JAKA 피킹 샘플 프로그램
이 부분에서는 간단한 인식과 이동을 완성하는 로봇 샘플 프로그램을 소개합니다.
샘플 프로그램 설명
로봇이 간단한 피킹과 배치의 샘플 프로그램은 이미 《JAKA 표준 인터페이스 통신 구성》 챕터에서 도입했습니다.
세 가지 샘플 프로그램은 다음과 같습니다.
Mech-Vision을 통해 비전 인식을 실행하여 비전 결과를 획득하기
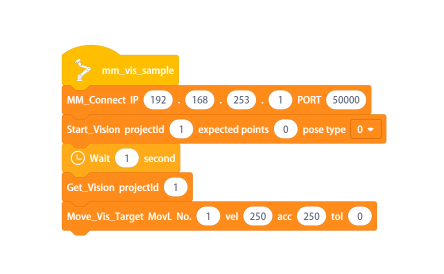
프로그래밍 제어 화면에서 아래 그림과 같은 명령어를 드래그하거나, 복제된 mm_vis_sample 프로그램을 실행하십시오.
프로그램 설명
-
프로그램 이름은 mm_vis_sample 입니다.
-
로봇과 IPC를 연결하려면 사용자는 IPC의 IP와 포트 번호를 설정해야 하며, 자세한 내용은 MM_Connect 명령어를 참고하십시오.
-
Mech-Vision 프로젝트를 실행하려면 사용자는 Mech-Vision 프로젝트 번호와 원하는 포즈 개수 또한 로봇이 Mech-Vision에게 전송하는 포즈 유형을 설정해야 하며, 자세한 내용은 Start_Vision 명령어를 참고하십시오.
-
로봇이 흔들림 인해 사진 촬영에 영향을 미치는 것을 방지하기 위해 1초 동안 기다려 주십시오.
-
Mech-Vision 프로젝트 출력한 비전 결과를 수신하려면 사용자는 Mech-Vision 프로젝트 번호를 설정해야 하며, 자세한 내용은 Get_Vision 명령어를 참고하십시오.
-
로봇을 Mech-Vision에서 출력한 비전 포인트로 이동시킵니다. 사용자는 특정 포인트로 이동, 이동 속도, 이동 가속도 및 종착점 오차등 설정할 수 있으며, 자세한 내용은 Move_Vis_Target 명령어를 참고하십시오.
Mech-Viz를 사용하여 경로를 계획하기
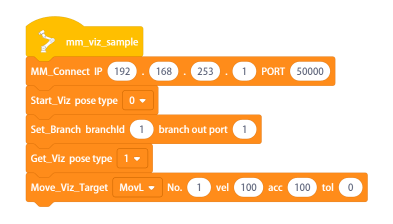
프로그래밍 제어 화면에서 아래 그림과 같은 명령어를 드래그하거나, 복제된 mm_viz_sample 프로그램을 실행하십시오.
프로그램 설명
-
프로그램 이름은 mm_viz_sample 입니다.
-
로봇과 IPC를 연결하려면 사용자는 IPC의 IP와 포트 번호를 설정해야 하며, 자세한 내용은 MM_Connect 명령어를 참고하십시오.
-
Mech-Viz 프로젝트를 실행하려면 사용자가 Mech-Viz로 입력한 로봇의 포즈 유형을 설정해야 하며, 자세한 내용은 Start_Viz 명령어를 참고하십시오.
-
분기 설정하려면 사용자는 분기의 스텝 이름과 아웃 포트 번호를 설정해야 하며, 자세한 내용은 Set_Branch 명령어를 참고하십시오.
-
Mech-Viz 프로젝트 출력한 데이터를 수신하려면 사용자는 반환 웨이포인트의 형식을 설정해야 하며, 자세한 내용은 Get_Viz 명령어를 참고하십시오.
-
로봇을 Mech-Viz 계획된 웨이포인트로 이동시킵니다. 사용자는 특정 포인트로 이동, 이동 속도, 이동 가속도 및 종착점 오차등 설정할 수 있으며, 자세한 내용은 Move_Viz_Target 명령어를 참고하십시오.
Mech-Vision "경로 계획" 스텝을 사용하여 계획된 경로를 획득하기
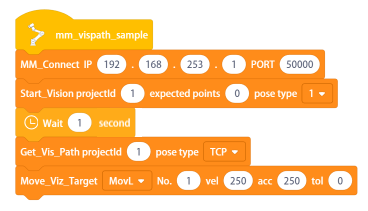
프로그래밍 제어 화면에서 아래 그림과 같은 명령어를 드래그하거나, 복제된 mm_vispath_sample 프로그램을 실행하십시오.
프로그램 설명
-
프로그램 이름은 mm_vispath_sample 입니다.
-
로봇과 IPC를 연결하려면 사용자는 IPC의 IP와 포트 번호를 설정해야 하며, 자세한 내용은 MM_Connect 명령어를 참고하십시오.
-
Mech-Vision 프로젝트를 실행하려면 사용자는 Mech-Vision 프로젝트 번호와 원하는 포즈 개수 또한 로봇이 Mech-Vision에게 전송하는 포즈 유형을 설정해야 하며, 자세한 내용은 Start_Vision 명령어를 참고하십시오.
-
로봇이 흔들림 인해 사진 촬영에 영향을 미치는 것을 방지하기 위해 1초 동안 기다려 주십시오.
-
Mech-Vision의 "경로 계획" 스텝에서 출력되는 계획 경로를 수신하려면 사용자는 Mech-Vision 프로젝트 번호와 웨이포인트의 포즈 유형을 설정해야 하며, 자세한 내용은 Get_Vis_Path 명령어를 참고하십시오.
-
로봇을 계획된 웨이포인트로 이동시킵니다. 사용자는 특정 포인트로 이동, 이동 속도, 이동 가속도 및 종착점 오차등 설정할 수 있으며, 자세한 내용은 Move_Viz_Target 명령어를 참고하십시오.