 선택할 수 있습니다.
-
사용자 지정 로봇: 갠트리 로봇 또는 위 브랜드 이외의 로봇에 적용 가능합니다. 후속은 로봇 오일러 각 유형 및 로봇 좌표계를 선택해야 합니다.
-
-
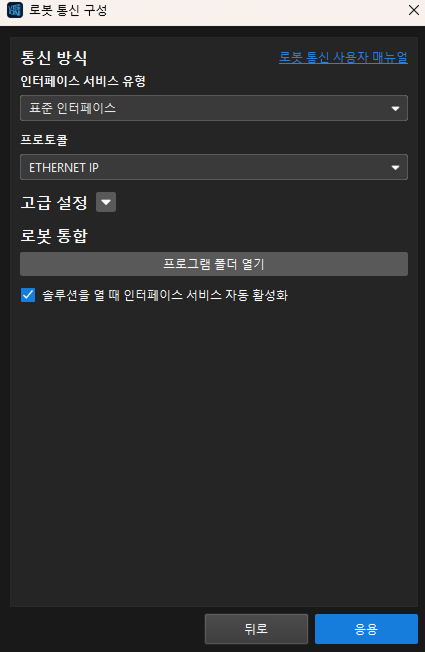
통신 방식에서 인터페이스 서비스 유형을 표준 인터페이스로 선택하고 프로토콜은 ETHERNET IP로 선택합니다.
-
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화를 선택합니다.
-
응용을 클릭합니다.
-
-
Mech-Vision 메인 화면에서 툴 바에 있는 “인터페이스 서비스” 기능이 활성화되어 있는지 확인하십시오.
IPC 통신 보드 IP 주소 설정
| 다음 작업을 시작하기 전에 이전 단계의 인터페이스 서비스가 활성화되어 있는지 확인하세요. |
-
네트워크 케이블을 사용하여 IPC의 네트워크 포트 중 하나를 IXXAT INpact 통신 보드의 네트워크 포트에 연결합니다.
통신 보드를 설정하고 통신을 성공한 후 여기에 사용된 이더넷 케이블을 제거할 수 있습니다. -
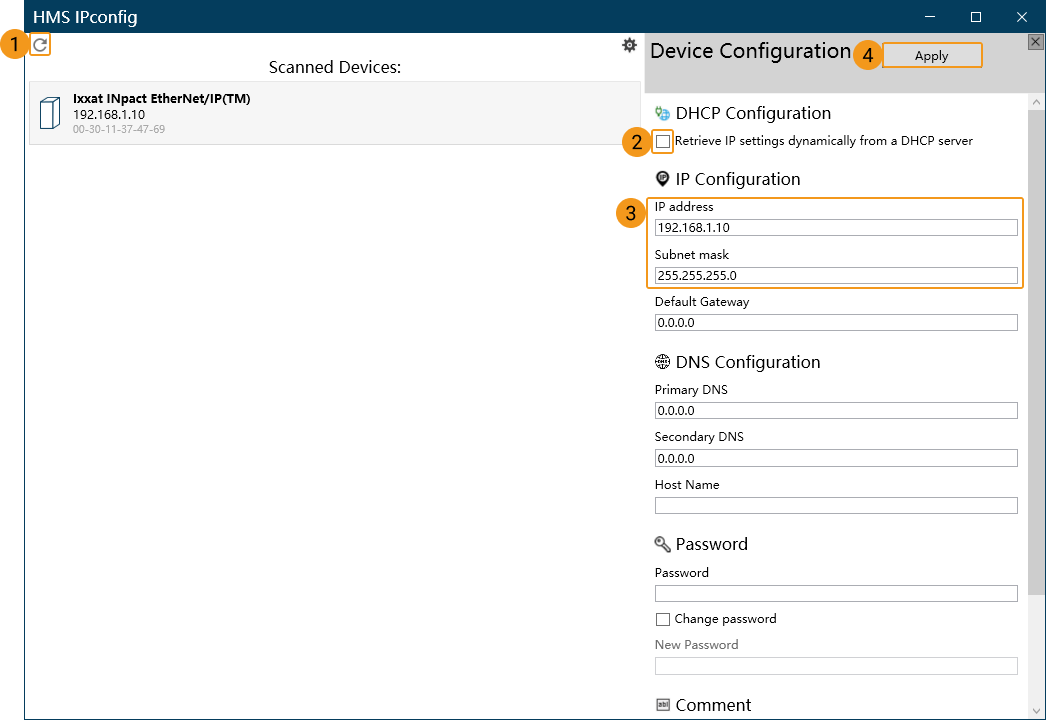
HMS IPconfig 소프트웨어를 열고 스캔을 클릭합니다. "Retrieve IP Settings Dynamically from a DHCP server" 옵션을 언체크하고 보드 IP 주소와 서브넷 마스크를 설정한 후 Apply을 클릭하여 확인합니다.
PLC 프로젝트 만들기 및 구성하기
PLC 프로젝트를 만들기
-
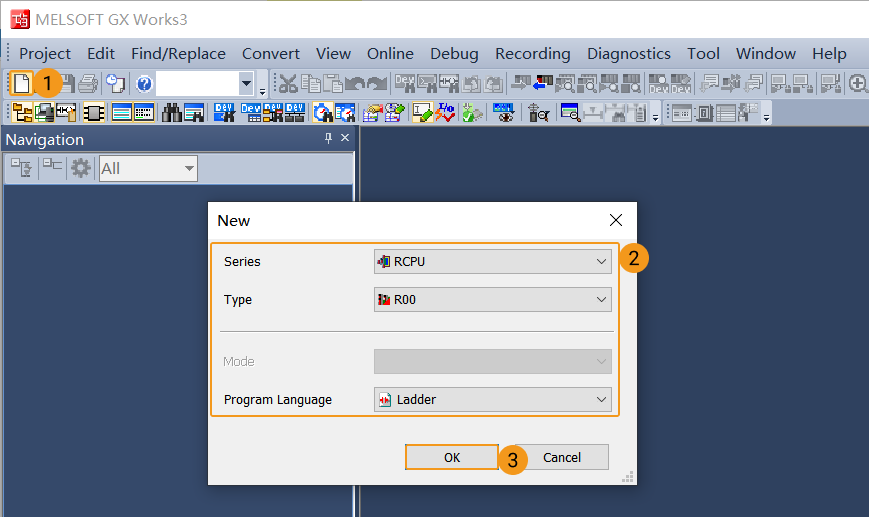
GX Works3 소프트웨어를 열고 툴 바의 새로 만들기 아이콘을 클릭합니다. 새로 만들기 창에서 시리즈를 RCPU 로, 타입을 R00 으로, 프로그램 언어을 Ladder 로 설정하고 OK를 클릭합니다.
-
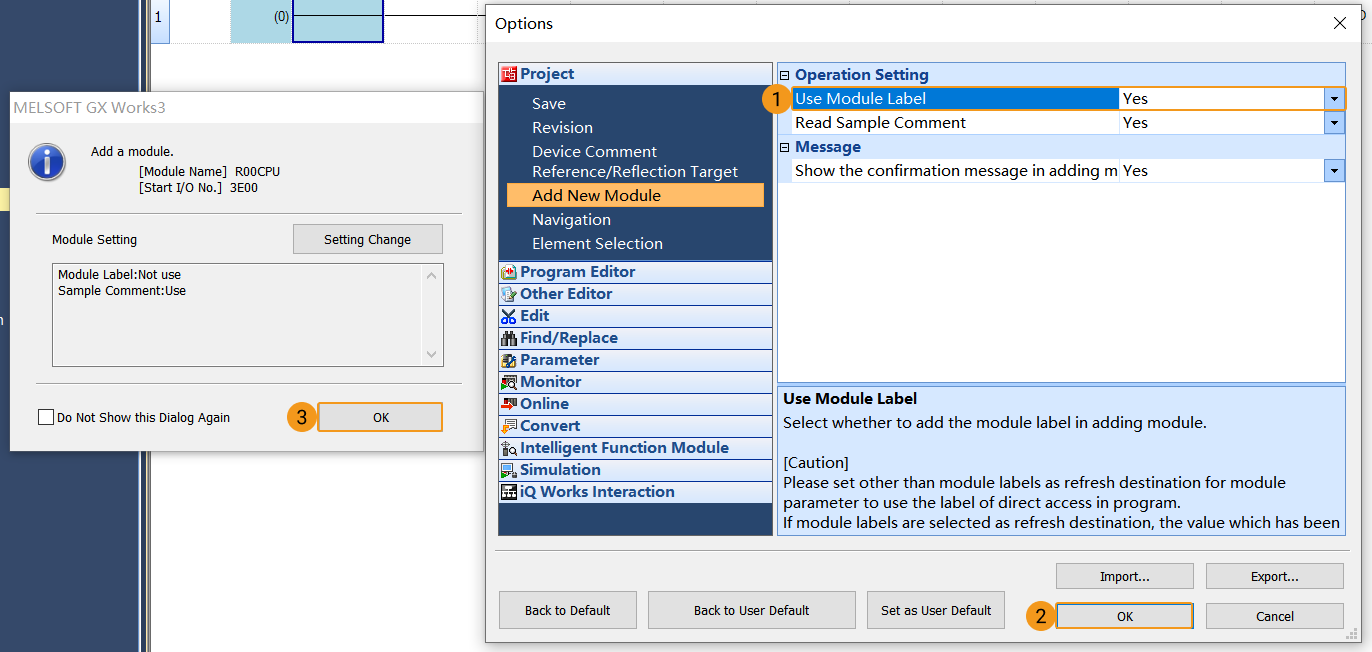
Add a module 창에서 Setting Change를 클릭합니다.
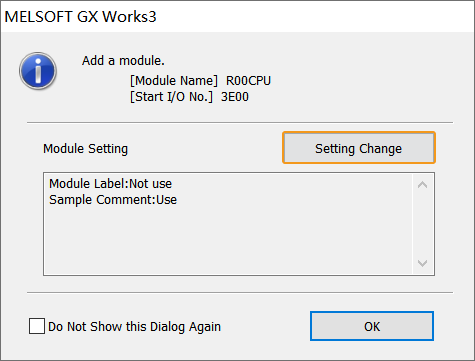
Options 창의 "Use Module Label" 드롭다운 리스트에서 Yes 를 선택하고 OK를 클릭합니다. Add a module 창에 돌아가서 OK를 다시 클릭합니다.
-
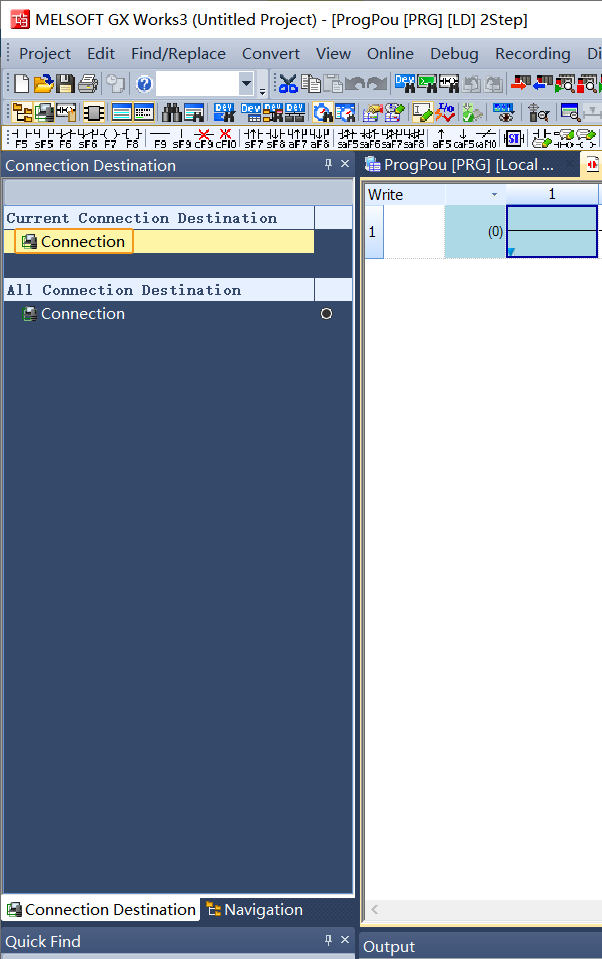
왼쪽 Connection Destination 패널의 Current Connection Destination 섹션에서 Connection 을 두 번 클릭합니다.
-
Specify Connection Destination Connection 창이 나타냅니다.
-
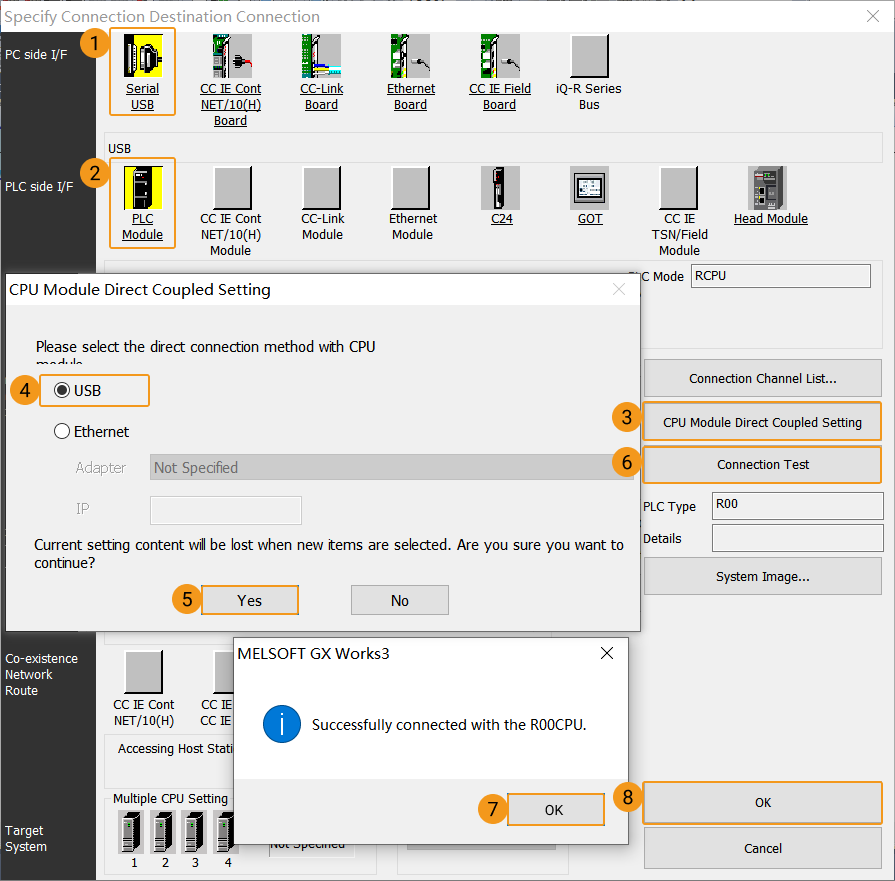
PC 측에서 Serial USB, PLC 측에서 PLC Module 로 선택합니다. PLC Mode는 자동으로 *RCPU*로 채워집니다.
-
CPU Module Direct Coupled Setting을 클릭합니다. 팝업창에서 USB 를 선택하고 Yes를 클릭합니다.
-
Specify Connection Destination Connection 창에 돌아가서 Connection Test를 클릭합니다. Successfully connected with the R00CPU 팝업창이 나타나면 컴퓨터의 GX Works3 소프트웨어가 하드웨어 PLC와 성공적으로 통신하고 있음을 의미합니다.
-
Specify Connection Destination Connection 창의 OK를 클릭하여 GX Works3 소프트웨어 창에 돌아갑니다.
-
-
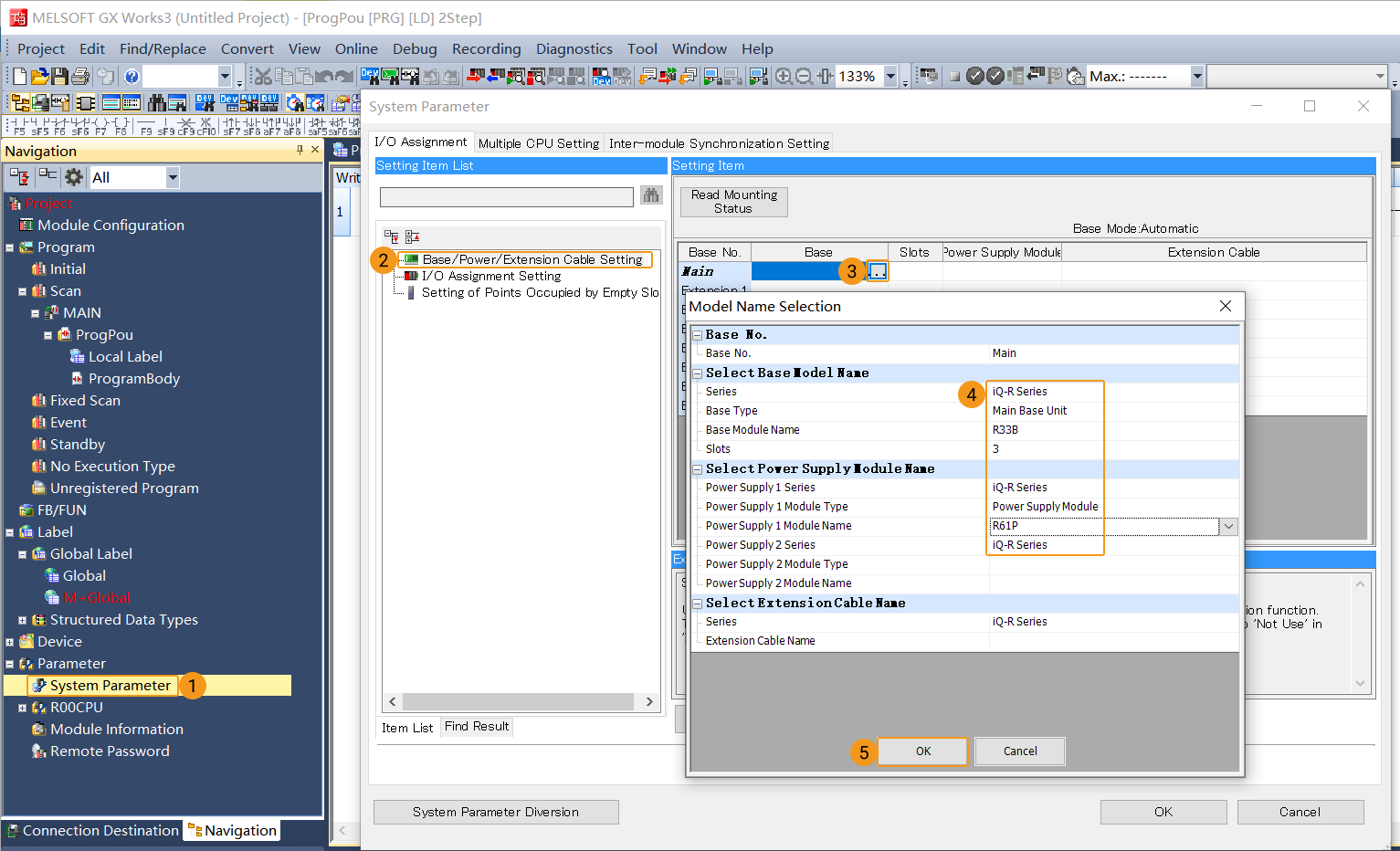
왼쪽 네비게이션 창에서 Parameter 바를 확장하고 System Parameter 를 더블 클릭하면 System Parameter 팝업창이 나타납니다.
