자동 캘리브레이션
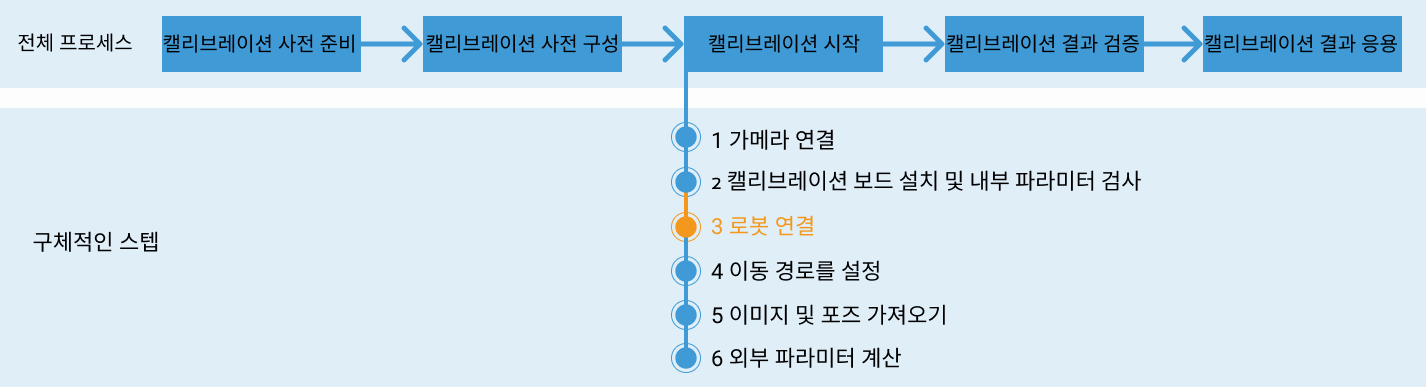
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고사항
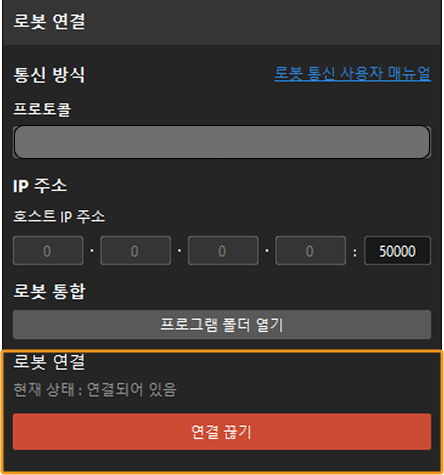
캘리브레이션을 실행할 때 "로봇을 연결하기" 스텝에서 Mech-Vision 소프트웨어 화면에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 