JAKA 자동 캘리브레이션
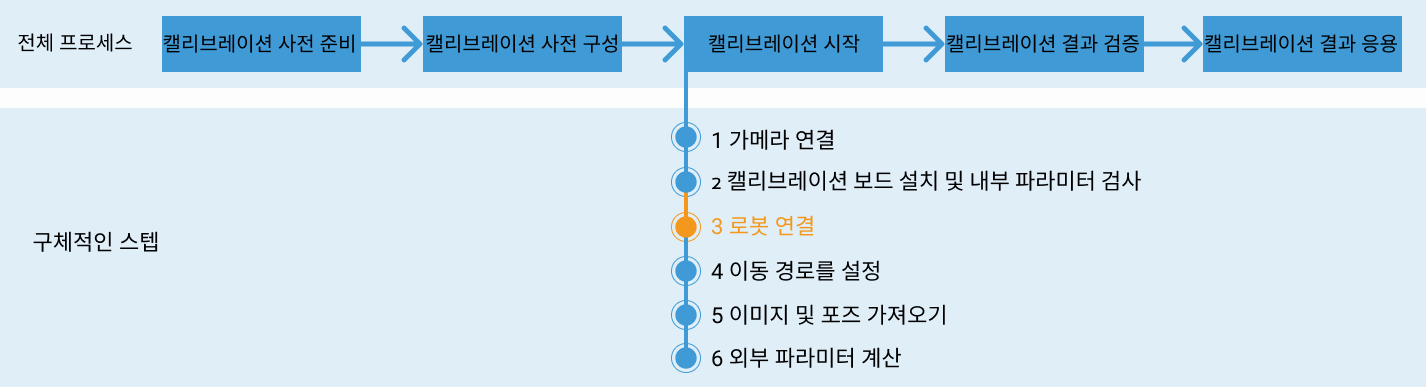
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고사항
캘리브레이션을 실행할 때 "로봇을 연결하기" 스텝에서 Mech-Vision 소프트웨어 화면에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 스텝을 진행하십시오.
|
-
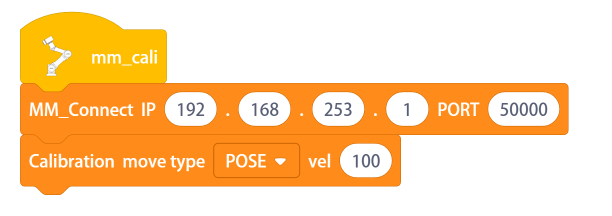
프로그래밍 제어 화면에서 아래 그림과 같은 두 개의 명령어를 드래그하거나, 복제된 mm_cali 프로그램을 실행하십시오.
MM_Connect 명령에서 IP파라미터 값은 IPC의 IP 주소로 설정해야 하며 PORT 파라미터 값은 Mech-Vision에서 설정된 호스트 포트 번호와 일치해야 합니다.
-
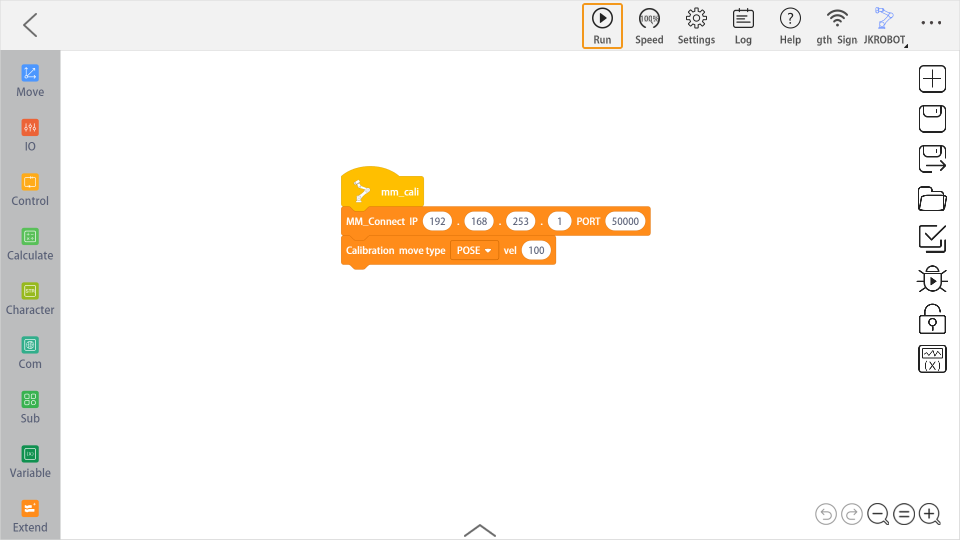
왼쪽 상단의 Run 버튼을 클릭하십시오.
-
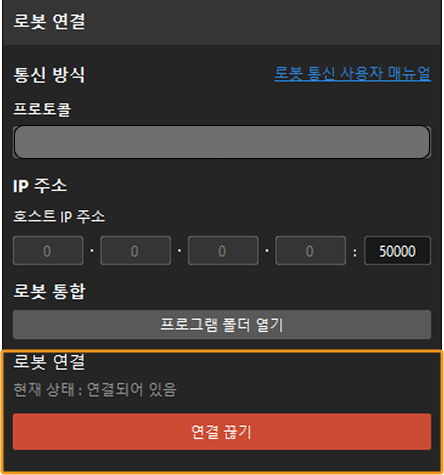
Mech-Vision의 캘리브레이션 창을 확인하고 로봇 연결 영역에 "연결됨" 상태 정보가 표시된 후 버튼이 로봇이 연결되기를 기다리는 중...에서 연결 끊기로 변경된 후 하단 바에서다음 버튼을 클릭합니다.
-
아래 링크를 각각 참고하여 캘리브레이션 시작 중 네 번째 스텝(이동 경로 설정)과 후속 워크플로를 실행하십시오.