JAKA 사전 설치된 프로그램으로 표준 인터페이스 구현
이 부분에서는 JAKA 사전 절치된 프로그램 플러그인을 이용한 표준 인터페이스 프로그램 작성 방법을 소개합니다. 사용자는 이 문서의 샘플 프로그램에 간단한 수정만 하면 사용할 수 있습니다. 이 부분에서 다루는 샘플 프로그램은 로봇 컨트롤러 버전에 대한 요구 사항이 없습니다.
샘플 프로그램 플래싱하기
-
Mech-Vision 와 Mech-Viz 소프트웨어 설치 디렉터리 아래의
통신 구성 요소\Robot_Interface\JAKA폴더를 열고mmCali.zip、mmVis.zip、mmVisPath.zip、mmViz.zip파일을 JAKA Zu APP이 설치된 기계에 복사하십시오. 후속 작업은 여기에서 복사한 네 개 파일을 도입해야 합니다. -
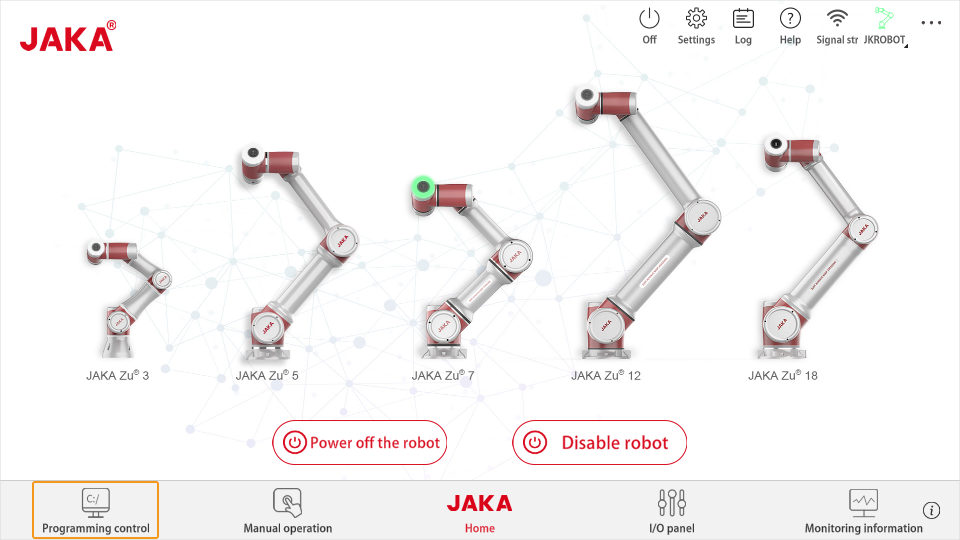
JAKA 메인 화면으로 들어가 왼쪽 하단의 Programming control 버튼을 클릭하십시오.
-
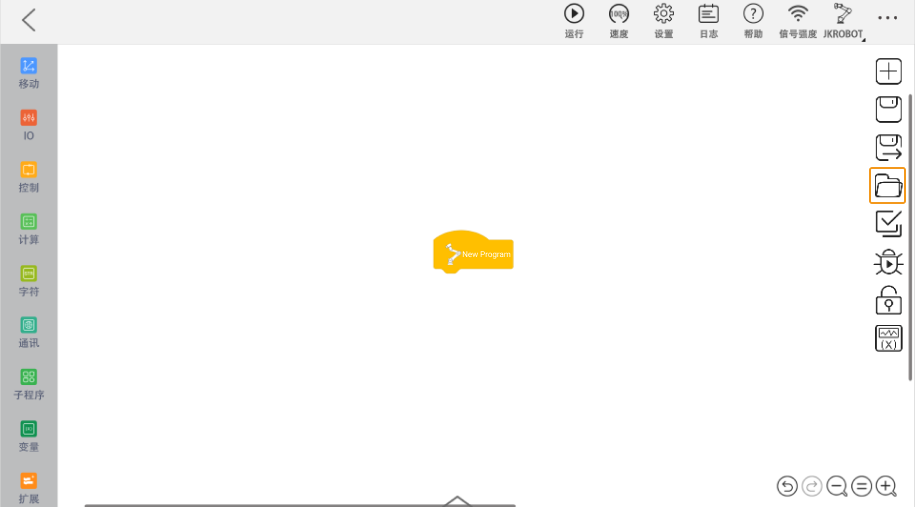
오른쪽에 있는 *폴더 아이콘*을 클릭하십시오.