스텝을 진행하십시오.
|
1. 캘리브레이션 프로그램을 로드하기
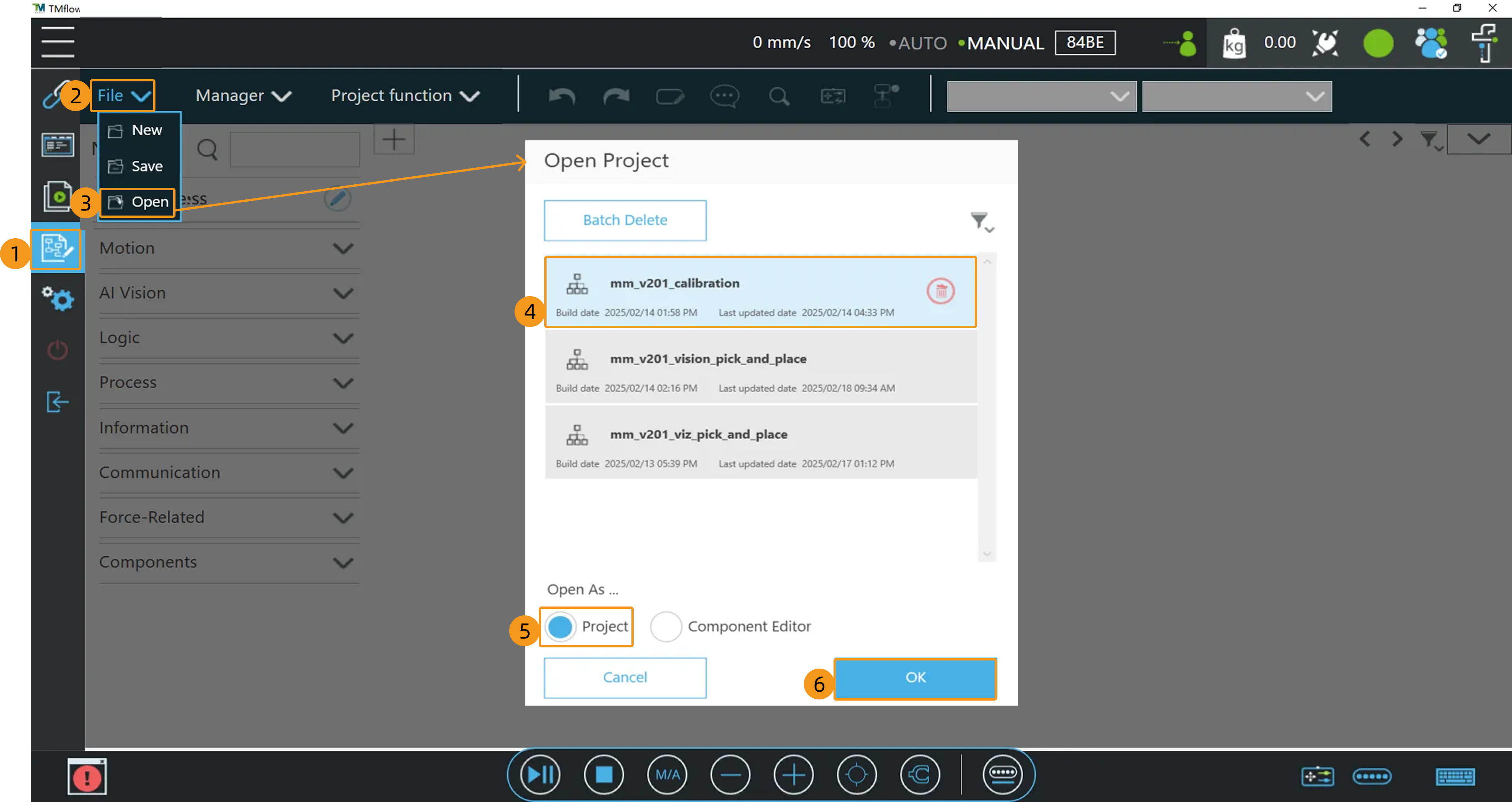
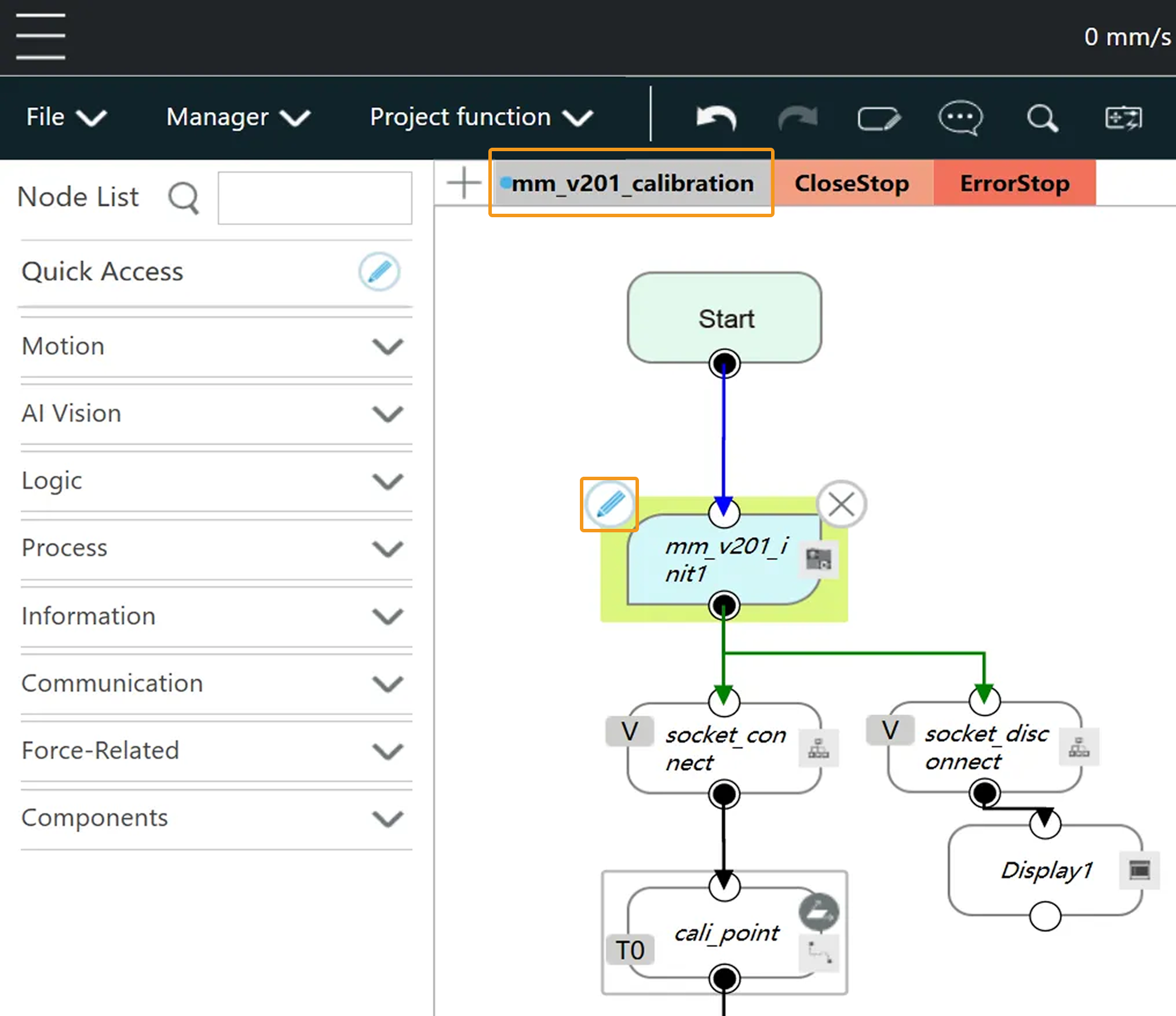
수동 모드(Manual 램프 상시 점등)에서 TMflow 소프트웨어를 켠 후 아래 그림 표시에 따라 mm_v201_calibration 프로젝트를 열어주십시오.