-
System Parameter 창의 I/O 할당 탭에서 Base/Power/Extension Cable Setting 을 선택하고 Main 오른쪽에 있는 Base 열의 버튼을 클릭하면 Model Name Selection 창이 팝업됩니다.
-
Model Name Selection 창에서 실제 상황에 맞게 메인 보드 모듈과 전원 모듈을 선택하고 OK를 클릭합니다.
다음과 같은 창이 나타나면 OK를 클릭합니다.
-
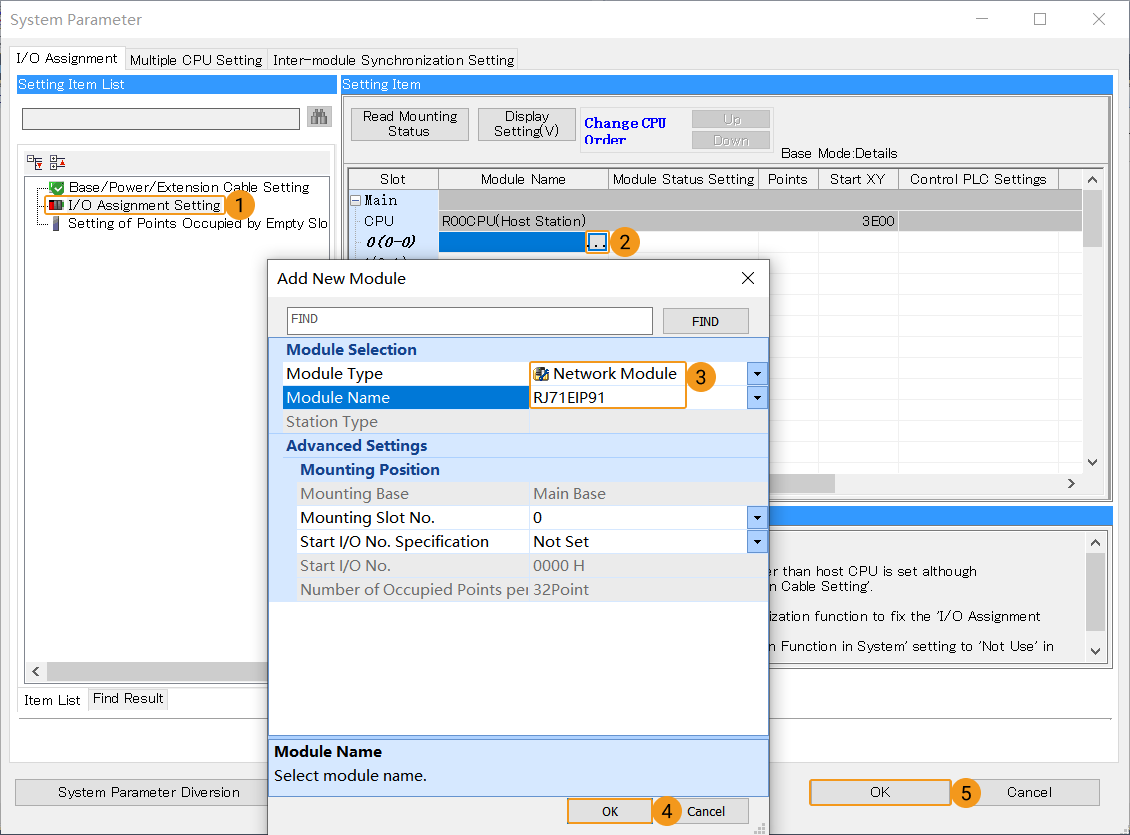
System Parameter 창의 I/O 할당 탭에서 I/O Assignment Setting 을 선택하고 0 (0-0) 오른쪽에 있는 Module Name 열의 버튼을 클릭하면 Add New Module 창이 팝업됩니다.
-
Add New Module 창에서 Module Type을 Network Module 로 선택하고 Module Name를 RJ71EIP91 로 선택한 후 OK 를 클릭합니다.
-
다음과 같은 창이 나타나면 OK를 클릭합니다.
-
-
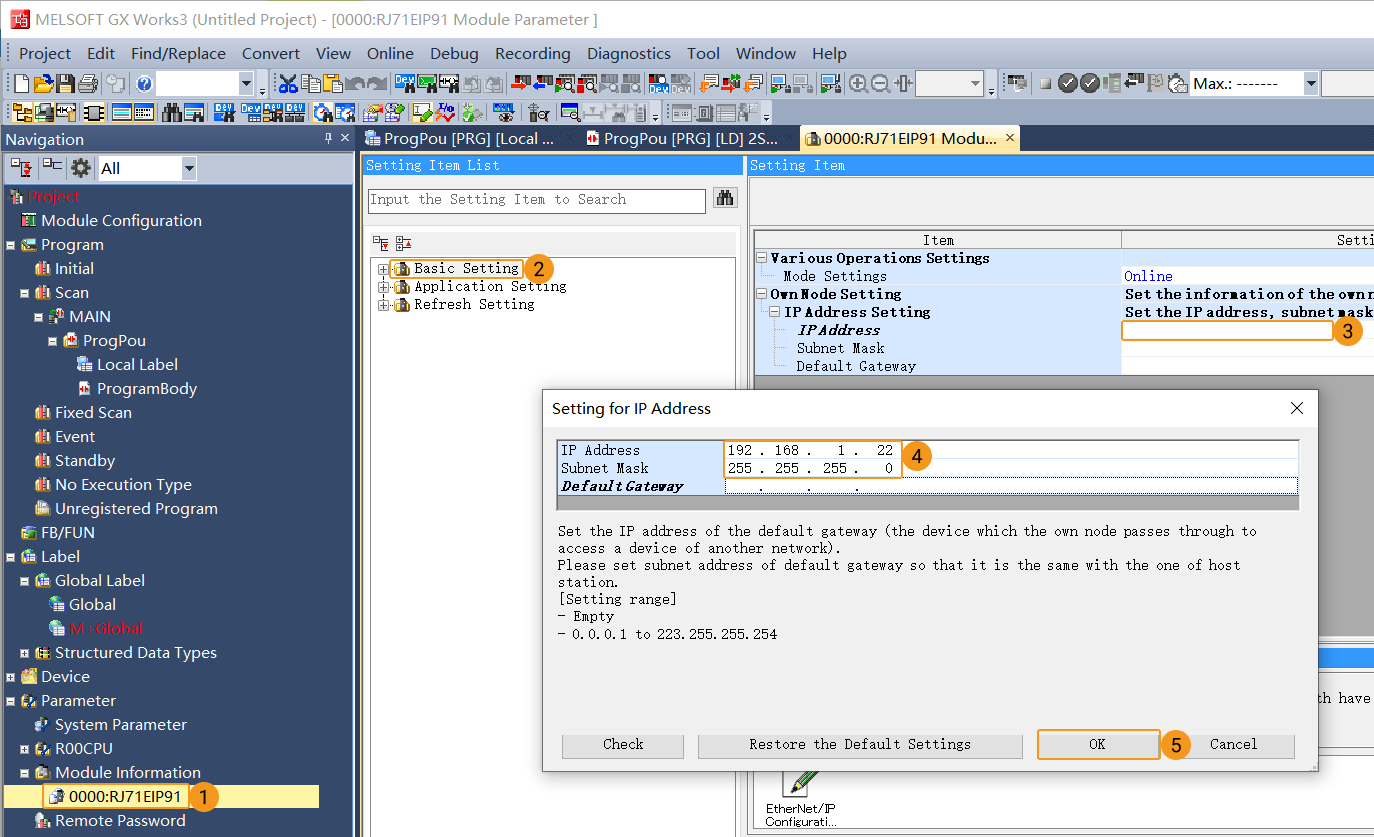
왼쪽 네비게이션 창에서 Parameter 바를 확장하고 새로 추가된 0000:RJ71EIP91 을 더블 클릭하면 Module Parameter 팝업창이 나타납니다.
-
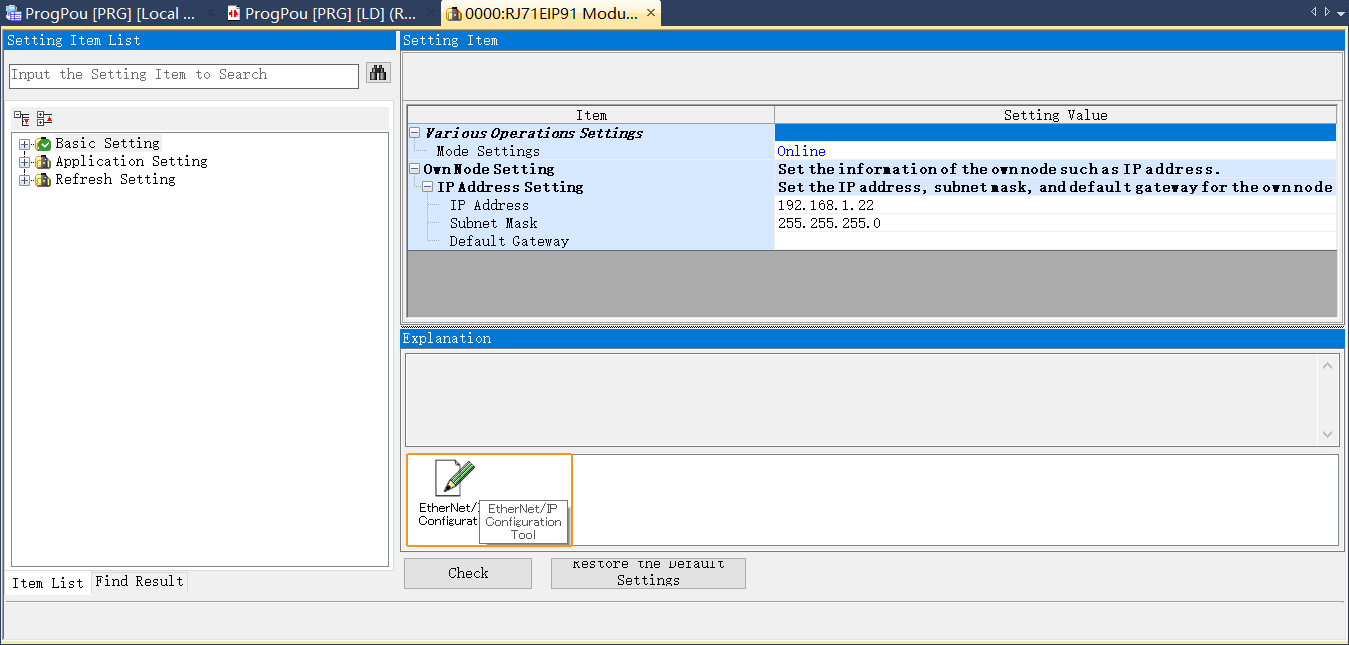
Module Parameter 창에서 Basic Setting 을 선택하고 Own Mode Setting 을 확장한 후 IP 주소 오른쪽에 있는 빈 공간을 더블 클릭합니다.
-
Setting for IP Address 창에서 IP 주소와 서브넷 마스크를 설정한 후 OK를 클릭합니다.
-
하드웨어 구성을 PLC에 다운로드
-
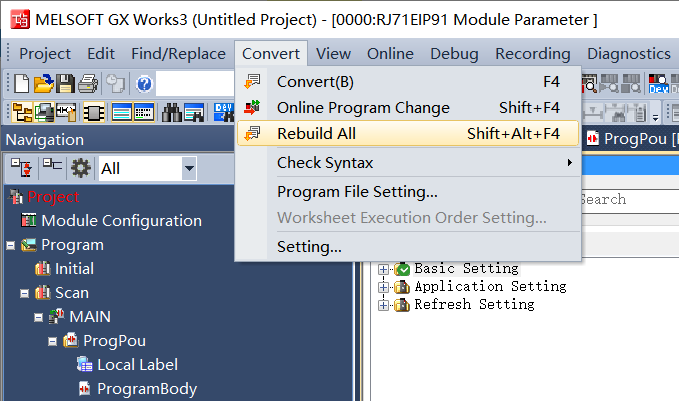
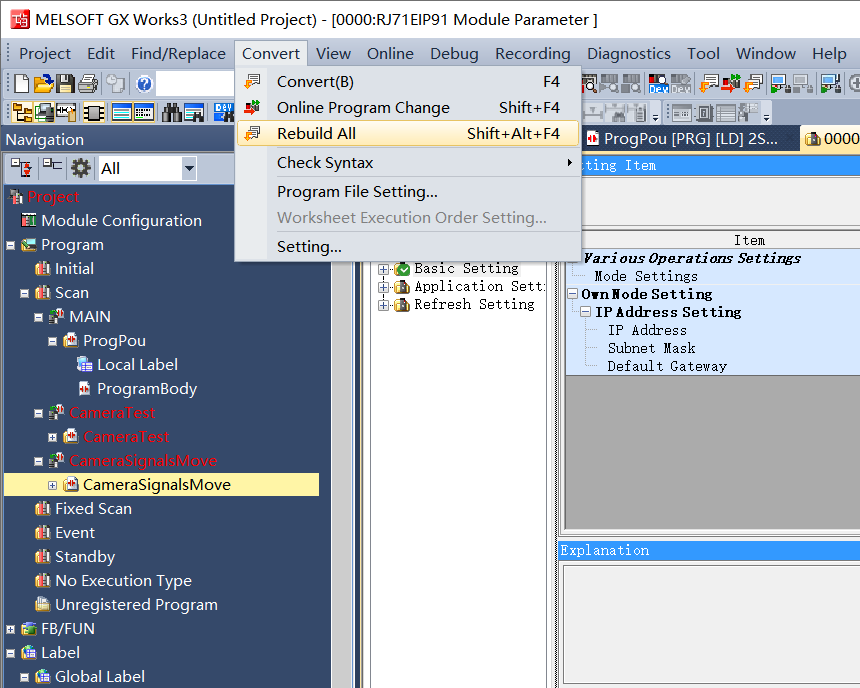
왼쪽 네비게이션 창에서 Program 을 선택하고 메뉴 바의 를 클릭합니다.
-
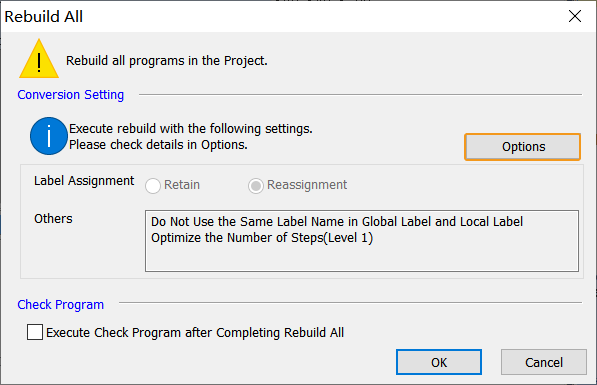
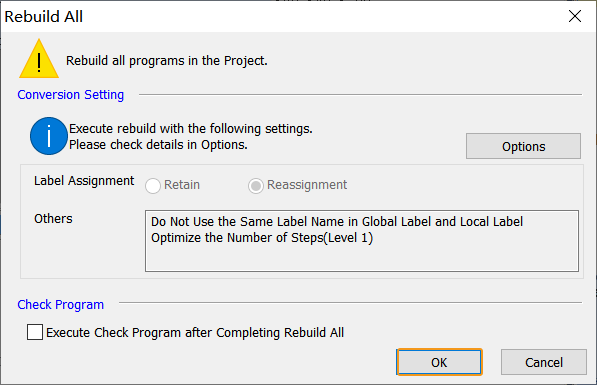
Rebuild All 창에서 Options를 클릭하면 Options 창이 나타납니다.
-
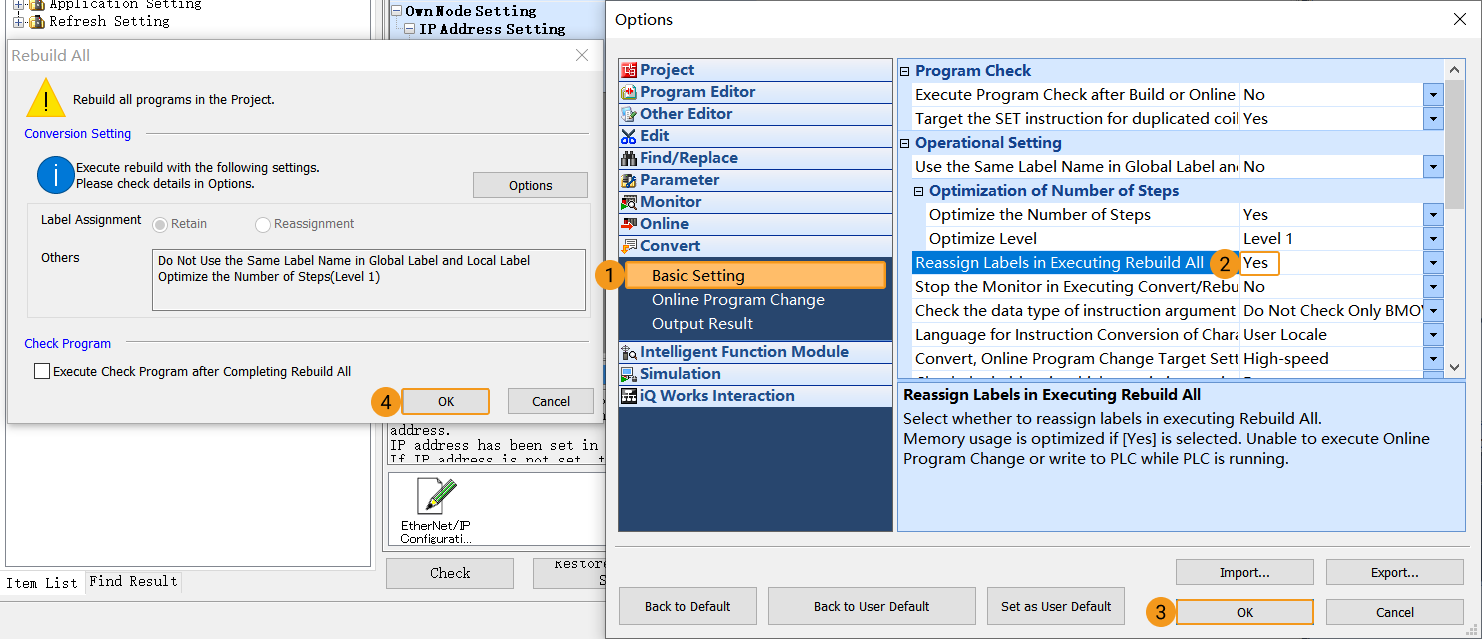
Options 창에서 왼쪽에 있는 Basic Setting 을 클릭합니다. "Reassign Labels in Executing Rebuild All"에 대해 "Yes "를 선택하고 OK를 클릭합니다.