-
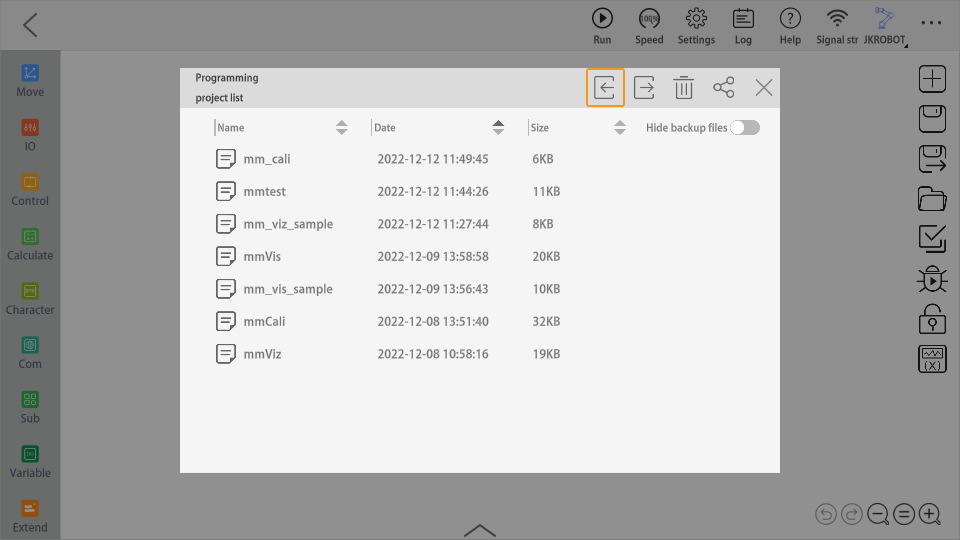
*import icon*을 클릭하십시오.
-
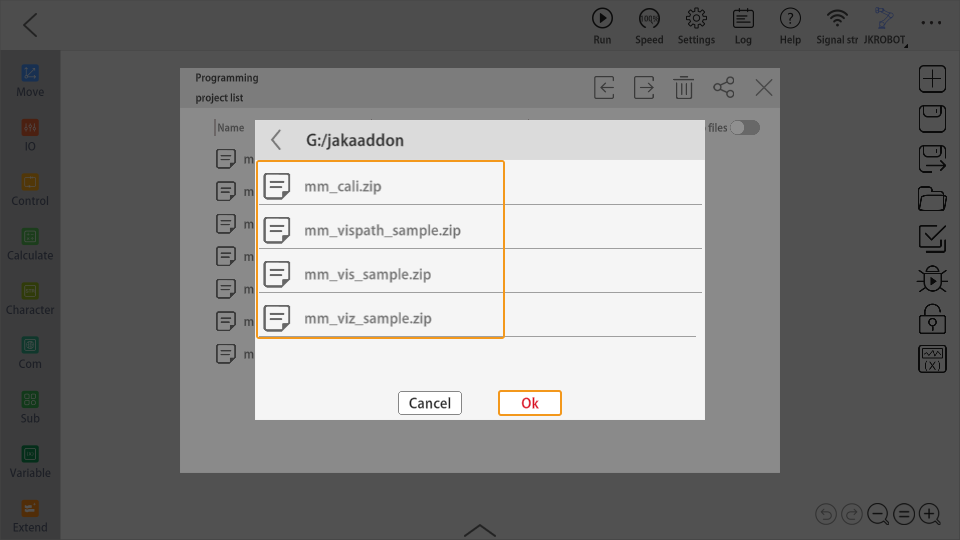
그림에 표시된 파일을 선택하고 OK 버튼을 클릭하십시오.