2. 캘리브레이션 시작점 설정하기
-
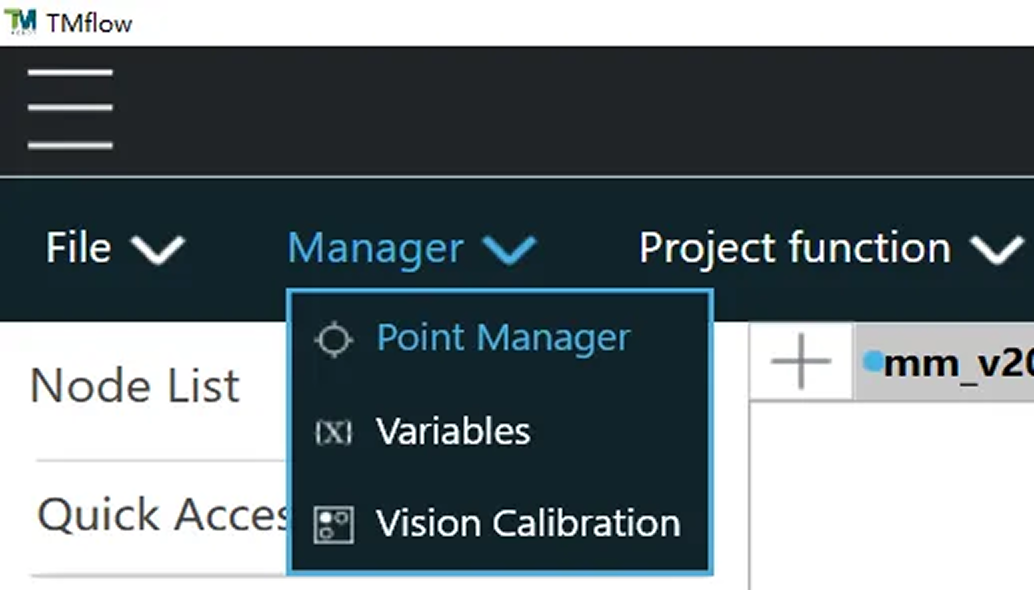
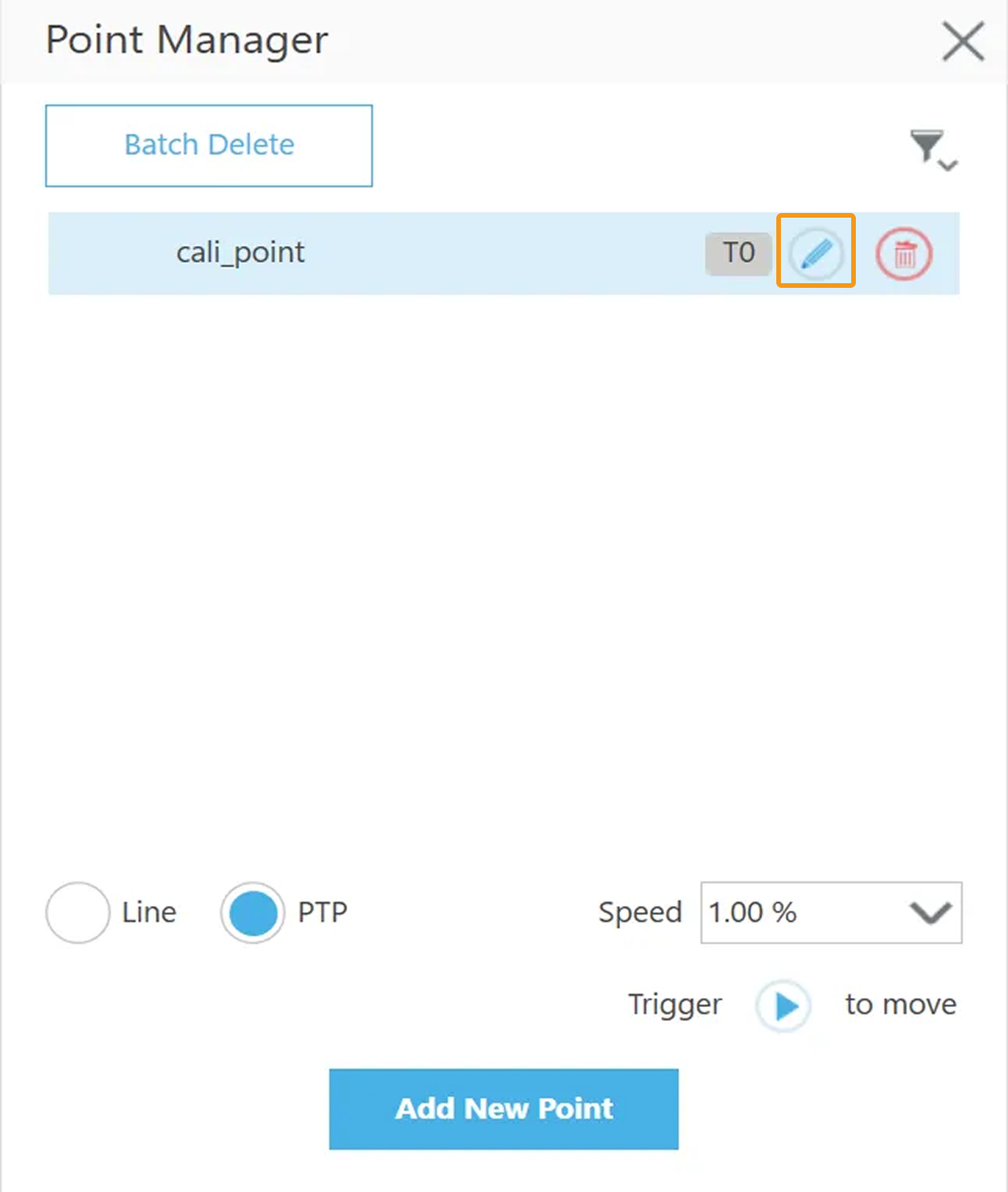
차례로 버튼을 클릭하십시오.
-
팝업된 창에서 편집 버튼을 클릭하십시오.
-