-
Rebuild All 창에 돌아가서 OK를 클릭합니다.
-
-
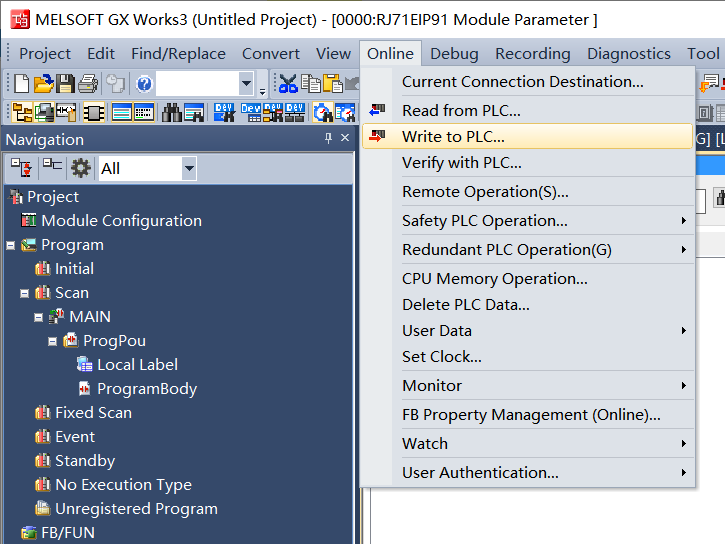
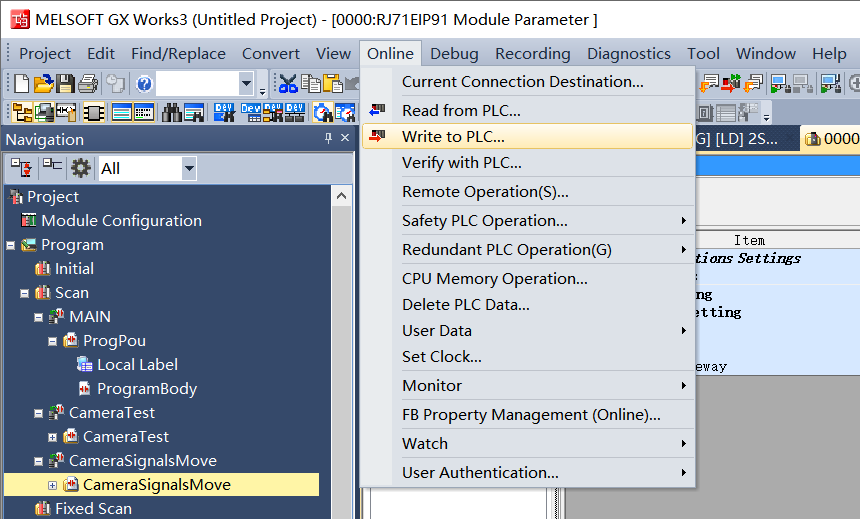
프로그램이 성공적으로 전화된 후 메뉴 바의 를 클리합니다.
-
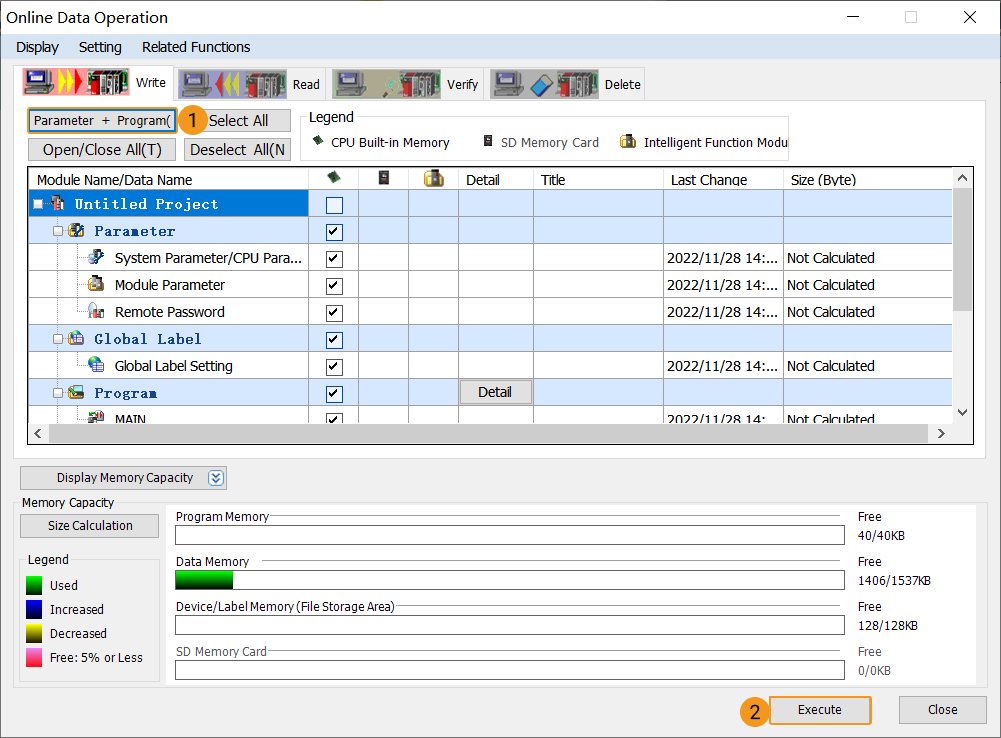
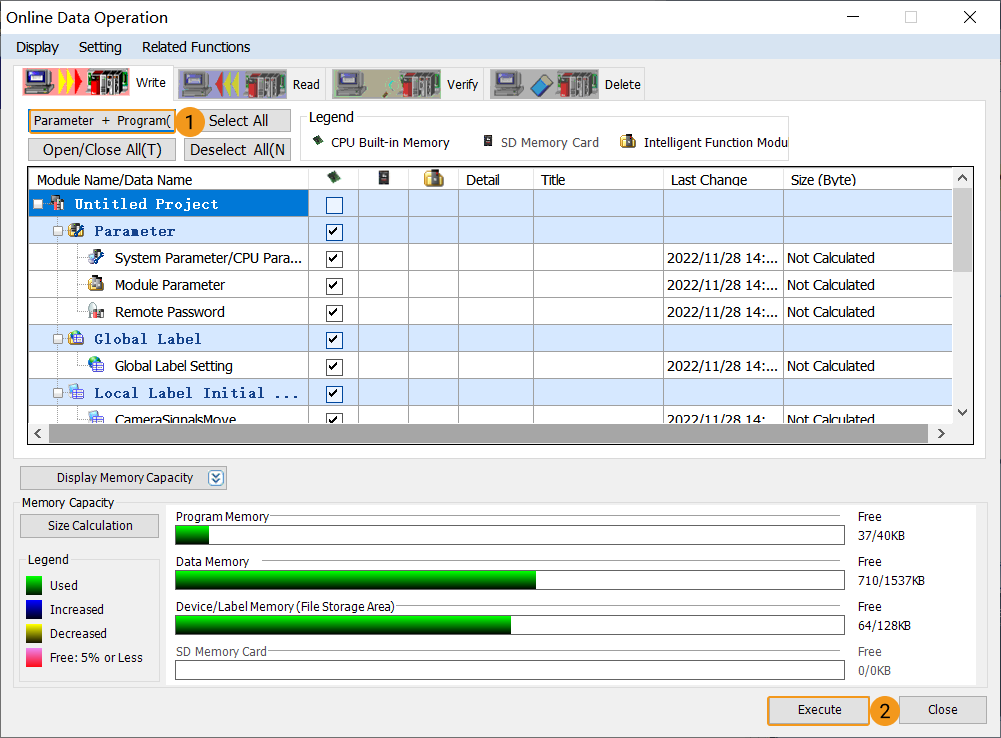
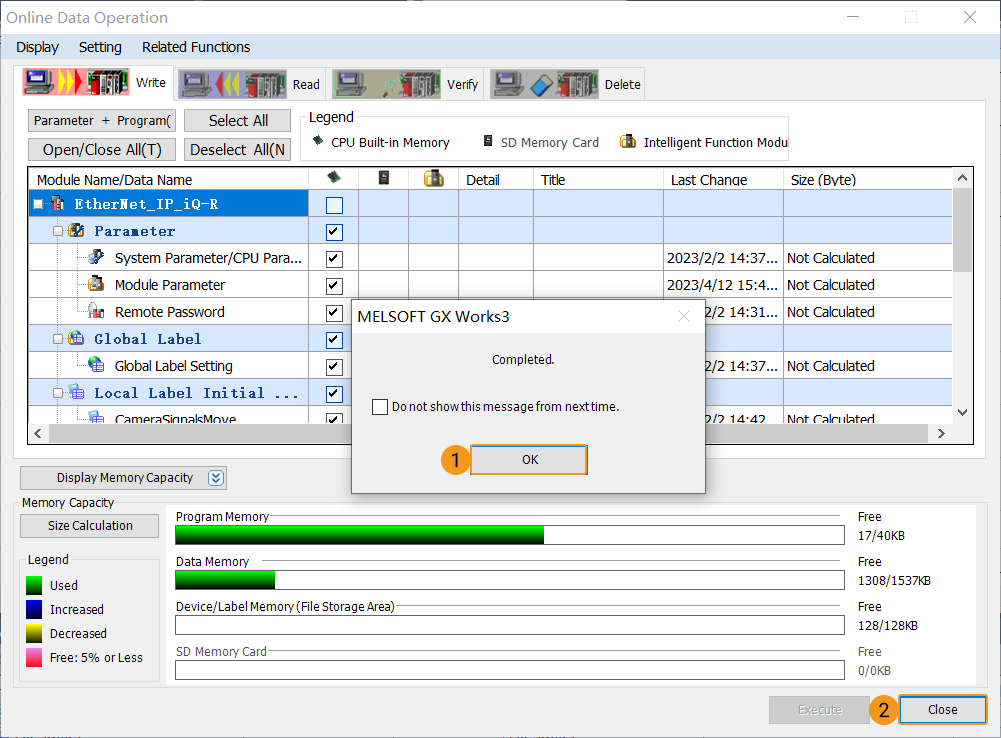
Online Data Operation 창에서 Write 탭을 선택하고 Parameter + Program 클릭한 후 Execute를 클릭합니다.
-
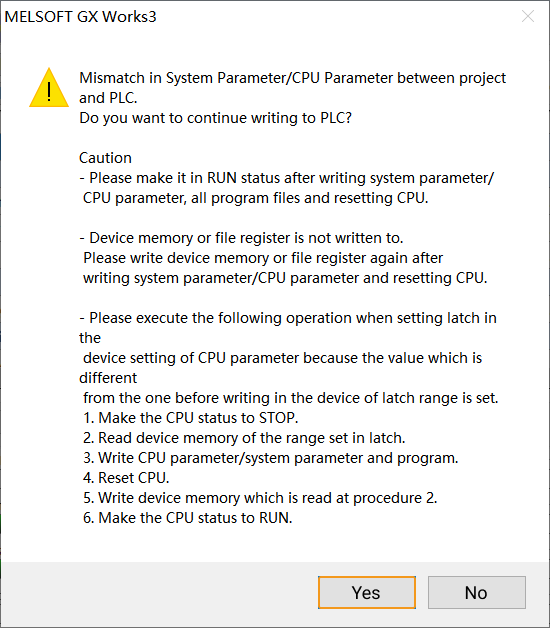
다음과 같은 창이 나타나면 Yes를 클릭합니다.
-
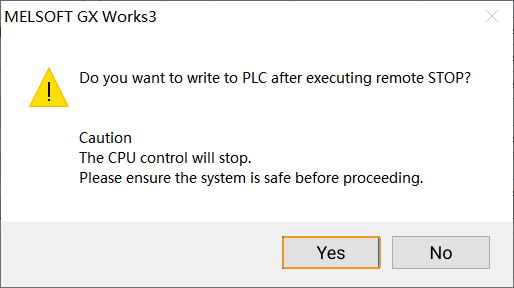
시스템 안전이 보장된다면 Yes를 클릭합니다.
-
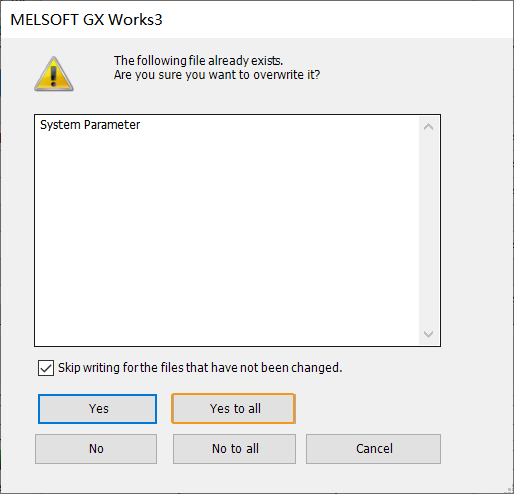
Are you sure you want to overwrite it? 창에서 Yes to all를 클릭합니다.
-
다운로드드 성공 후 다음과 같은 창이 나타납니다. 시스템 안전이 보장된다면 Yes를 클릭합니다.
-
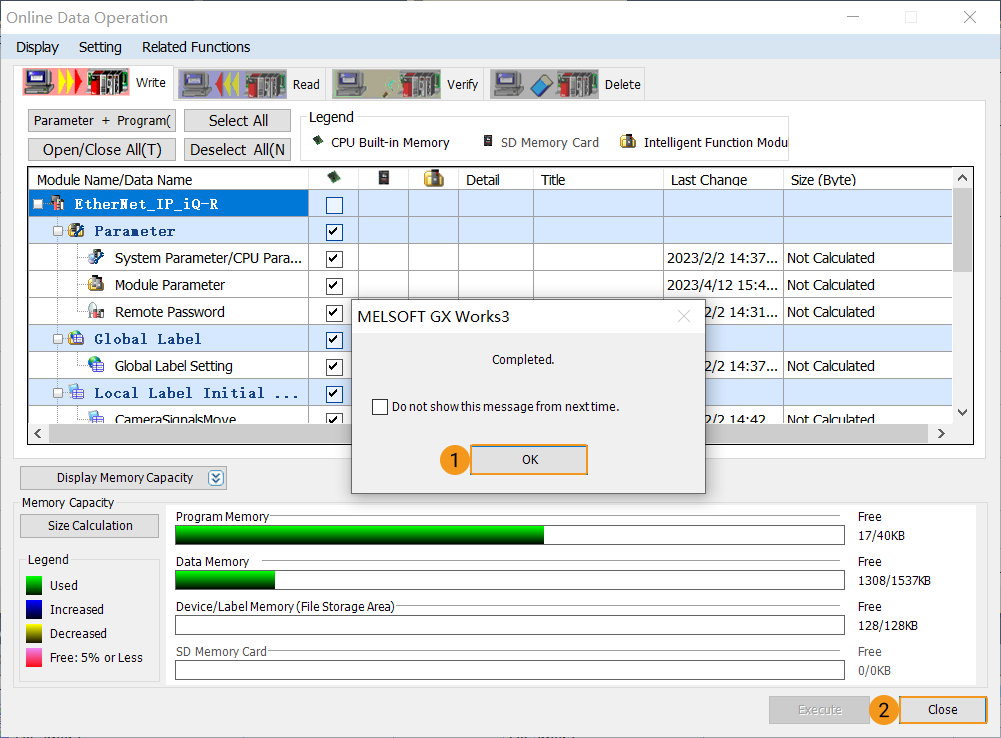
Completed 창에서 OK를 클릭합니다. Online Data Operation 창에 돌아가서 Close를 클릭합니다.
-
-
PLC를 재부팅하여 구성을 적용합니다.
EDS 파일 설치 및 구성
소프트웨어로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 디테일 작업을 확인하십시오.
-
0000:RJ71EIP91 Module Parameter 창에 돌아가서 EtherNet/IP Configuration Tool 아니콘을 더블 클릭하여 EIP Configuration Tool for RJ71EIP91 구성 소프트웨어를 시작합니다.
-
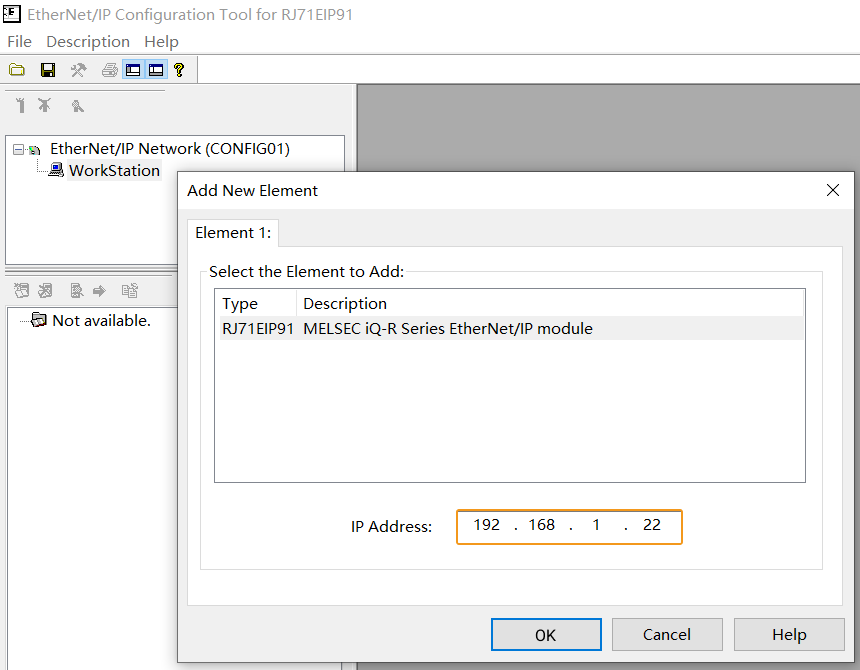
Add New Element 창이 나타나면 RJ71EIP91 모듈의 IP 주소를 입력합니다. 이 IP 주소는 GX Works에서 설정된 "0000:RJ71EIP91 module parameter"의 IP 주소와 일치해야 합니다. 그 다음 OK를 클릭합니다.