Mech-Vision을 통해 비전 인식을 실행하여 비전 결과를 획득하기
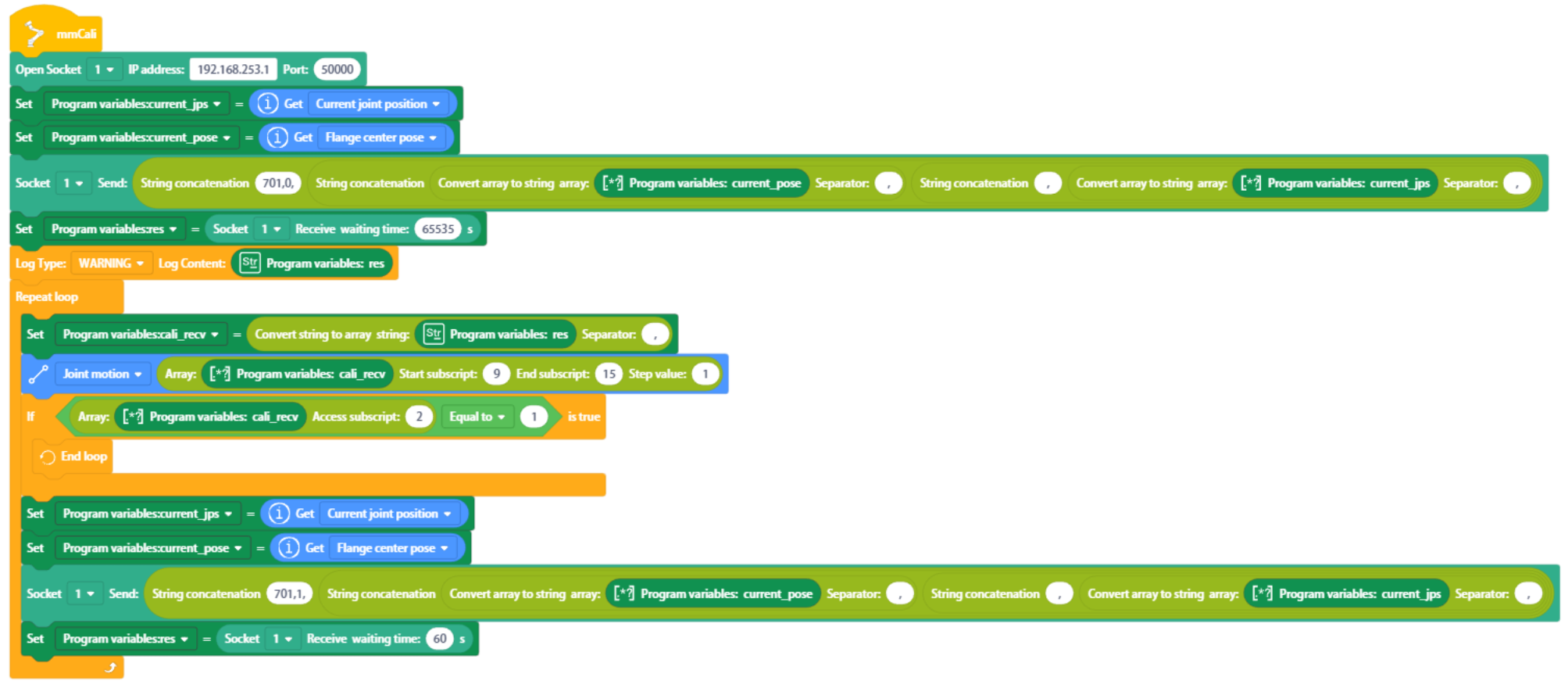
프로그래밍 제어 화면에서 mmVis 프로그램을 열어주십시오.