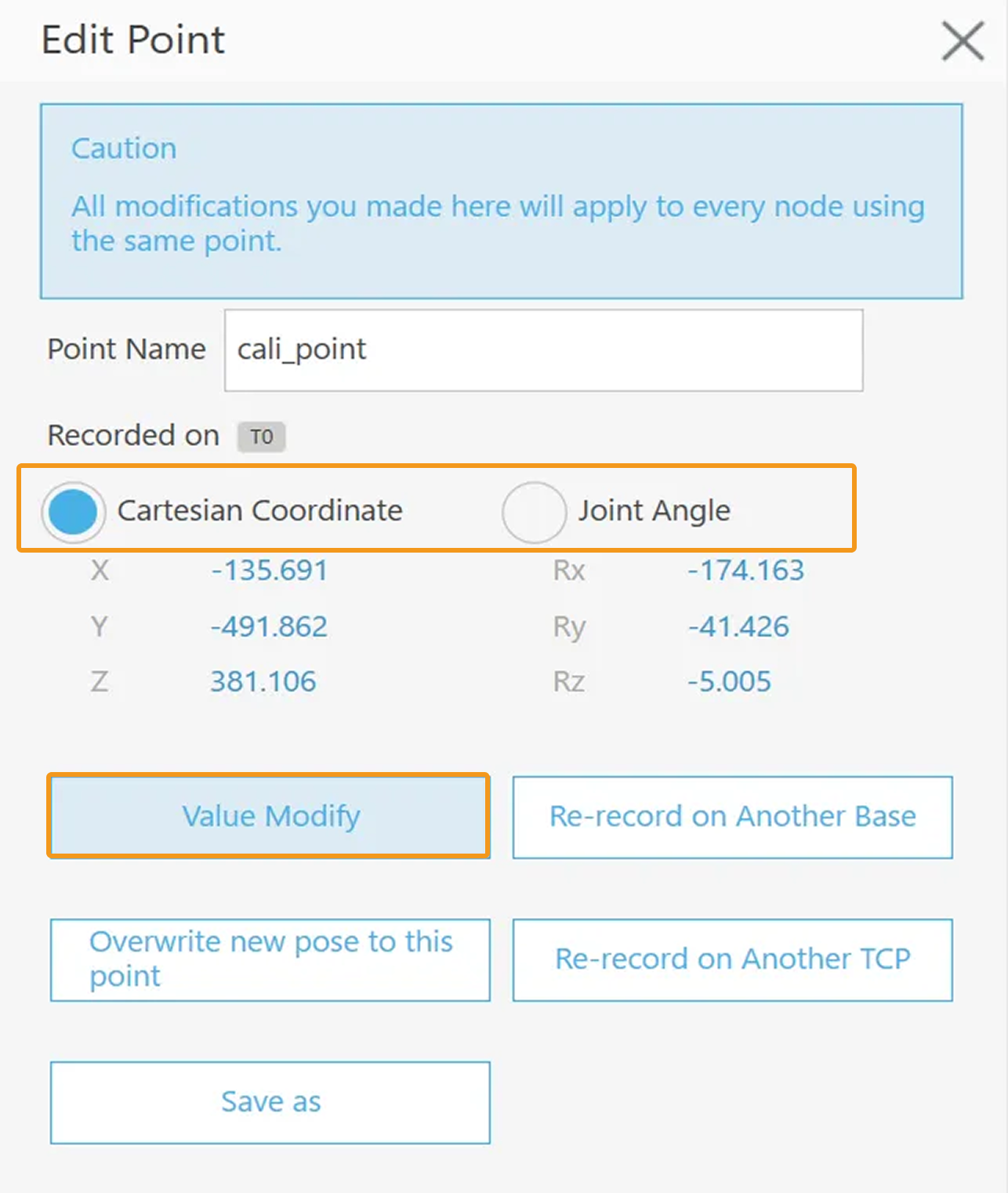
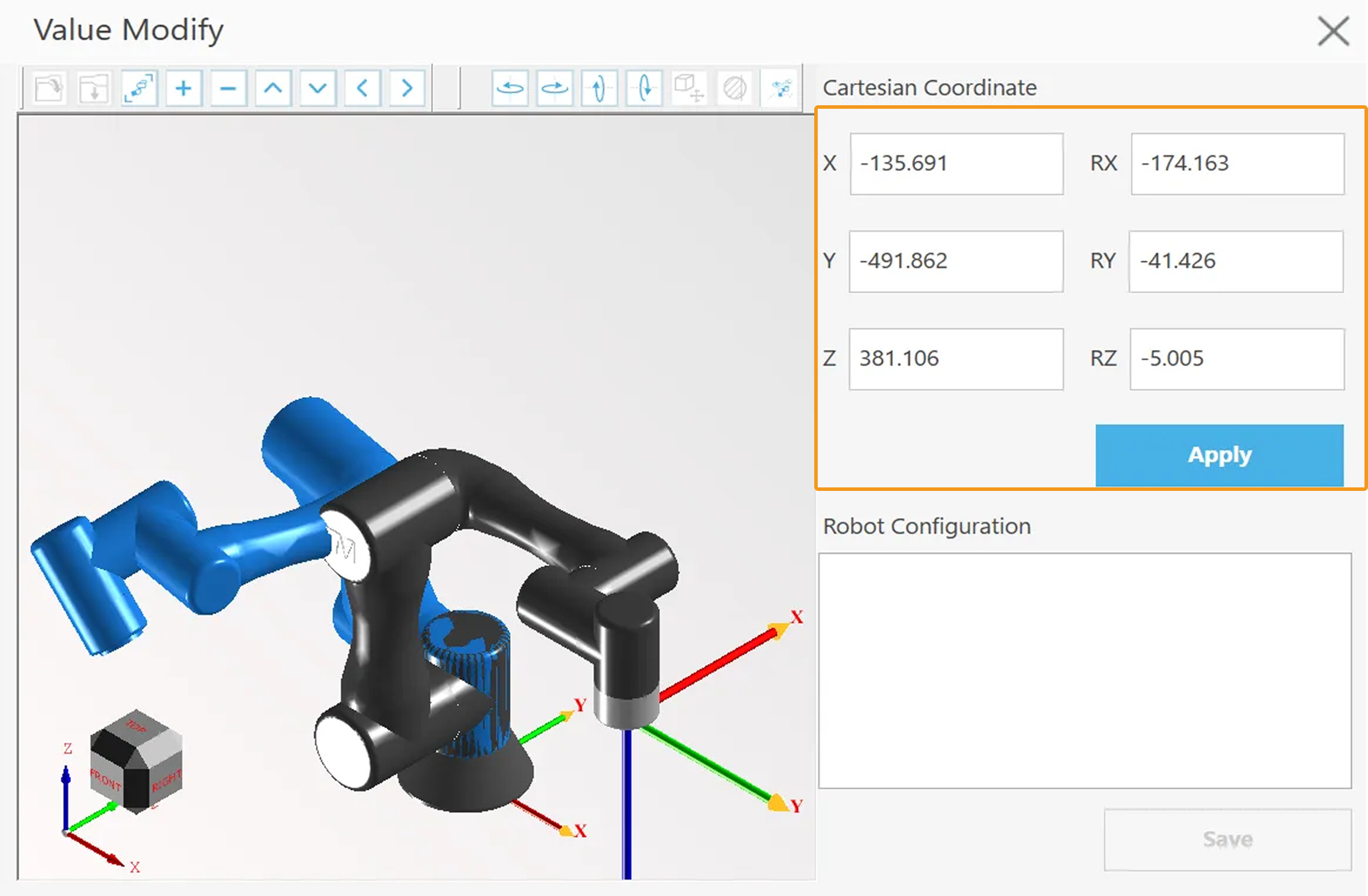
편집 지점 인터페이스에서 Cartesian Coordinate혹은 Joint Angle(그림 중 Cartesian Coordinate를 