샘플 프로그램6: MM_S6_Vis_Timer
프로그램 소개
기능 설명 |
PLC가 비전 사이클 타임을 계산합니다. 즉, 트리거부터 Mech-Vision 프로젝트가 실행되고 마지막으로 비전 결과를 획득하기까지 소요되는 시간입니다. |
파일 경로 |
Mech-Vision 및 Mech-Viz 소프트웨어 설치 디렉토리의 |
필요한 프로젝트 |
Mech-Vision 프로젝트 |
사용 조건 |
|
| 이 샘플 프로그램은 참고용으로 제공됩니다. 사용자는 실제 상황에 맞춰 이 내용을 바탕으로 수정해야 하며, 해당 프로그램을 그대로 사용하지 않도록 하십시오. |
프로그램 설명
다음에는 MM_S6_Vis_Timer 샘플 프로그램과 관련 설명입니다.
| 사이클 타임MM_S1_Vis_Basic 샘플과 비하면, 이 샘플은 비전 사이클 타임을 계산할 수 있는 기능을 추가되었습니다.(Rung 7~9). 따라서, MM_S4_Vis_SwitchRecipe MM_S1_Vis_Basic과 일치하는 부분은 다시 설명하지 않습니다. (일치하는 부분에 대한 정보는 MM_S1_Vis_Basic 샘플 프로그램 설명을 참조하십시오). |







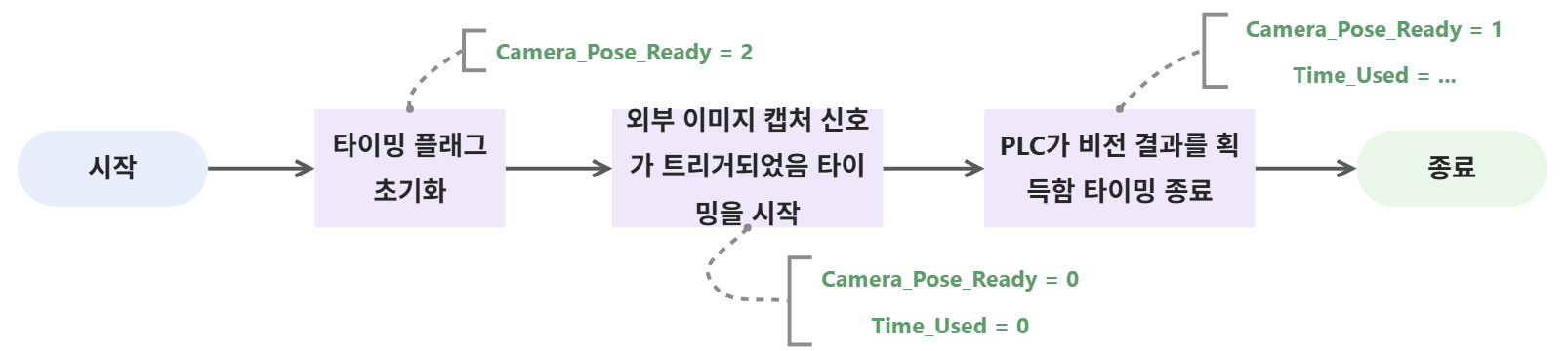
위 샘플 프로그램에서 비전 사이클 타임을 계산하기 해당하는 워크플로는 아래 그림에 표시되어 있습니다.
아래 표는 비전 사이클 타임을 계산하는 기능에 대해 설명합니다.
|
AB PLC에 내장된 자주 사용하는 기본 명령어는 자주 사용하는 명령어 설명을 참고하십시오. |
| 워크플로 | 설명 |
|---|---|
비전 사이클 타임을 계산하기 |
Rung 7 및 8은 지연 타이머(‘pulse_10ms_1’과 ‘pulse_10ms_2’)는 두 개의 TON을 사용하여 연결되며, 10ms 펄스 폭(pulse_10ms_1.DN)을 생성함을 나타냅니다. 따라서 pulse_10ms_1.DN의 상승 에지 주기는 10×2=20ms입니다.
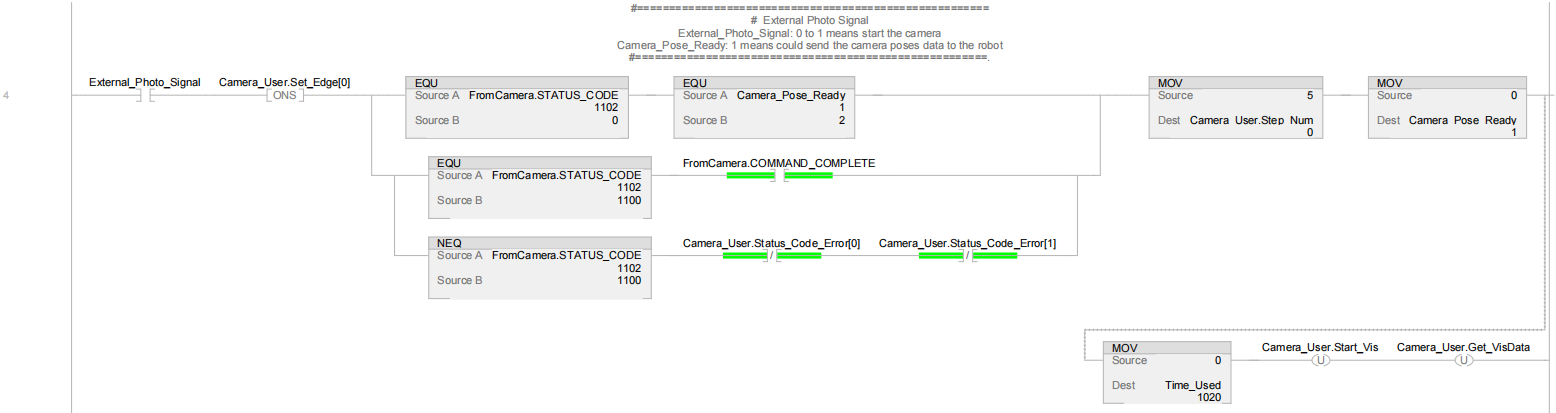
Rung 9: Camera_Pose_Ready가 0(외부 이미지 캡처 신호가 트리거됨)에서 1(PLC가 비전 결과를 획득함)로 변경되는 데 걸리는 시간(즉, 비전 사이클 타임)은 Time_Used 값을 기준으로 20ms 단위로 계산됩니다. |