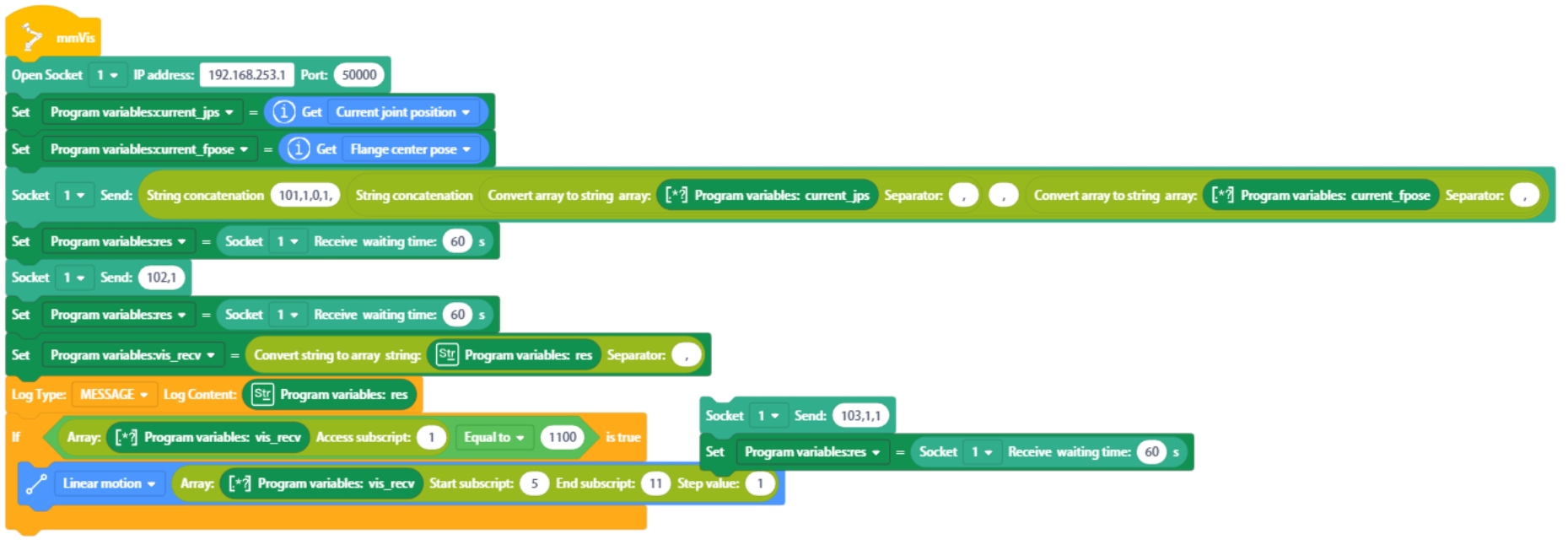
프로그램 설명
-
1 단계: 로봇과 IPC의 Socket 연결을 설정하십시오. 이 곳에 IP 주소는 IPC의 IP 주소이며 로봇IP와 동일한 네트워크 구간에 있어야 합니다.
-
2 단계: 로봇의 현재 관절 각도를 획득하고 current_jps 변수에 저장하십시오.
-
3 단계: 로봇의 현재 플랜지 포즈를 획득하고 current_fpose 변수에 저장하십시오.
-
4 단계: Mech-Vision 프로젝트 실행 명령어를 전송하십시오. 자세한 파라미터 설정은 101 명령어 참고하십시오.
-
5 단계: 101 명령어가 반환된 상태 코드를 획득하고 res 변수에 저장하십시오.
-
6 단계: 비전 결과 획득하는 명령어를 전송하십시오. 자세한 파라미터 설정은 102 명령어 참고하십시오.