예로 들어 봄)선택하고 Value Modify버튼을 클릭하면 cali_point의 포즈(이 포즈는 자동 캘리브레이션의 시작점 포즈임)를 편집할 수 있습니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.
-
편집 완료 후 Apply 버튼을 클릭하십시오.
3. 캘리브레이션 프로그램을 수정하기
-
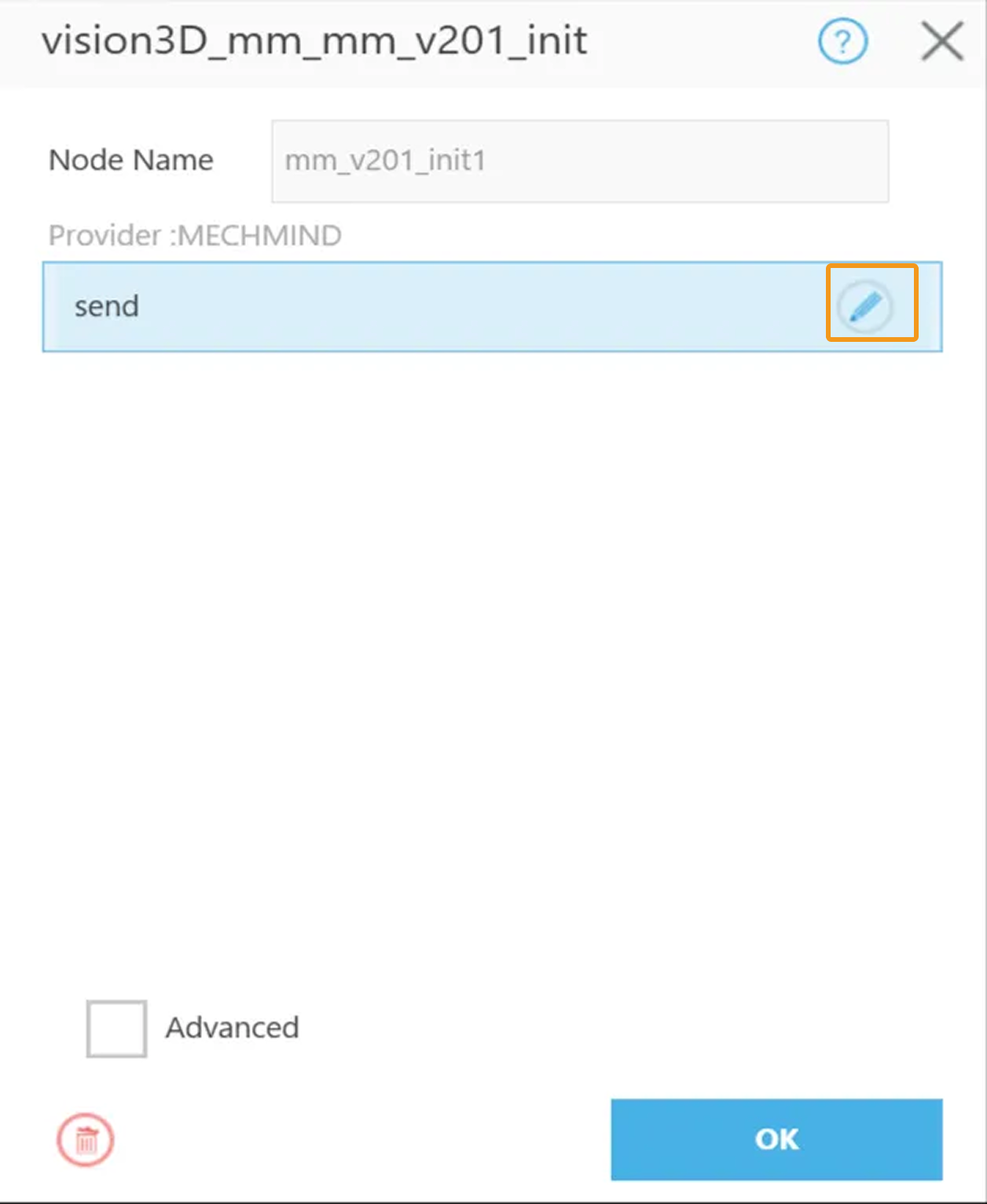
mm_v201_calibration프로그램 인터페이스에서 mm_v201_init1좌측 상단의 폅집 아이콘을 클릭하십시오.