-
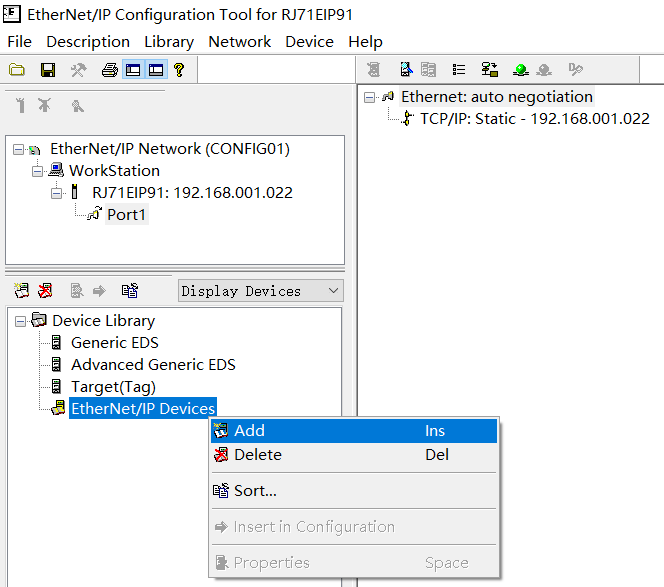
EIP Configuration Tool for RJ71EIP91 창에서 Device Library 를 확장합니다. 마우스 오른쪽 버튼으로 EtherNet/IP Devices 를 클릭하고 마우스 왼쪽 버튼으로 Add 를 클릭하면 EDS Management 창이 나타납니다.
-
EDS Management 창에서 Next을 클릭합니다.
-
Browse를 클릭하면 파일 열기 창이 나타나고, Software EIP.eds 파일을 선택한 후(미리 IPC에서 복사해 두어야 함), Next를 클릭합니다.
Software EIP.eds 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의 통신 구성 요소/Robot_Interface/EthernetIP/EDS폴더에 있습니다.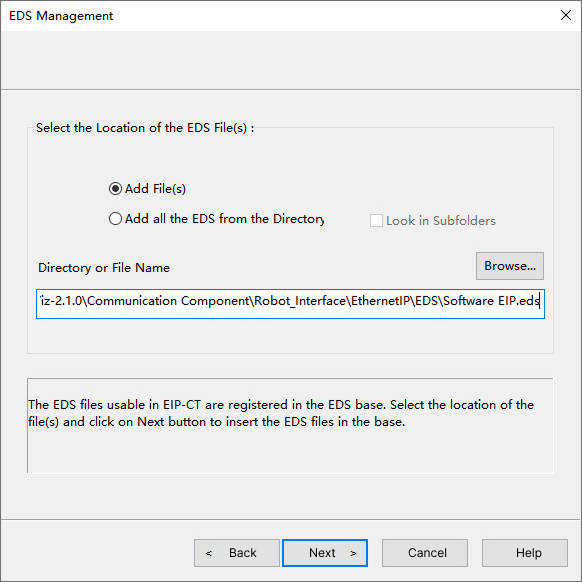
-
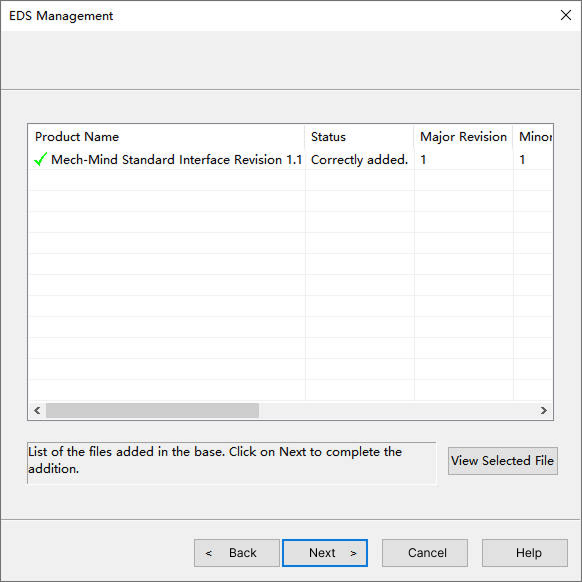
Next를 클릭합니다.
-
OK를 클릭합니다.
-
-
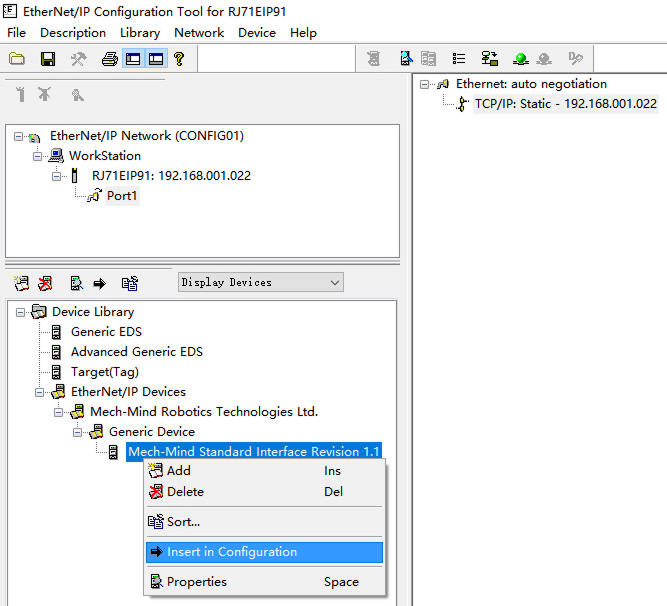
EDS 파일이 성공 추가된 후 EtherNet/IP Devices/Mech-Mind Robotics Technologies Ltd./Generic Device를 순서대로 펼치고 Mech-Mind Standard Interface …를 우클릭한 후 Insert in Configuration 을 클릭하여 EtherNet/IP 네트워크에 추가하십시오. 구성 창이 팝업됩니다.
-
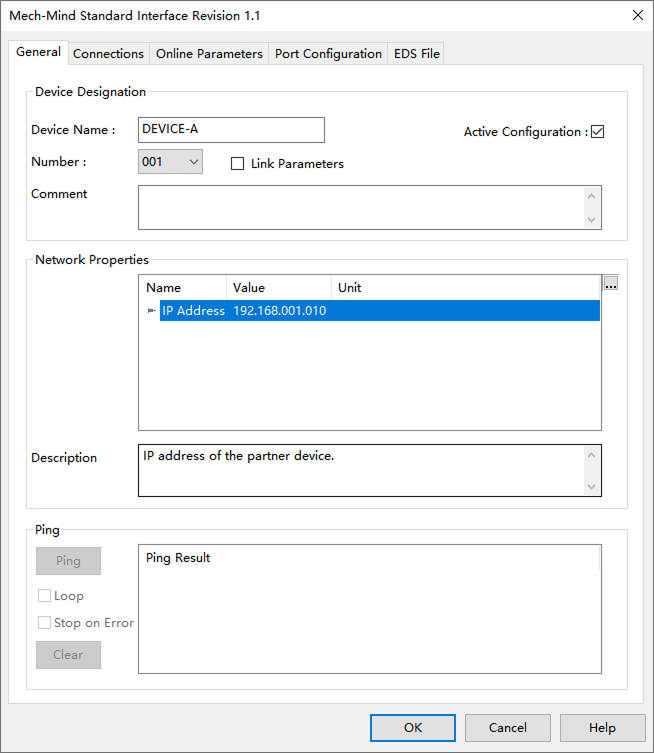
General 탭에서 비전 시스템의 슬레이브 IP 주소를 설정합니다.
여기의 IP 주소는 Mech-Vision 로봇 통신 구성에서 선택한 네트위크 어댑터 IP 주소 와 일치해야 합니다.
-
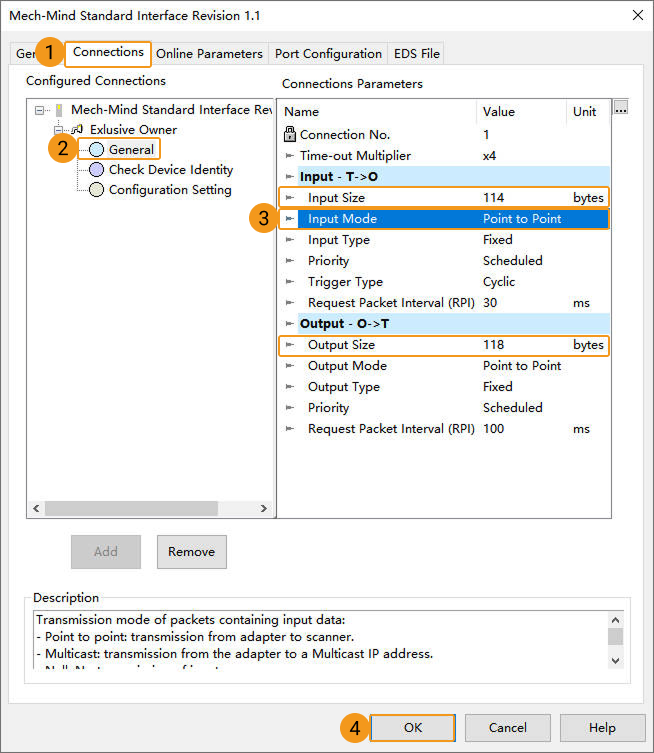
Connections 탭에서 General 을 클릭합니다. Input Mode 값을 "Point to Point"로 수정하고 Input Size 및 Output Size 통신 데이터 길이를 기록합니다. 마지막으로 OK를 클릭합니다.
-
하드웨어 PCI-e 통신 보드로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 디테일 작업을 확인하십시오.
-
0000:RJ71EIP91 Module Parameter 창에 돌아가서 EtherNet/IP Configuration Tool 아니콘을 더블 클릭하여 EIP Configuration Tool for RJ71EIP91 구성 소프트웨어를 시작합니다.
-
Add New Element 창이 나타나면 RJ71EIP91 모듈의 IP 주소를 입력합니다. 이 IP 주소는 GX Works에서 설정된 "0000:RJ71EIP91 module parameter"의 IP 주소와 일치해야 합니다. 그 다음 OK를 클릭합니다.
-
EIP Configuration Tool for RJ71EIP91 창에서 Device Library 를 확장합니다. 마우스 오른쪽 버튼으로 EtherNet/IP Devices 를 클릭하고 마우스 왼쪽 버튼으로 Add 를 클릭하면 EDS Management 창이 나타납니다.
-
EDS Management 창에서 Next을 클릭합니다.
-
Browse를 클릭하면 파일 열기 창이 나타나고, 005A002B003A0100.EDS 파일을 선택한 후(미리 IPC에서 복사해 두어야 함), Next를 클릭합니다.
005A002B003A0100.EDS 파일은 Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉터리의 통신 구성 요소/Robot_Interface/EthernetIP/EDS폴더에 있습니다.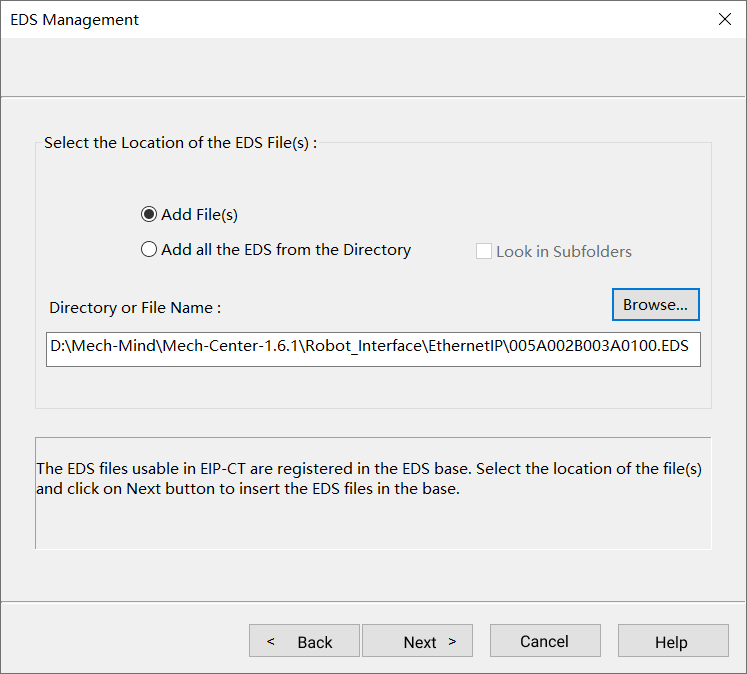
-
Next를 클릭합니다.
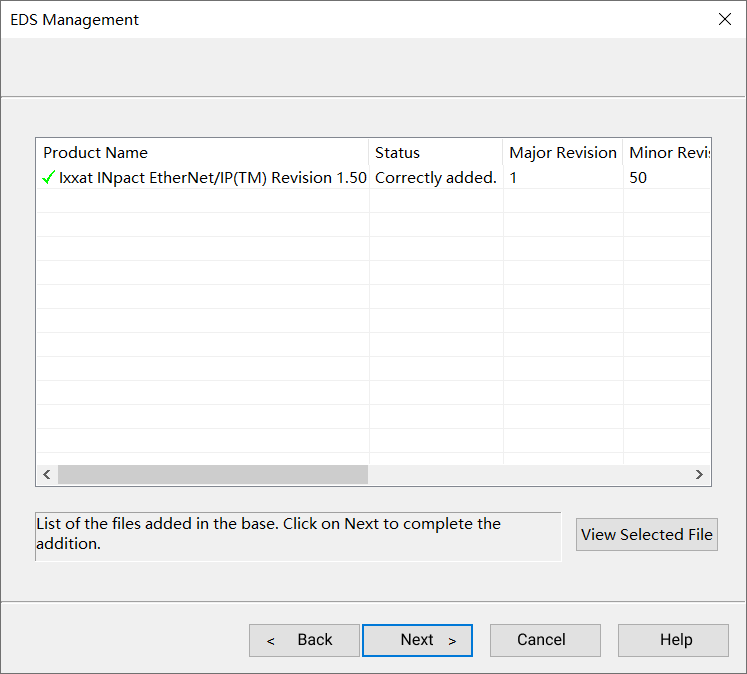
-
OK를 클릭합니다.
-
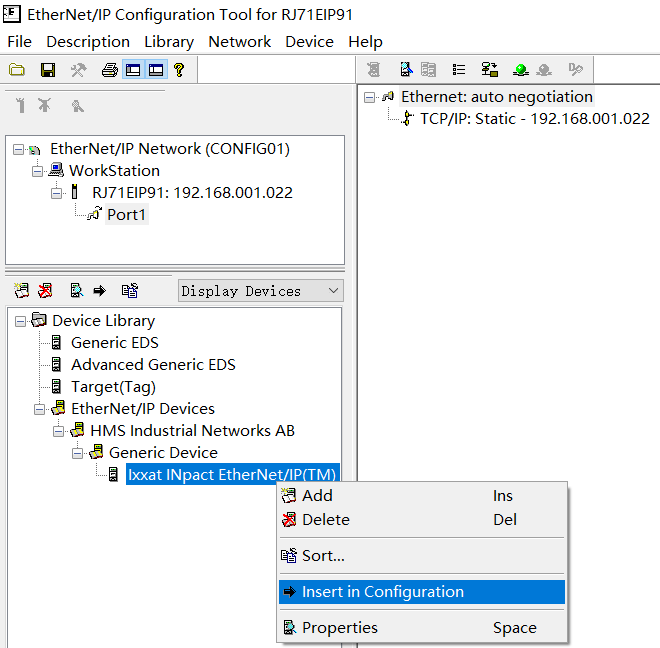
-
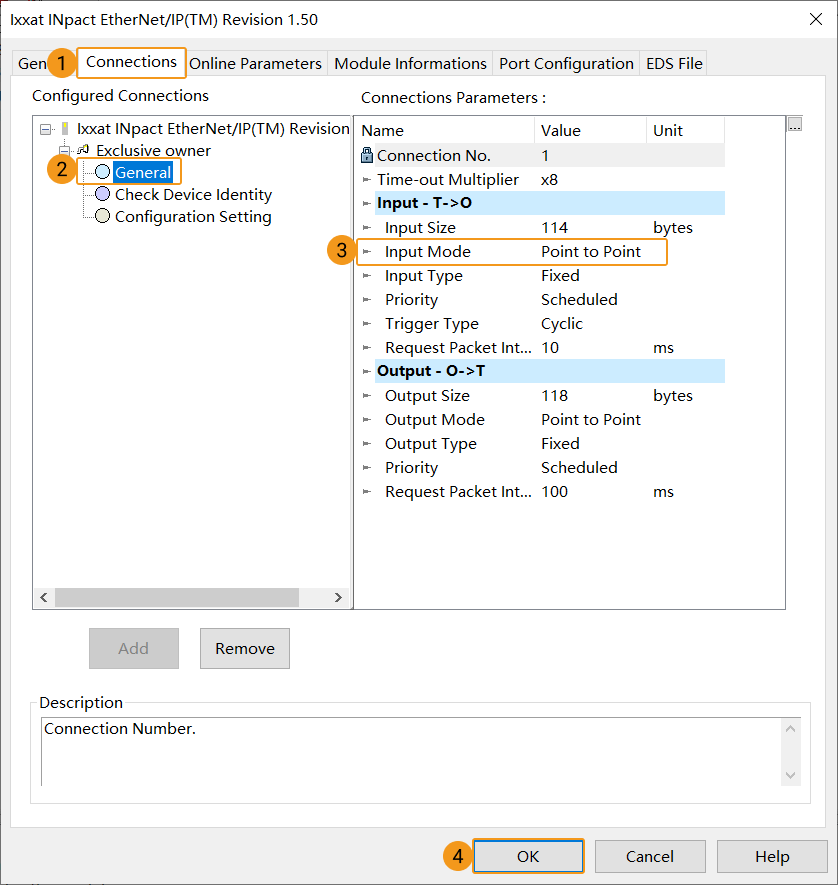
EDS 파일이 성공 추가된 후 EtherNet/IP Devices/HMS Industrial Networks AB/Generic Device를 펼치고 Ixxat INpact EtherNet/IP(TM)을 우클릭한 후 Insert in Configuration을 클릭하여 EtherNet/IP 네트워크에 추가하십시오. 구성 창이 팝업됩니다.