-
send를 선택한 다음 편집 아이콘을 클릭하십시오.
-
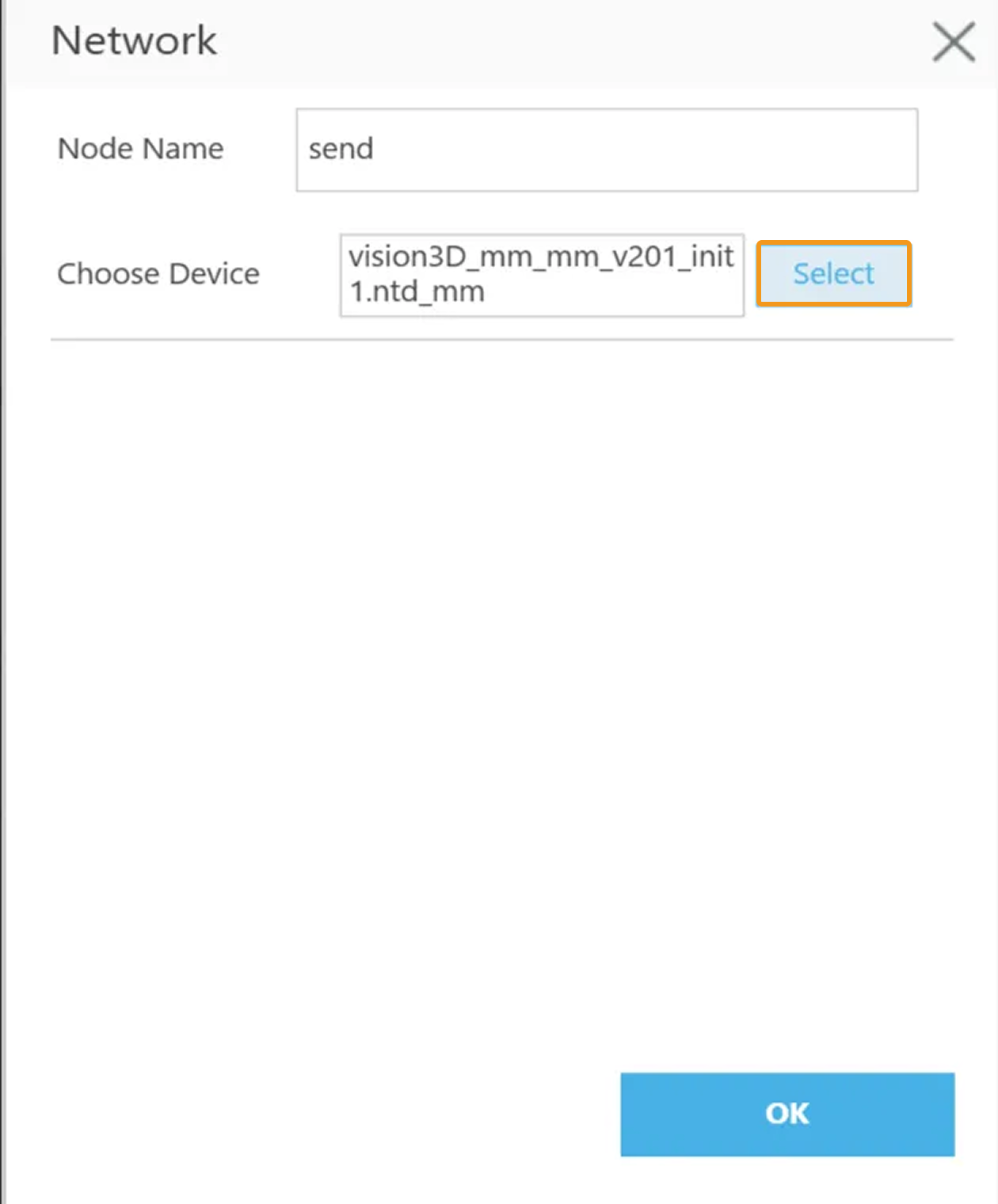
Select 버튼을 클릭하십시오.
-
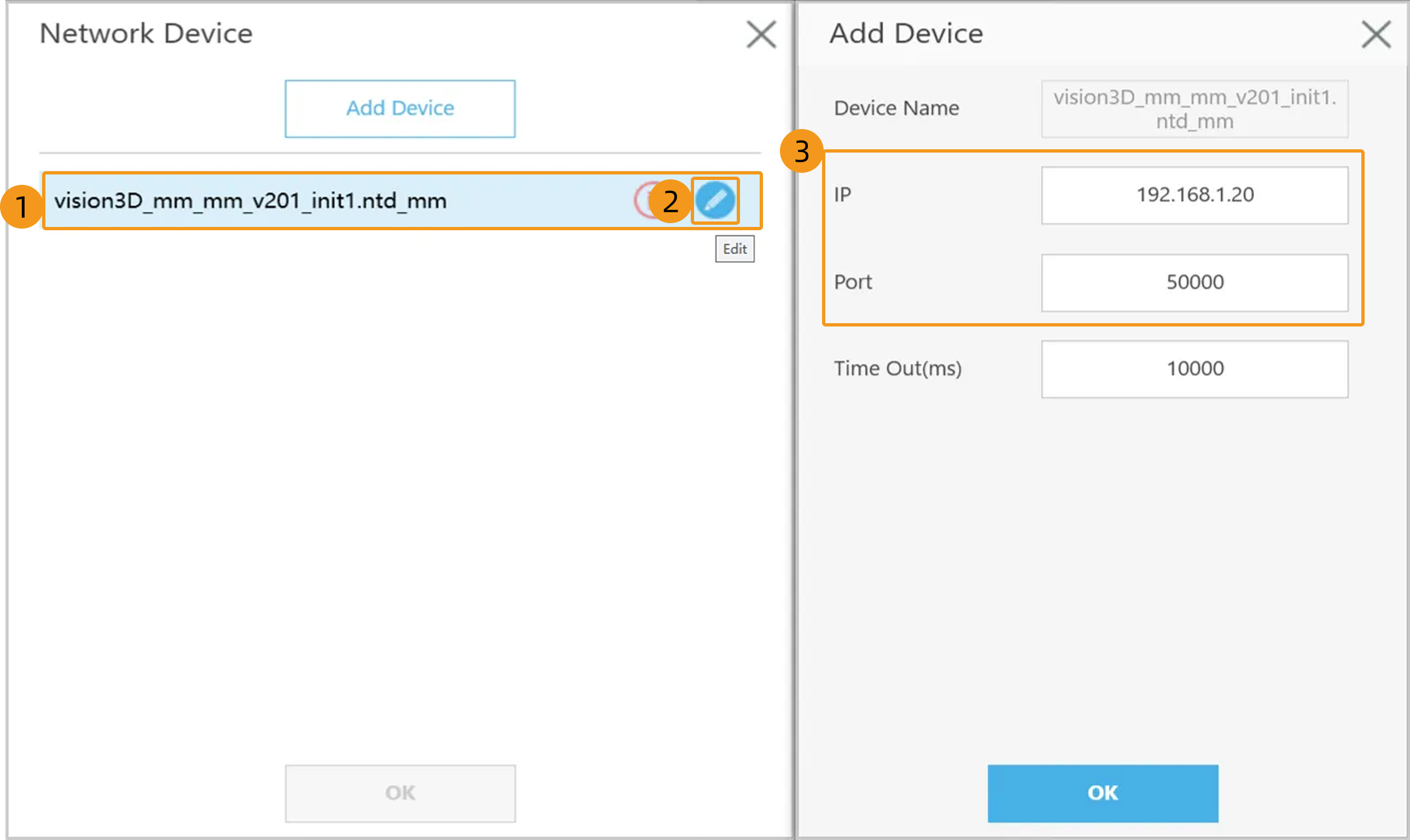
우측 상단의 추가 아이콘을 클릭하십시오.

-
먼저vision3D_mm_mm_v201_init1.ntd_mm저 선택한 다음 편집 아이콘을 클릭하고 팝업창에 IP와Port를 입력하십시오. 마지막으로 열린 창에서 한나씩OK 버튼을 클릭하십시오.
-
IP에는 IPC의 IP 주소를 입력해야 합니다.
-
Port에는Mech-Vision에서 설정된 호스트 포트 번호를 입력해야 합니다.
-