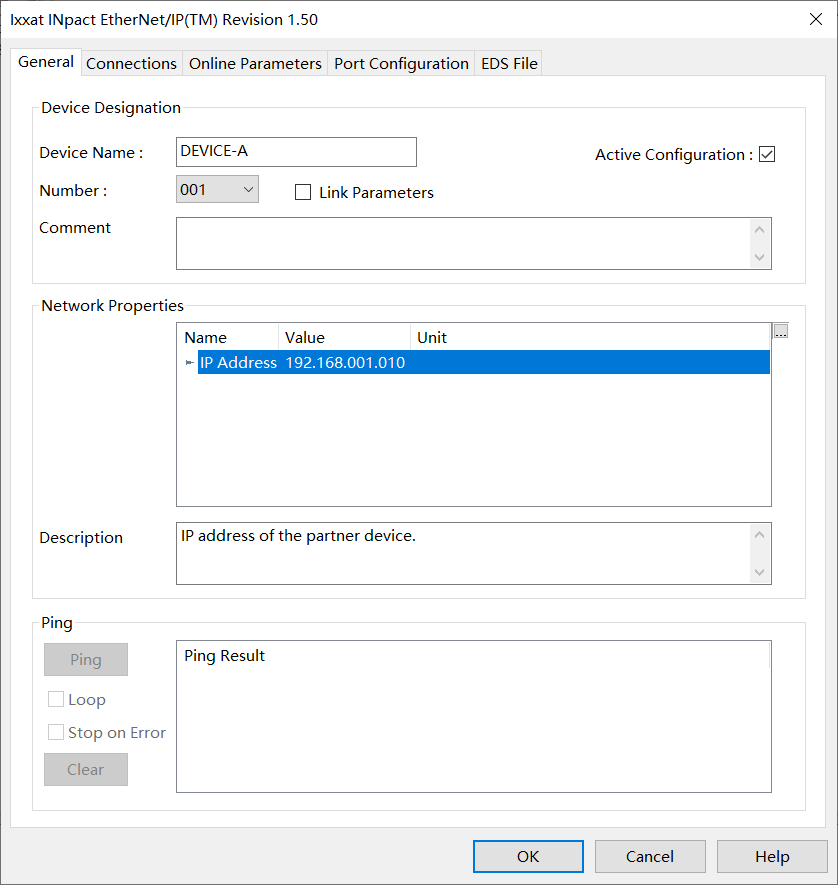
-
General 탭에서 비전 시스템의 슬레이브 IP 주소를 설정합니다.
여기의 IP 주소는 HMS IPconfig에서 설정한 IP 주소와 일치해야 합니다.
-
Connections 탭에서 General 을 클릭합니다. Input Mode 값을 "Point to Point"로 수정하고 Input Size 및 Output Size 통신 데이터 길이를 기록합니다. 마지막으로 OK를 클릭합니다.
-
PLC EtherNet/IP 네트워크 구성을 PLC에 다운로드
소프트웨어로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 디테일 작업을 확인하십시오.
-
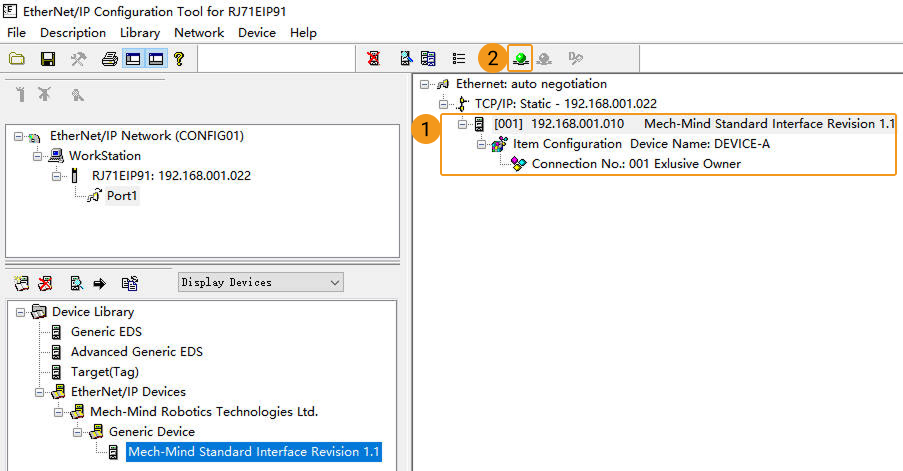
장치가 정상적으로 추가되었는지 확인합니다. 아래 그림과 같이 장치 옵션이 표시되면 성공입니다. 툴 바의 Online command 아이콘을 클릭합니다.
-
"Do you want to save the configuration before to go online?"라는 팝업창이 나타납니다. Yes를 클릭하여 온라인인 모드로 들어갑니다.
-
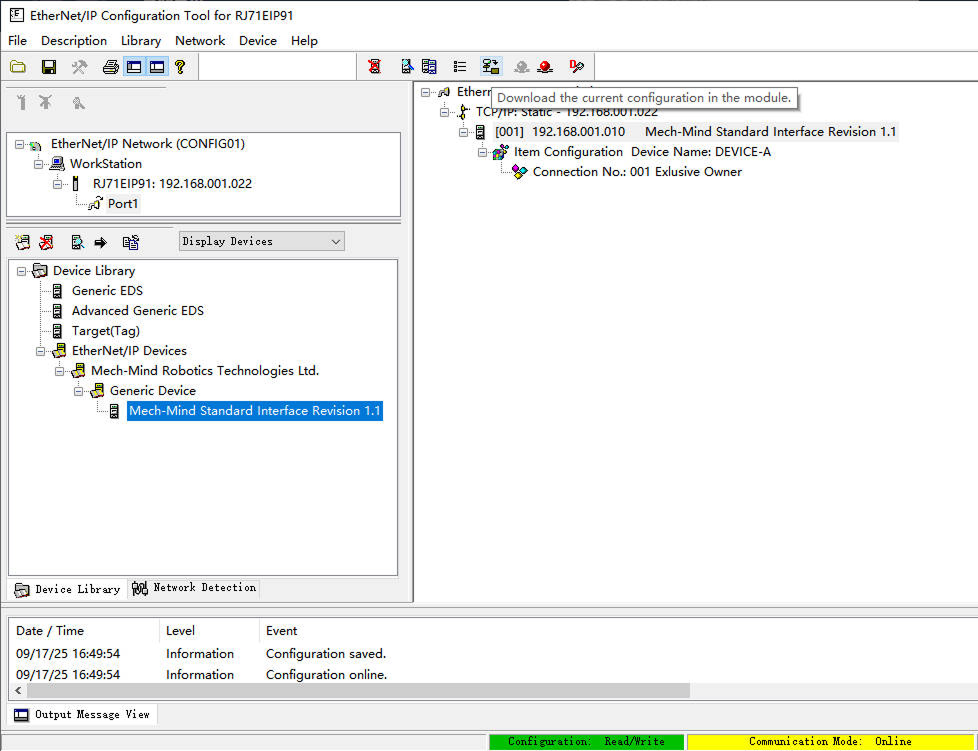
Online 모드에서 툴 바의 Download the current configuration in the module 아이콘을 클리하여 설정된 파라미터를 EtherNet/IP 통신 모듈 RJ71EIP91에 입력합니다.
-
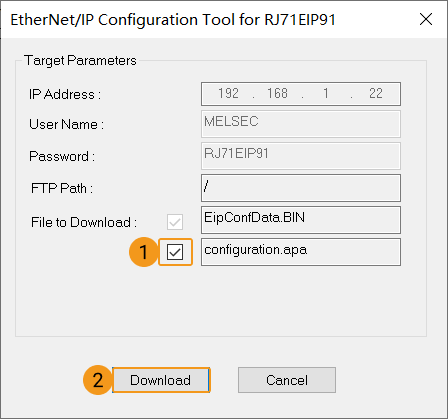
팝업창에서 configuration.apa를 체크하면 구성 파일(configuration.apa)을 다운로드할 수 있음을 나타내며, 이를 통해 이후 구성 파일을 업로드하고 다시 편집하는 것이 용이해집니다. Download 버튼을 클릭합니다.
-
다음과 같은 창이 나타나면 OK를 클릭합니다.
-
-
PLC를 재부팅하여 구성을 적용합니다.
하드웨어 PCI-e 통신 보드로 EtherNet/IP 통신을 구현하려면 이 행을 클릭하여 디테일 작업을 확인하십시오.
-
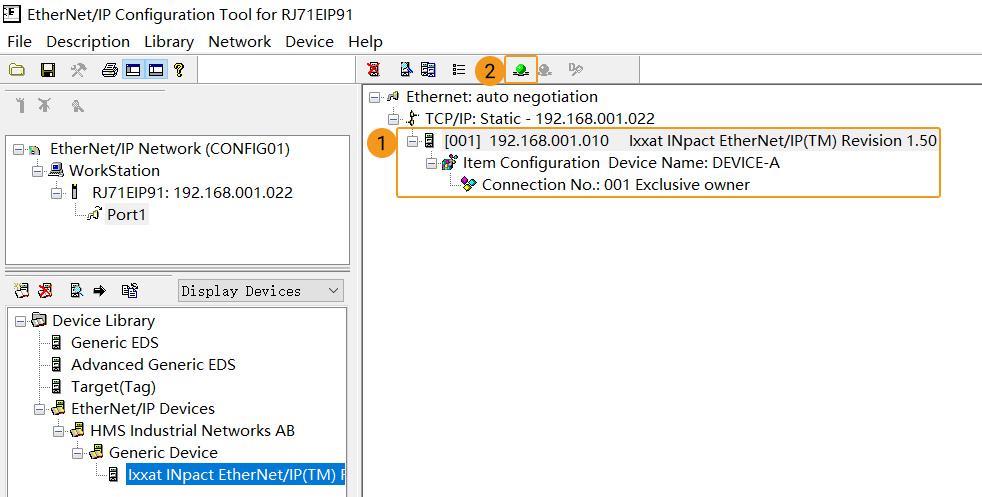
장치가 정상적으로 추가되었는지 확인합니다. 아래 그림과 같이 장치 옵션이 표시되면 성공입니다. 툴 바의 Online command 아이콘을 클릭합니다.
-
"Do you want to save the configuration before to go online?"라는 팝업창이 나타납니다. Yes를 클릭하여 온라인인 모드로 들어갑니다.
-
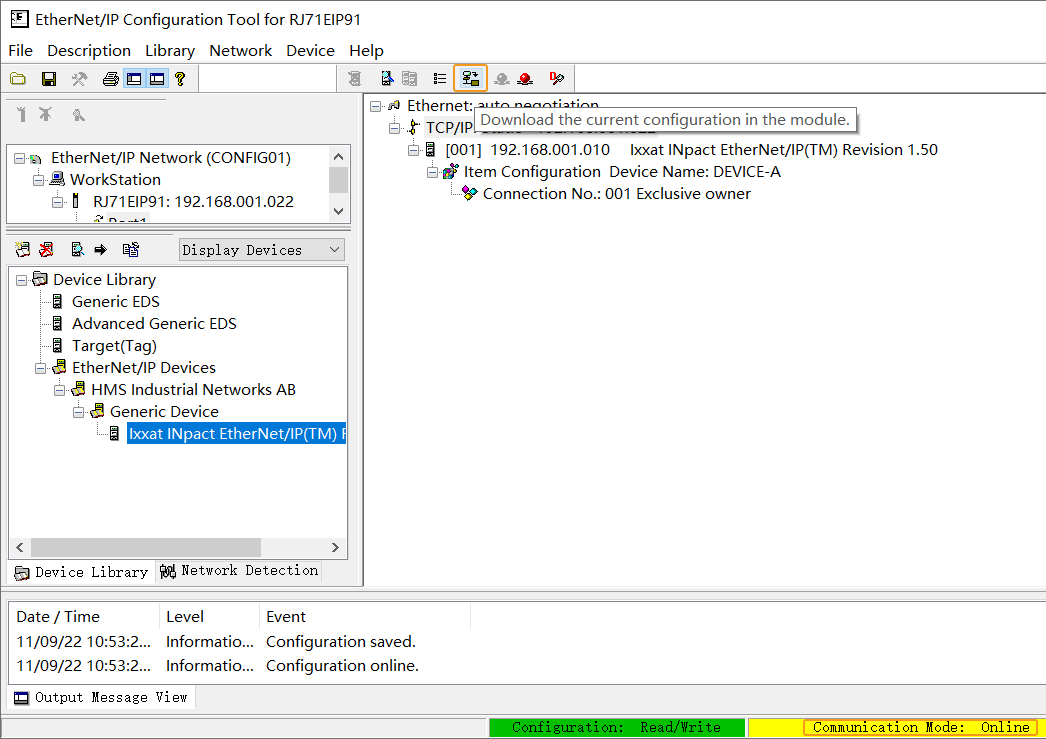
Online 모드에서 툴 바의 Download the current configuration in the module 아이콘을 클리하여 설정된 파라미터를 EtherNet/IP 통신 모듈 RJ71EIP91에 입력합니다.
-
팝업창에서 configuration.apa를 체크하면 구성 파일(configuration.apa)을 다운로드할 수 있음을 나타내며, 이를 통해 이후 구성 파일을 업로드하고 다시 편집하는 것이 용이해집니다. Download 버튼을 클릭합니다.
-
다음과 같은 창이 나타나면 OK를 클릭합니다.
-
-
PLC를 재부팅하여 구성을 적용합니다.
샘플 파일을 가져오기 및 PLC에 다운로드
Mech-Mind 샘플 파일을 가져오기
| Mech-Mind 샘플 파일을 가져와 테스트하려면 새로 생성한 PLC 프로젝트를 사용하십시오. 기존 PLC 프로젝트에 추가해야 할 경우, 먼저 새 프로젝트를 생성하여 가져와 테스트한 후 최종적으로 기존 프로젝트에 복사하는 것을 권장합니다. |
-
GX Works3 소프트웨어로 돌아가고 메뉴 바에서 순서대로 를 클릭합니다.
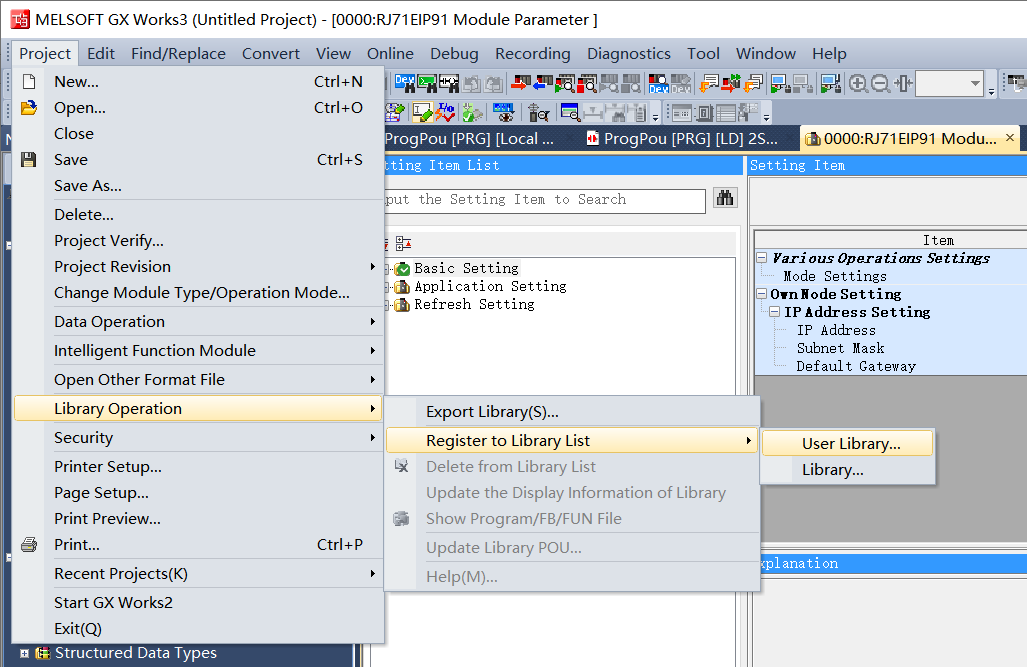
다음과 같은 창이 나타나면 OK를 클릭합니다.
-
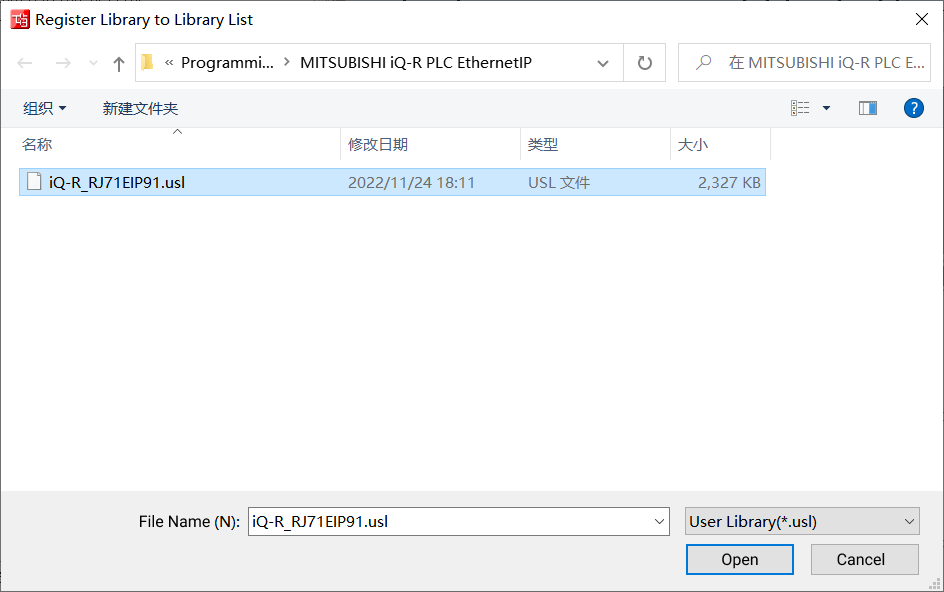
Register Library to Library List 창에서 비전 통신 샘플 파일 "iQ-R_RJ71EIP91.usl"를 선택하고(미리 IPC에서 이 파일을 복사 해야 함) Open을 클릭합니다.
-
GX Works3 소프트웨어로 돌아가고 오른쪽 Element Selection 에서 두 샘플 파일 "CameraSignalsMove" 및 "CameraTest"를 선택합니다. 마우스 오른쪽 버튼으로 순서대로 을 선택합니다.
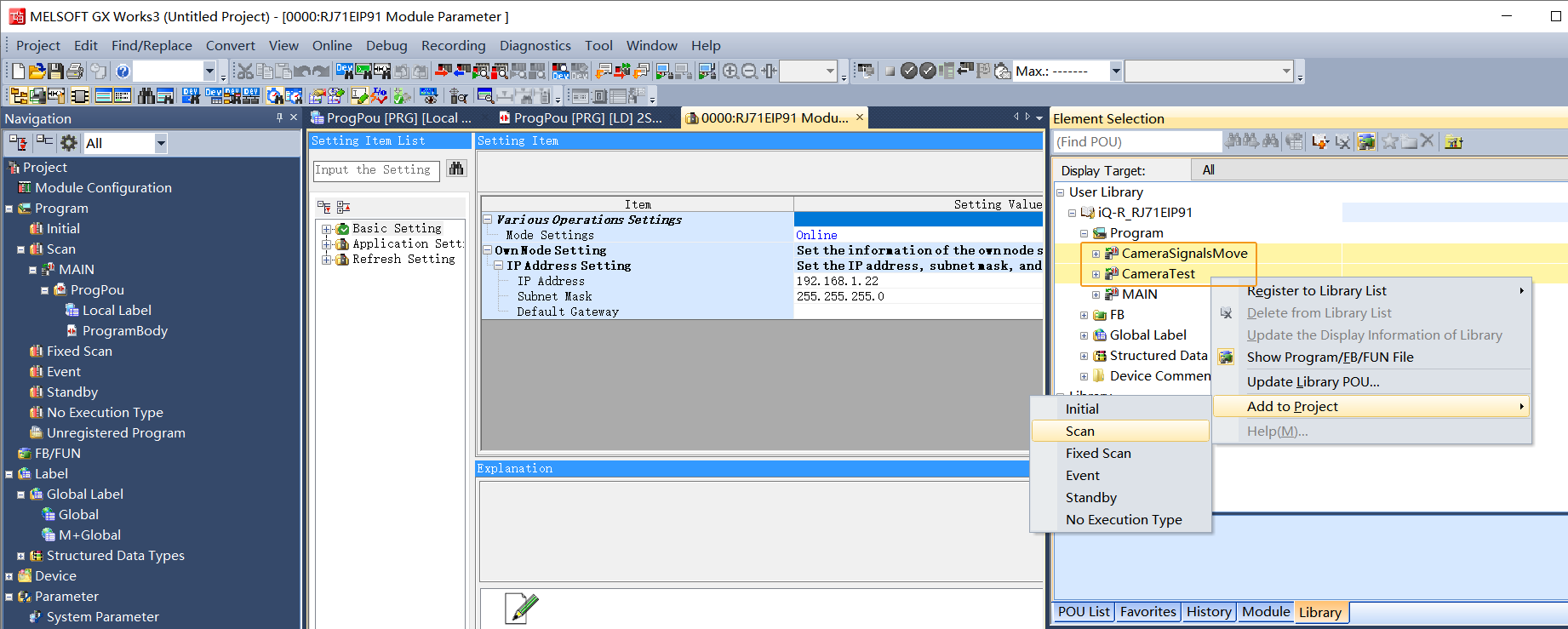
다음과 같은 창이 나타나면 Yes를 클릭합니다.
-
GX Works3 소프트웨어로 돌아가서 왼쪽 프로젝트 패널에 샘플 프로그램, 기능 블록, 레이블을 다 가져온지 확인하고 순서대로 메뉴 바의 를 클릭합니다.
다음과 같은 창이 나타나면 OK를 클릭합니다.
프로그램을 PLC에 다운로드
-
프로그램이 성공적으로 전화된 후 메뉴 바의 를 클리합니다.
-
Online Data Operation 창에서 Write 탭을 선택하고 Parameter + Program 클릭한 후 Execute를 클릭합니다.
-
다음과 같은 창이 나타나면 Yes를 클릭합니다.
-
시스템 안전이 보장된다면 다음과 같이 팝업된 창에서 Yes를 클릭합니다.
-
Are you sure you want to overwrite it? 창에서 Yes to all를 클릭합니다.
-
다운로드드 성공 후 다음과 같은 창이 나타납니다. 시스템 안전이 보장된다면 Yes를 클릭합니다.
-
Completed 창에서 OK를 클릭합니다. Online Data Operation 창에 돌아가서 Close를 클릭합니다.
-
통신이 성공한지 여부 확인
-
GX Works3 소프트웨어로 돌아가서 내비게이션 ProgramBody 를 더블 클릭합니다.
-
순서대로 메뉴 바의 를 클릭합니다.
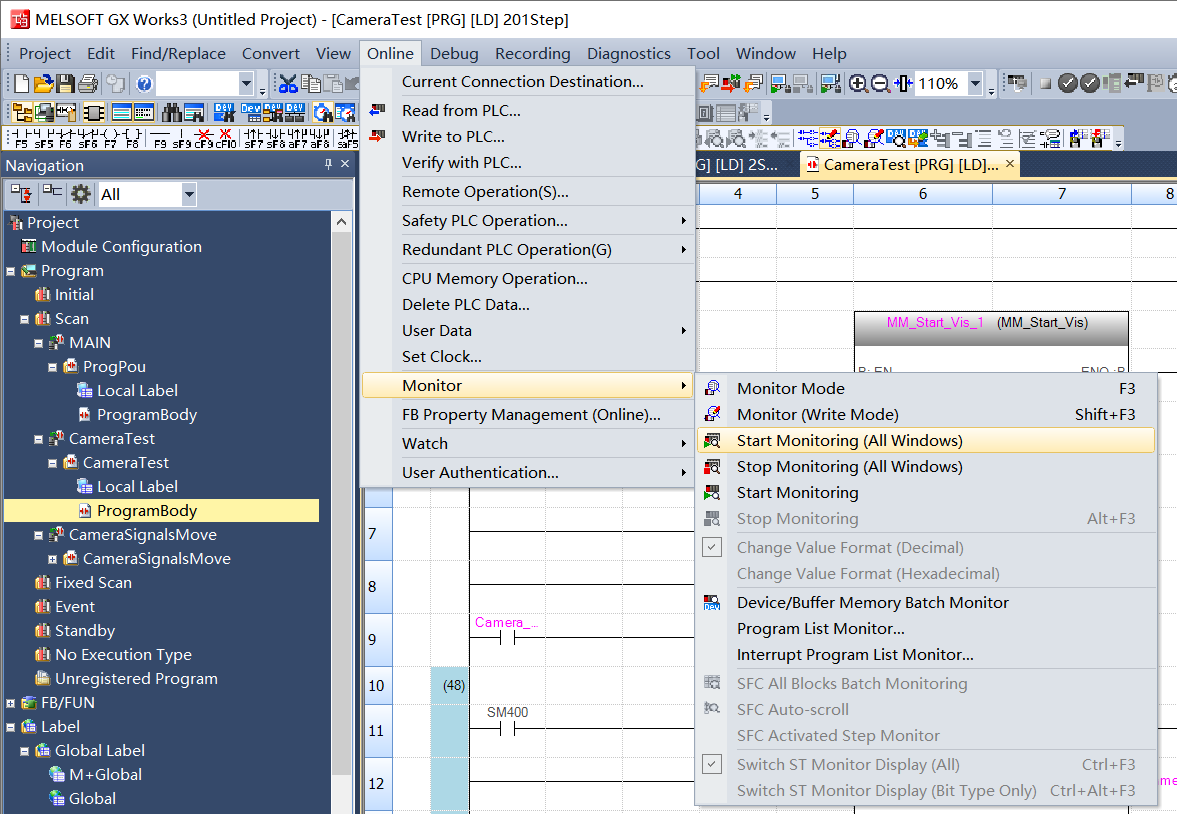
연결이 성공하면 FromCamera.HEARTBEAT 하트비트 신호 모니터링 값은 계속해서 변경됩니다.

-
Mech-Vision 메인 화면에 연결이 성공하면 로그 창의 콘솔 탭에 ETHERNET IP 컨트롤러 연결 성공 라는 메시지가 표시됩니다. 해당 로그가 없는 경우 다음 사항이 정상인지 확인해 주시기 바랍니다.
-
하드웨어 네트워크 연결이 정상인지 여부
-
Mech-Vision 인터페이스 서비스가 정상인지 여부
-
PLC 프로그램이 PLC 하드웨어에 성공적으로 다운로드되었는지 여부
-
비전 프로젝트 테스트
이 섹션에서는 샘플 프로그램 기능 블록으로 Mech-Vision 프로젝트를 트리거하여 비전 포인트를 획득하고 Mech-Viz 프로젝트를 트리거하여 계획 경로를 획득하는 방법을 소개합니다.
사전 준비
-
Mech-Vision 소프트웨어로 돌아가서 Mech-Vision 프로젝트를 구축합니다. 창 목록에서 솔루션 이름을 마우스 오른쪽 버튼으로 클릭하고 해당 프로젝트를 자동으로 로드하기 를 체크합니다. 해당 솔루션 아래의 프로젝트도 자동으로 로드되도록 설정되며, 프로젝트 이름 앞에 특정 프로젝트 번호가 표시됩니다.
-
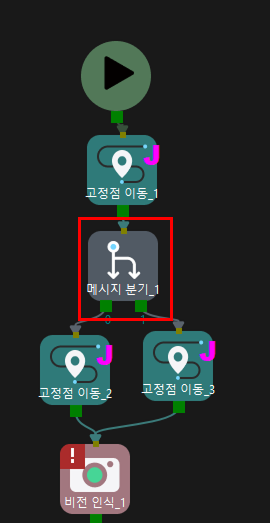
Mech-Viz 프로젝트를 구축합니다. Mech-Viz 프로젝트 리소스 화면에서 프로젝트 명칭을 마우스 오른쪽 버튼으로 클릭하여 *해당 프로젝트를 자동으로 로드하기*를 선택합니다.
테스트에 사용된 Mech-Viz 프로젝트에는 아래와 같이 1로 이름이 바뀐 "메시지 분기" 스텝이 포함되어야 합니다.
Mech-Vision 에서 비전 포인트를 획득하기
파라미터를 설정하기
-
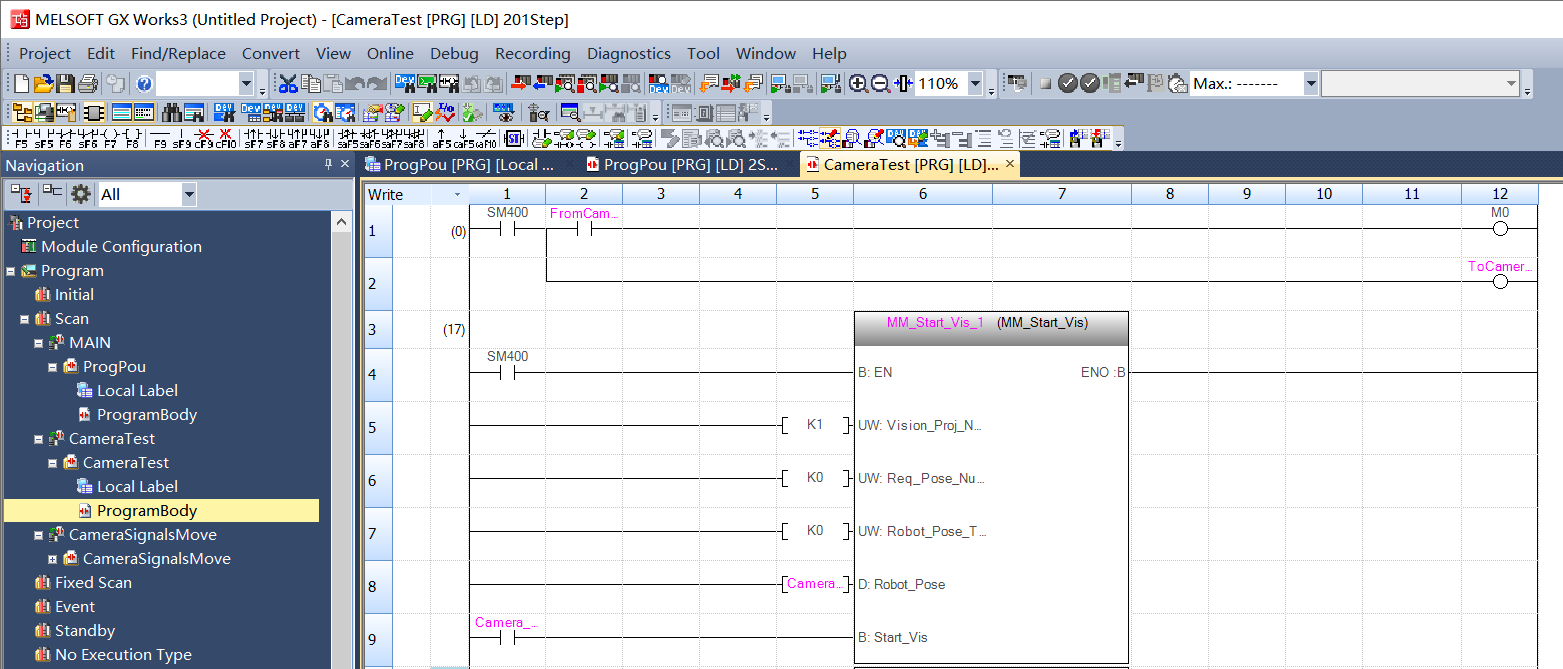
GX Works3 소프트웨어 창으로 돌아가 CameraTest 프로그램 본체를 더블 클릭한 후, ToCamera.COMM_ENABLE 상태를 항상 ON으로 설정합니다.

-
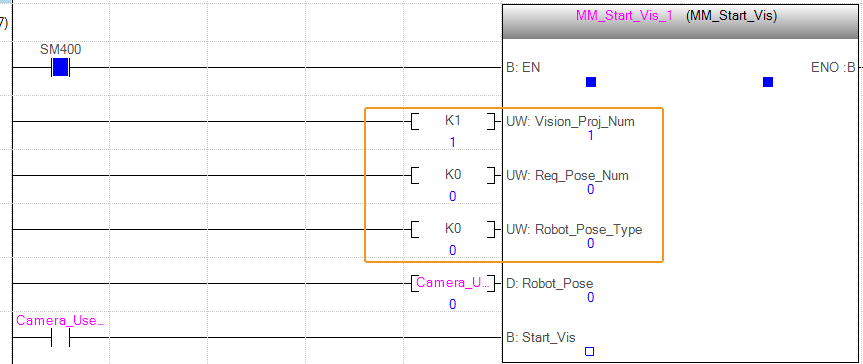
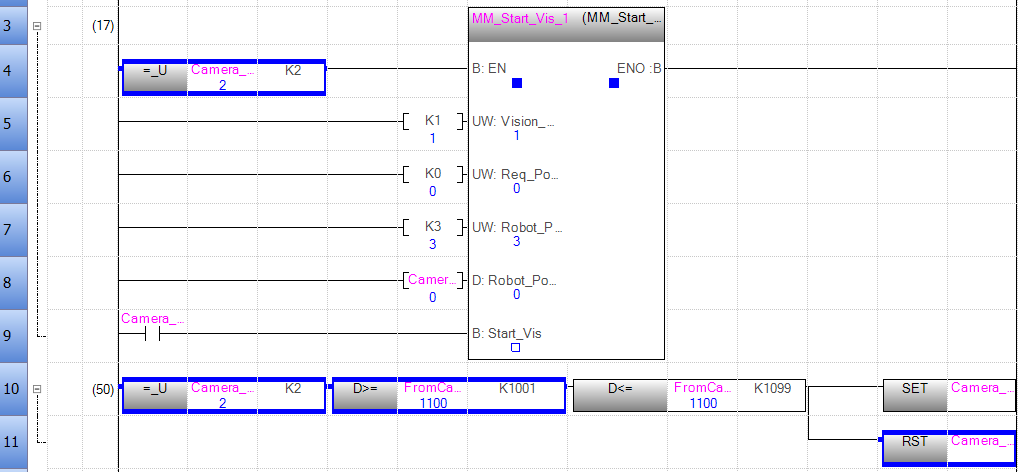
MM_Start_Vis 기능 블록을 클릭하여 다음과 같이 포트 값을 설정합니다.
-
Vision_Proj_Num의 포트 값을 1 로 설정합니다. 프로젝트 번호가 1인 Mech-Vision 프로젝트를 실행함을 의미합니다.
-
Req_Pose_Num의 포트 값을 0 으로 설정합니다. Mech-Vision가 모든 포즈 결과를 반환함을 의미합니다.
-
Robot_Pose_Type의 포트 값을 0 으로 설정합니다. 프로젝트가 Eye to Hand 모드임을 의미하며 이미지 캡처 포즈를 전송할 필요가 없습니다.
-
Mech-Vision 프로젝트 실행을 트리거하기
-
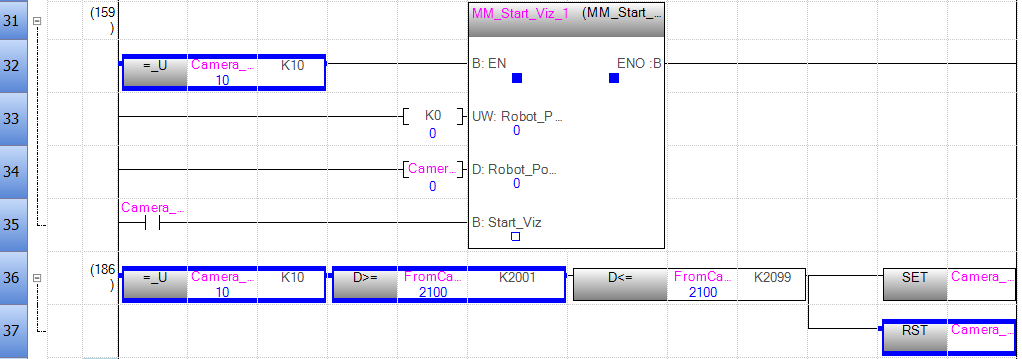
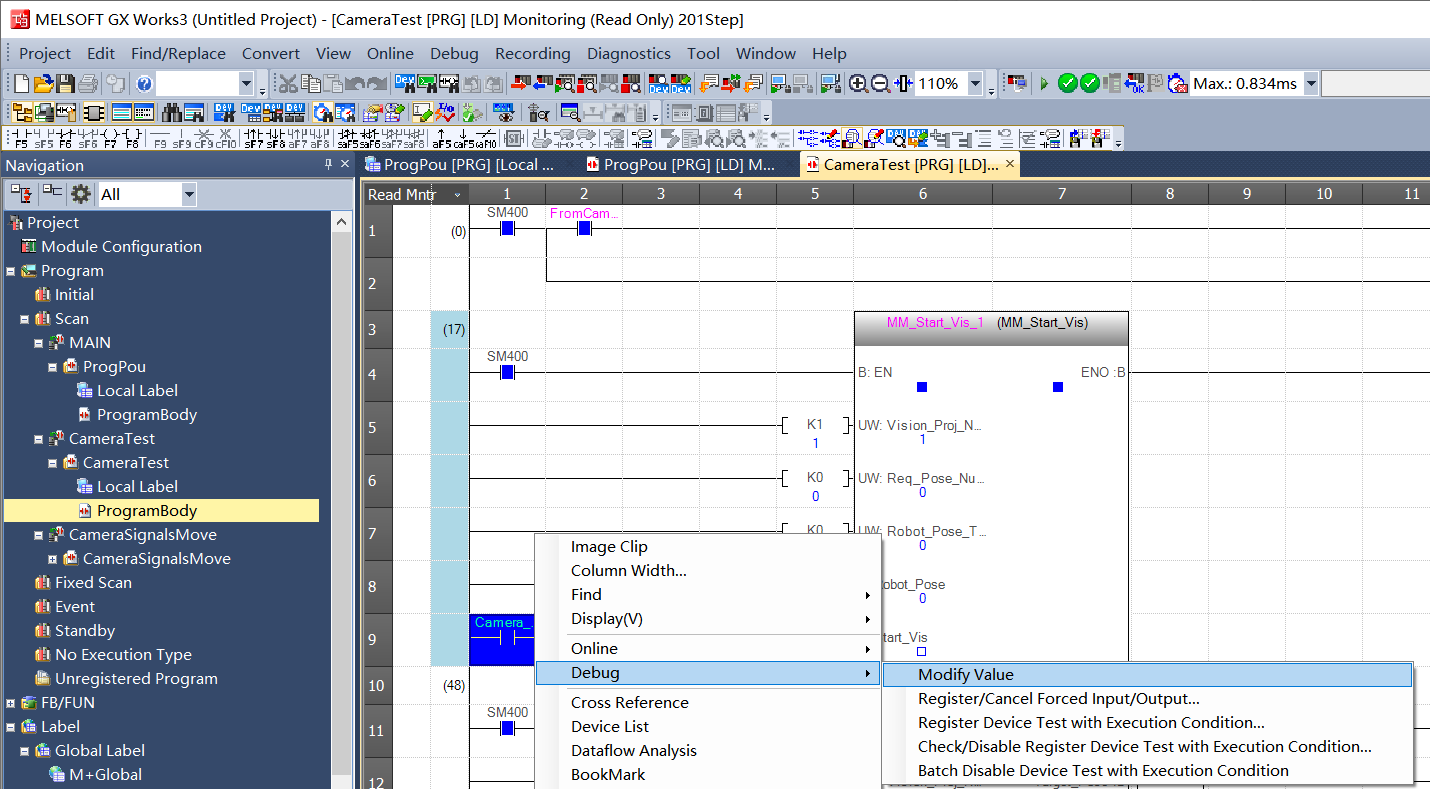
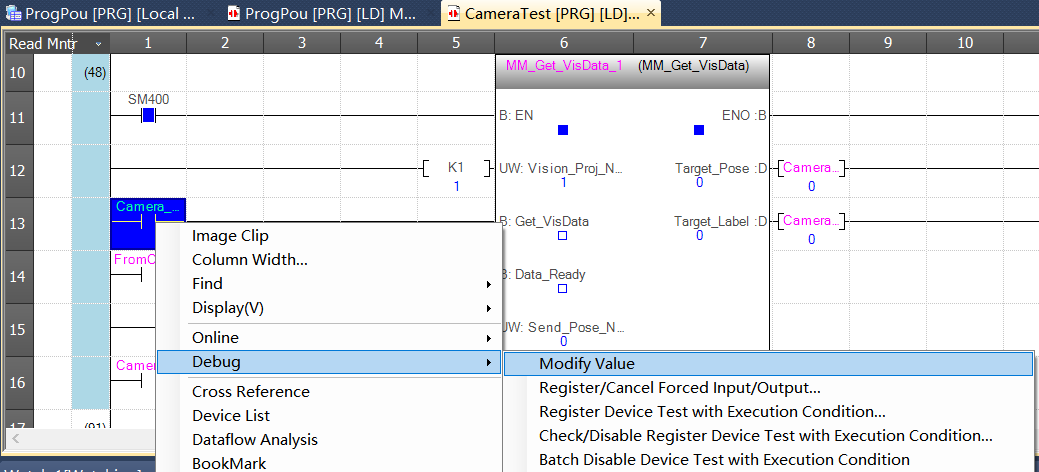
GX Works3 창에서 "MM_Start_Vis" 입력 측의 "Camera_User.Start_Vis" 레이블을 오른쪽 마우스 버튼으로 클릭하고 순서대로 menu:Debug [Modify Value ]를 클릭합니다. Mech-Vision 프로젝트가 실행되도록 값을 1로 수정한 다음 값을 0으로 재설정합니다.
-
STATUS_CODE의 반환 값은 1102인지 확인합니다.
-
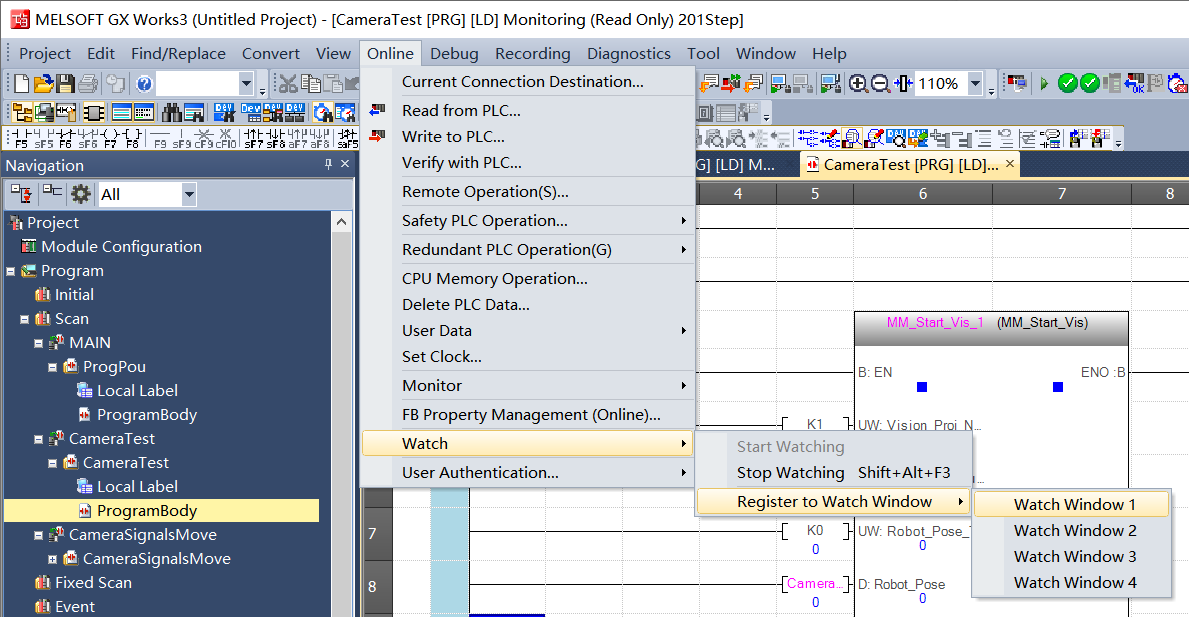
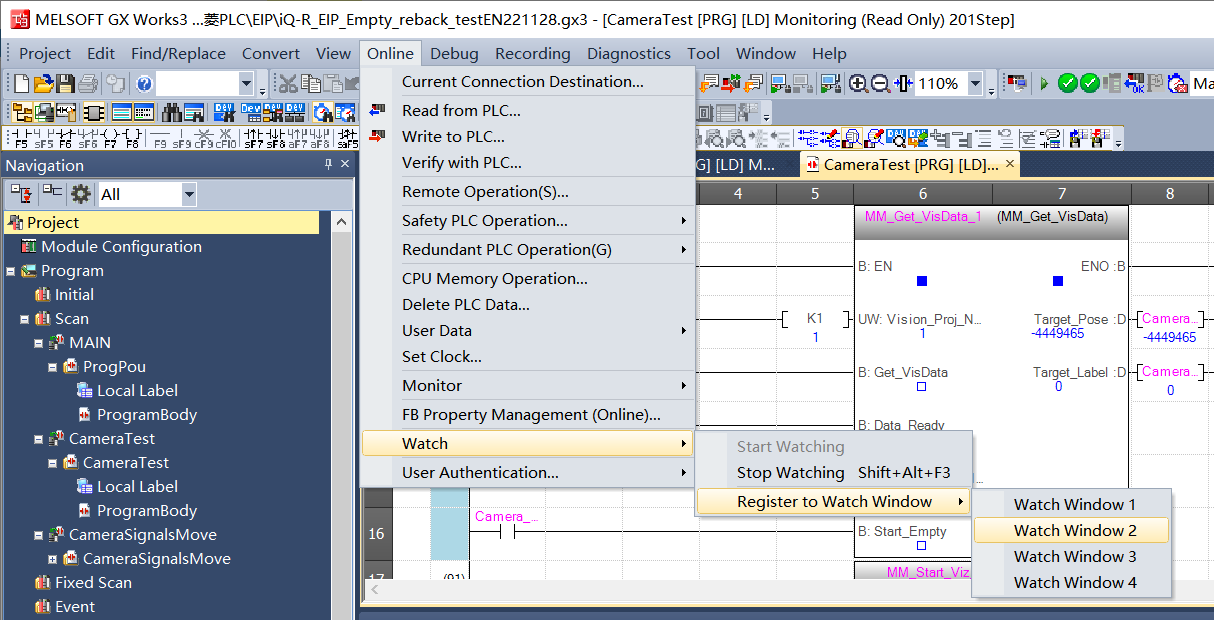
메뉴 바의 menu:Online [Watch> Register to Watch Window> Watch Window 1] 을 클릭합니다.
-
Watch 1 창의 이름 열에서 FromCamera 레이블을 찾습니다.
-
레이블 레벨을 확장하고 STATUS_CODE 반환 값을 확인합니다.
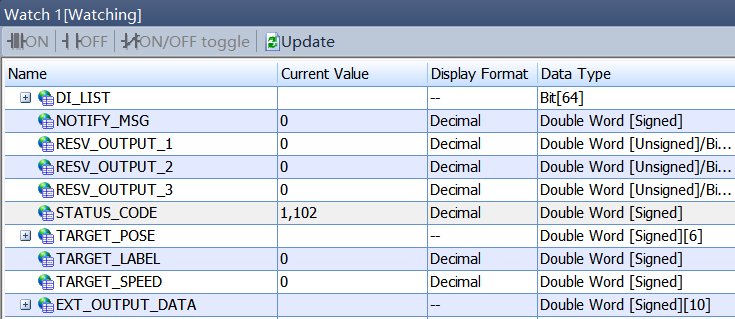
-
| 반환 값이 1102 인 경우 Mech-Vision 프로젝트를 성공적으로 트리거함을 의미합니다. 반환 값이 10XX인 경우 표준 인터페이스 상태 코드 및 오류 분석 내용을 참조하여 문제를 해결하십시오. |
Mech-Vision에서 계산된 포즈 결과를 획득하기
-
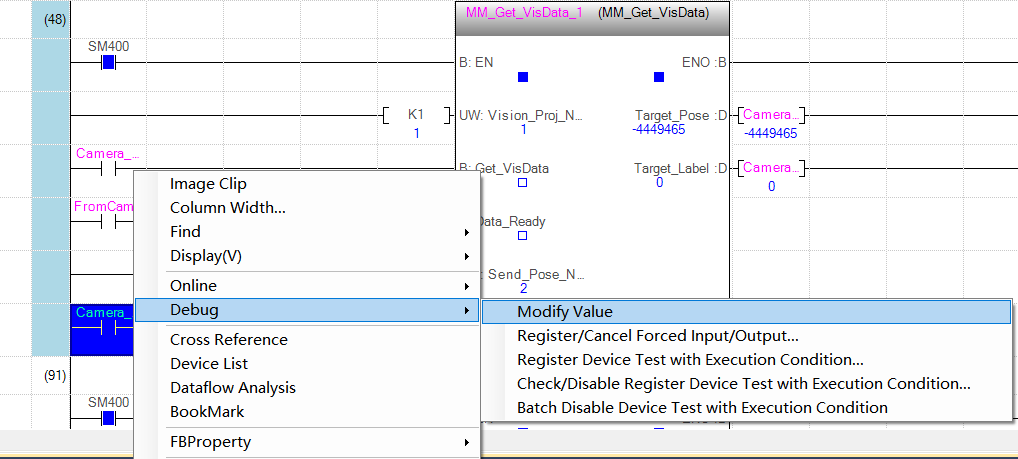
GX Works3 창에서 "MM_Get_VisData" 입력 측의 "Camera_User.Get_VisData" 레이블을 오른쪽 마우스 버튼으로 클릭하고 순서대로 menu:Debug [Modify Value ]를 클릭합니다. 포즈 결과를 획득하도록 값을 1로 수정한 다음 값을 0으로 재설정합니다.
-
Watch Window 1에서 STATUS_CODE 반환 값을 확인합니다.
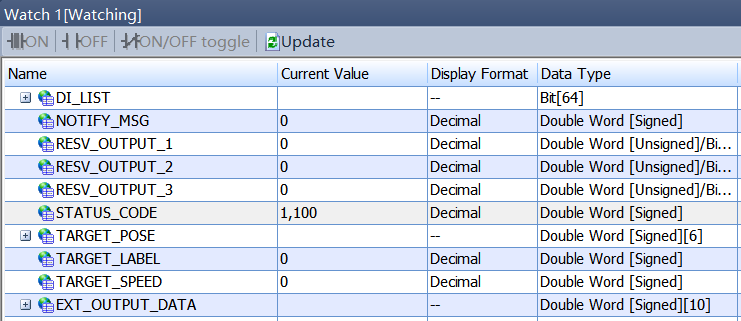
반환 값이 1100 인 경우 Mech-Vision 에서 성공적으로 비전 포인트를 획득함을 의미합니다. 반환 값이 10XX인 경우 표준 인터페이스 상태 코드 및 오류 분석 내용을 참조하여 문제를 해결하십시오. -
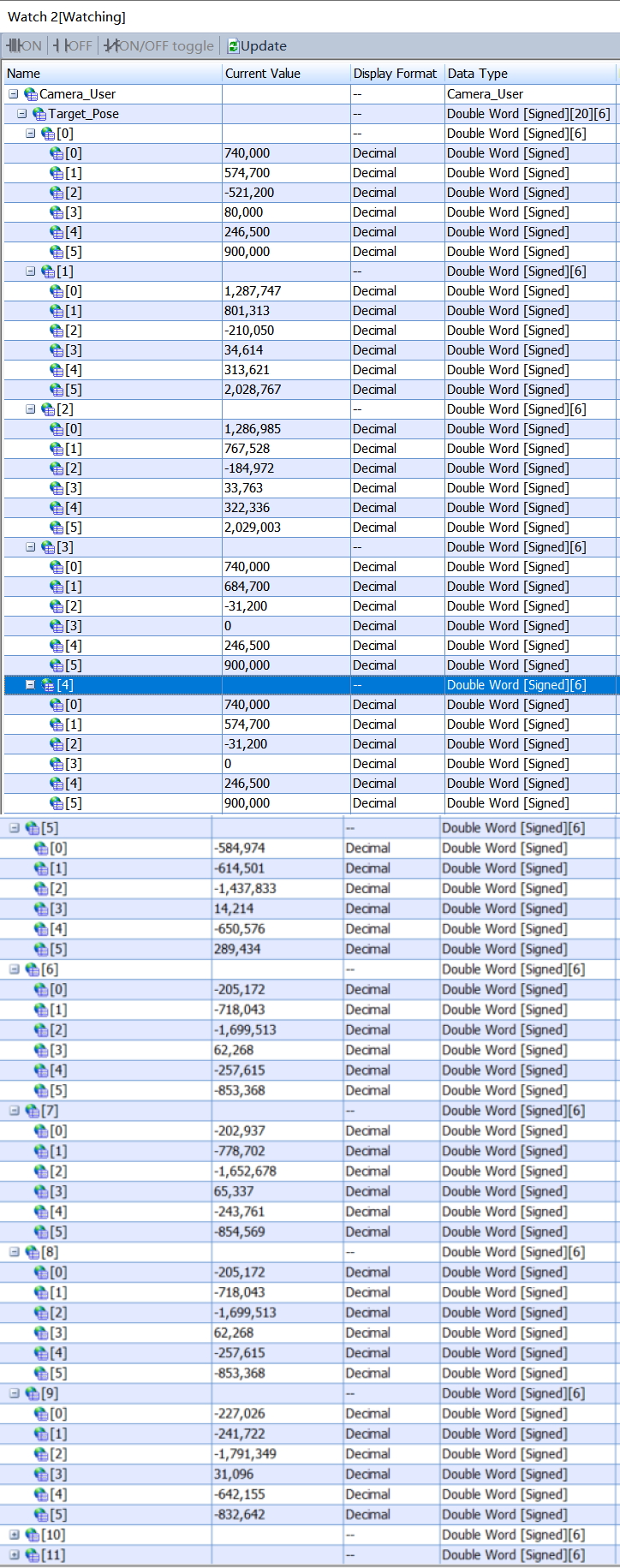
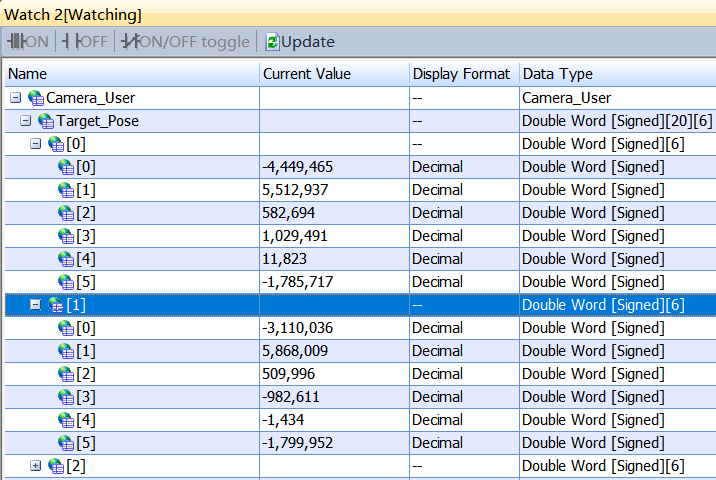
Target_Pose의 반환 값을 확인합니다.
-
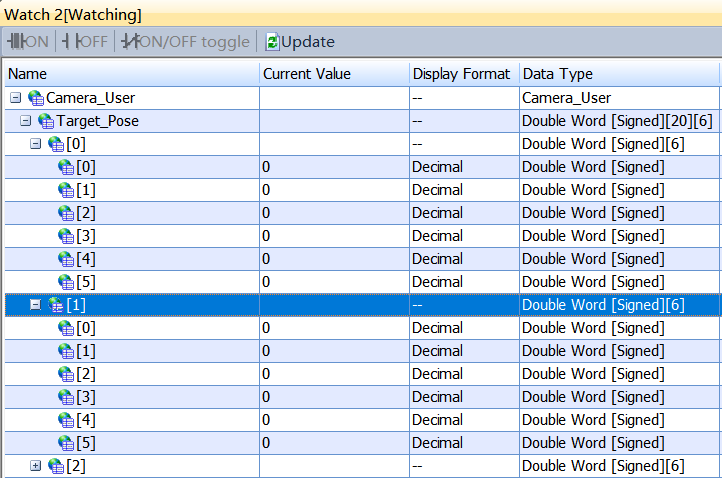
메뉴 바의 menu:Online [Watch> Register to Watch Window> Watch Window 2] 를 클릭합니다.
-
Watch 2 창의 이름 열에서 Camera_User 레이블을 찾습니다.
-
레이블 레벨을 확장하여 Target\_Pose의 반환 값을 확인합니다. 그림은 이 예시에서 비전 소프트웨어가 전송한 2세트의 포즈 데이터를 보여줍니다. (값은 실제 값에 10000을 곱한 값입니다)
-
Mech-Viz에서 계획 경로를 획득하기
파라미터를 설정하기
-
GX Works3 창에서 "MM_Get_VisData" 입력 측의 "Camera_User.Start_Empty" 레이블을 오른쪽 마우스 버튼으로 클릭하고 순서대로 menu:Debug [Modify Value ]를 클릭합니다. 마지막으로 획득한 비전 결과를 지우도록 값을 1로 수정한 다음 값을 0으로 재설정합니다.
Watch Window 2에서 비전 결과를 지운 후 Target_Pose 값을 확인합니다.
-
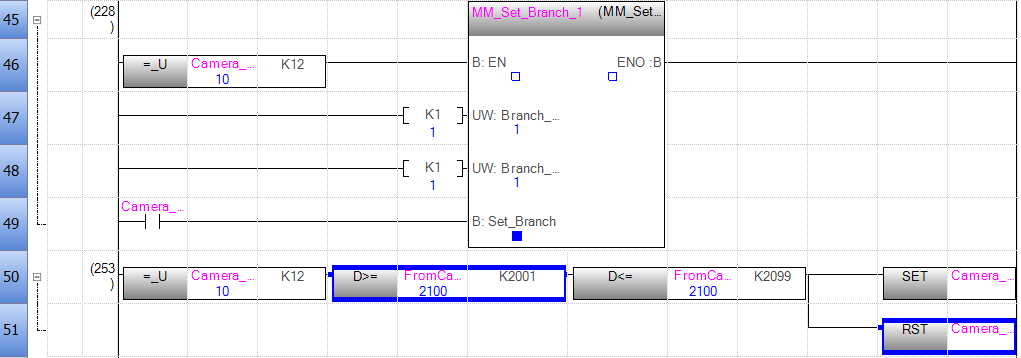
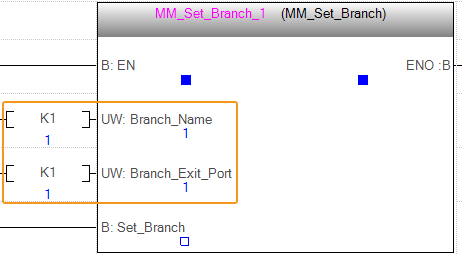
MM_Set_Branch 기능 블록을 클릭하여 다음과 같이 포트 값을 설정합니다.
-
Branch_Name의 포트 값을 1 로 설정하면 분기 번호가 1임을 의미합니다.
-
Branch_Exit_Port의 포트 값을 1 로 설정하면, Mech-Viz 프로젝트가 분기 1에 도달할 때 아웃 포트 1을 따라 계속 실행됨을 의미합니다.
-
-
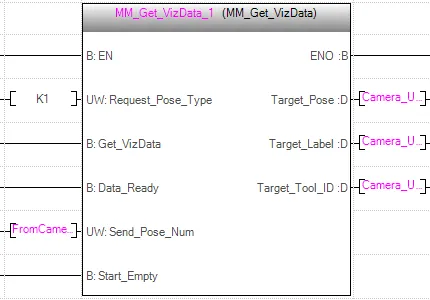
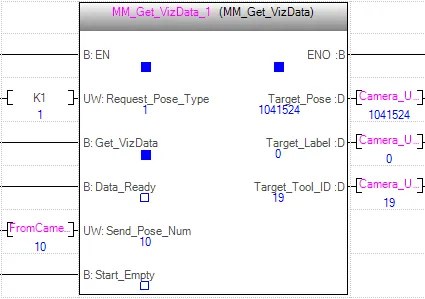
MM_Get_VizData를 클릭하여 Request_Pose_Type 포트 값을 1 로 설정하면 Mech-Viz가 반환한 데이터는 관절 각도 유형임을 의미합니다.
Mech-Viz 프로젝트 실행을 트리거하기
-
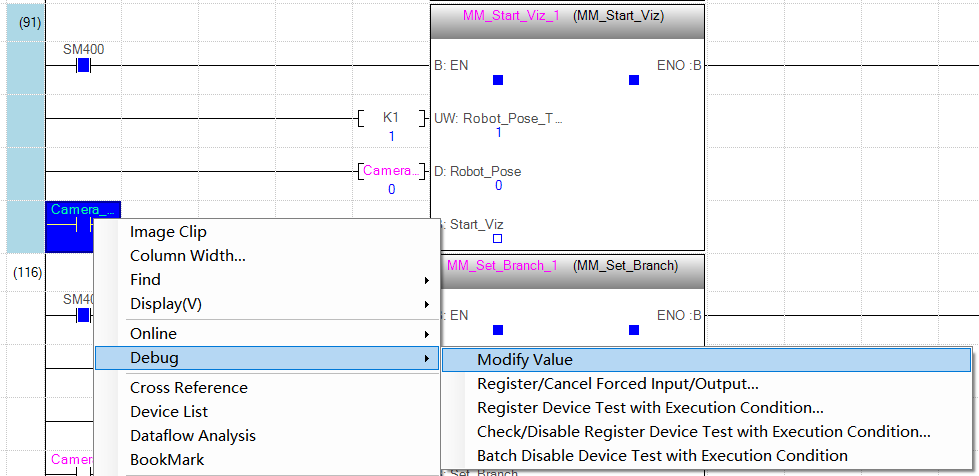
GX Works3 창에서 "MM_Start_Viz" 입력 측의 "Camera_User.Start_Viz" 레이블을 오른쪽 마우스 버튼으로 클릭하고 순서대로 를 클릭합니다. Mech-Viz 프로젝트가 실행되도록 값을 1로 수정한 다음 값을 0으로 재설정합니다.
-
Watch Window 1에서 STATUS_CODE 반환 값을 확인합니다.
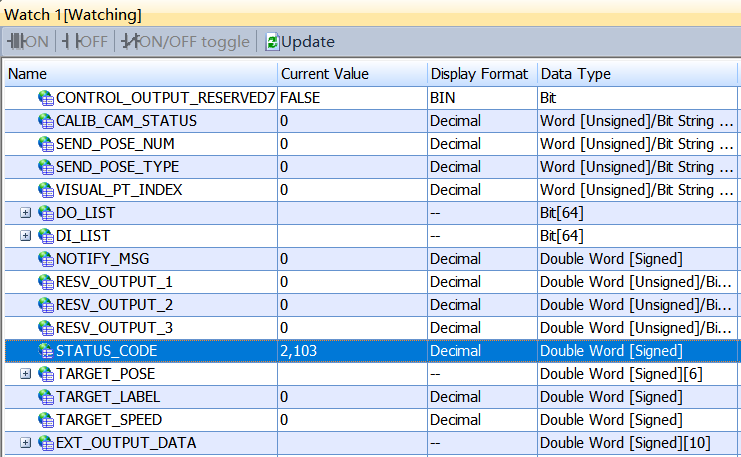
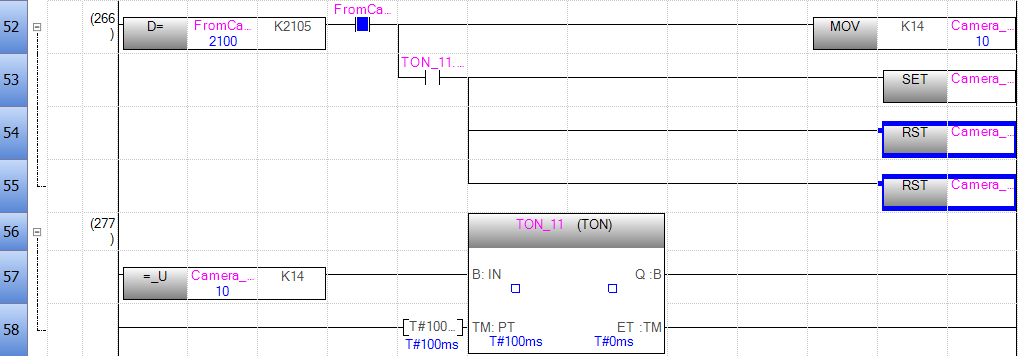
| 반환 값이 2103 인 경우 Mech-Viz 프로젝트를 성공적으로 트리거함을 의미합니다. 반환 값이 20XX인 경우 표준 인터페이스 상태 코드 및 오류 분석 내용을 참조하여 문제를 해결하십시오. |
Mech-Viz 분기 아웃 포트를 설정하기
-
GX Works3 창에서 "MM_Set_Branch" 입력 측의 "Camera_User.Set_Branch" 레이블을 오른쪽 마우스 버튼으로 클릭하고 순서대로 를 클릭합니다. Mech-Viz 분기 아웃 포트를 실행하도록 값을 1로 수정한 다음 값을 0으로 재설정합니다.
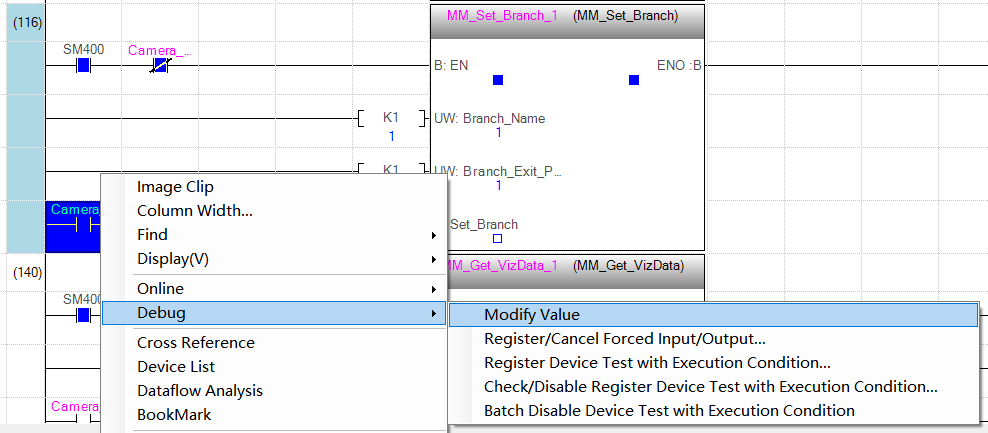
-
Watch Window 1에서 STATUS_CODE 반환 값을 확인합니다.
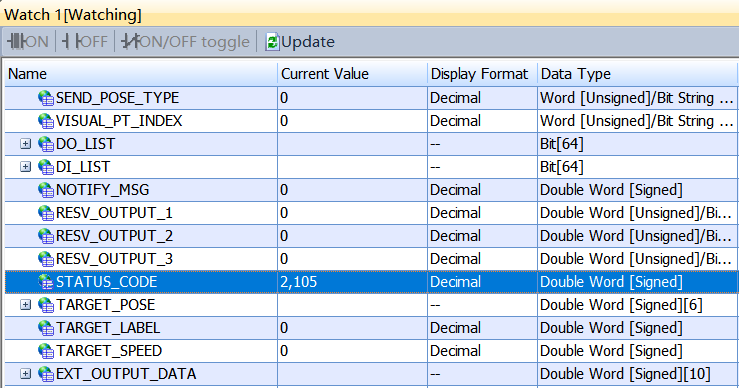
반환 값이 2105 인 경우 분기를 성공적으로 설정함을 의미합니다. 반환 값이 20XX인 경우 표준 인터페이스 상태 코드 및 오류 분석 내용을 참조하여 문제를 해결하십시오.
Mech-Viz에서 계획된 경로를 획득하기
-
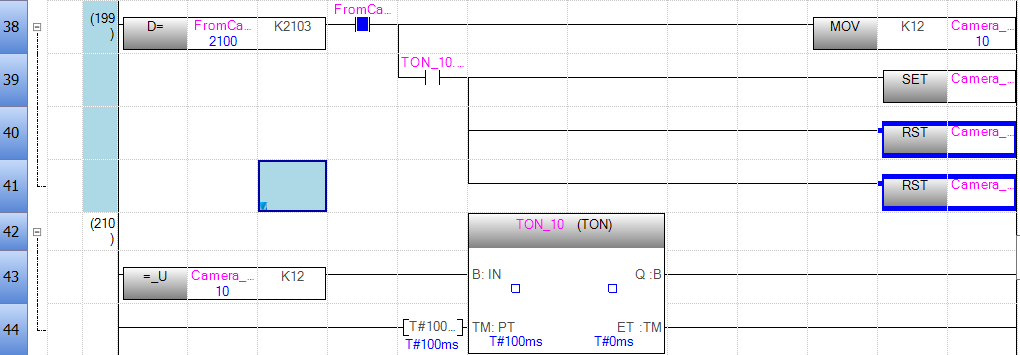
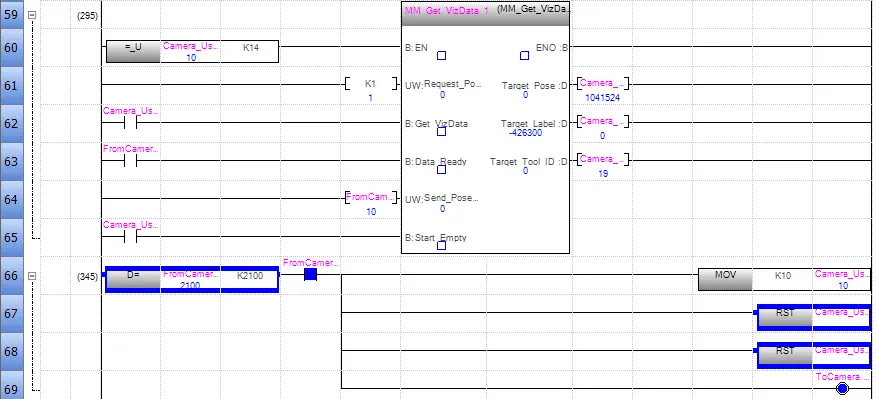
GX Works3 창에서 "MM_Get_VizData" 입력 측의 "Camera_User.Get_VizData" 레이블을 오른쪽 마우스 버튼으로 클릭하고 순서대로 menu:Debug [Modify Value ]를 클릭합니다. Mech-Viz가 계획한 경로를 획득하도록 값을 1로 수정한 다음 값을 0으로 재설정합니다.
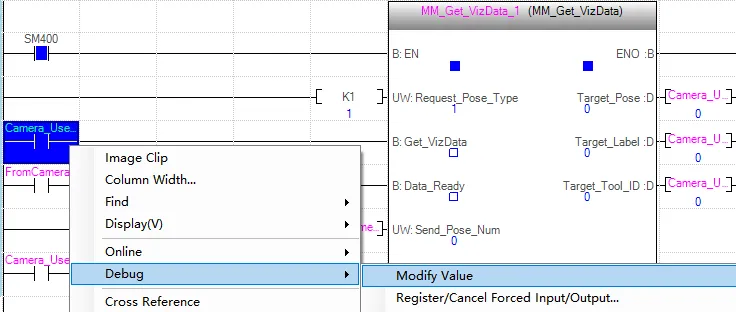
-
Watch Window 1에서 STATUS_CODE 반환 값을 확인합니다.
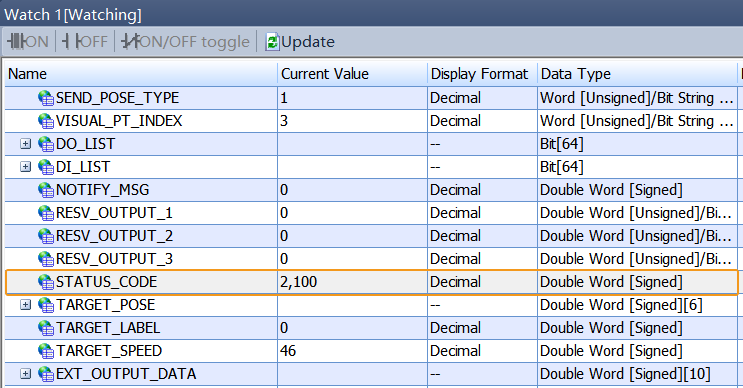
반환 값이 2100 인 경우 성공적으로 계획 경로를 획득함을 의미합니다. 반환 값이 20XX인 경우 표준 인터페이스 상태 코드 및 오류 분석 내용을 참조하여 문제를 해결하십시오. -
MM_Get_VizData를 클릭하고 Send_Pose_Num 값이 10인 것을 확인합니다. 이는 이 샘플 프로그램이 10세트의 관절 각도 데이터를 가져온다는 것을 의미합니다.
-
Watch Window 2에서 Target_Pose 값을 확인합니다.(값은 실제 값에 10000을 곱한 값입니다.)