-
7 단계: 102 명령어가 반환된 데이터를 획득하고 res 변수에 저장하십시오.
-
8 단계: 7 단계에서 수신한 데이터를 문자열 형식에서 배열 형식으로 변환하고 vis_recv 변수에 저장하십시오.
-
9 단계: 로그를 출력하십시오.
-
10 단계: vis_recv 시작 인덱스 1의 값이 1100인지 확인하십시오. 1100인 경우 비전 결과 획득 성공입니다.
-
11 단계: 첫 번째 비전 포인트까지 직선 운동하십시오.
JAKA 직선 운동에는 TCP 포즈 값을 전달해야 하며, 관절 운동에는 관절 값을 전달해야 합니다.
Mech-Viz를 사용하여 경로를 계획하기
프로그래밍 제어 화면에서 mmViz 프로그램을 열어주십시오.
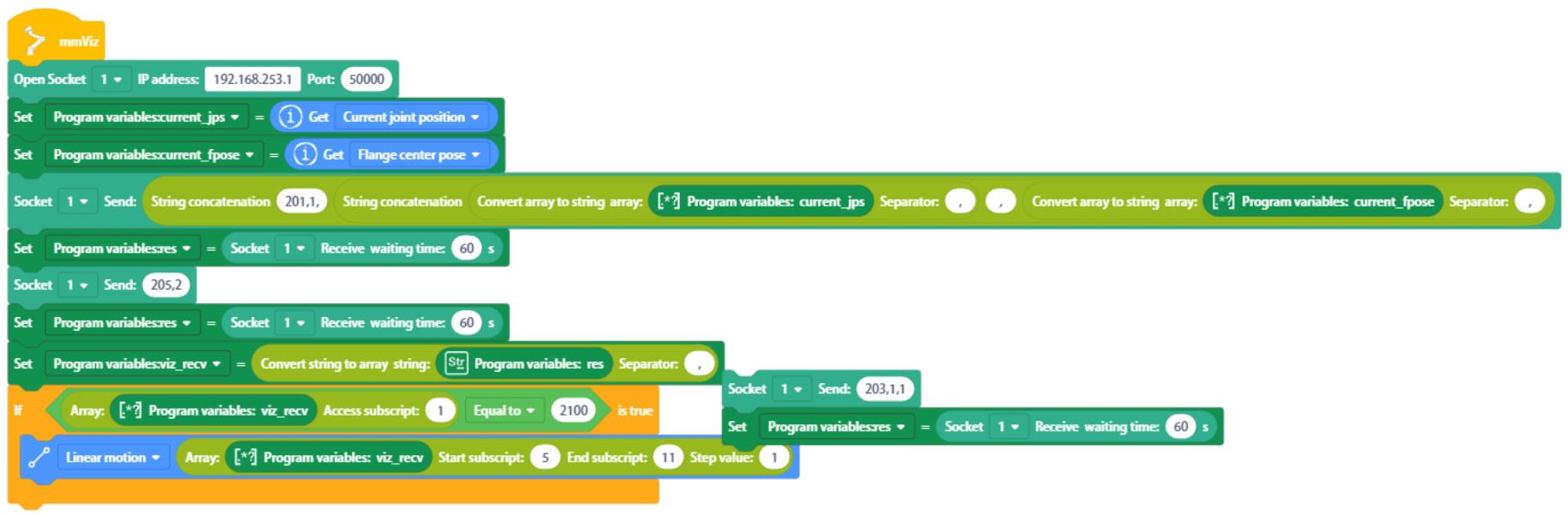
프로그램 설명
-
1 단계: 로봇과 IPC의 Socket 연결을 설정하십시오. 이 곳에 IP 주소는 IPC의 IP 주소이며 로봇IP와 동일한 네트워크 구간에 있어야 합니다.
-
2 단계: 로봇의 현재 관절 각도를 획득하고 current_jps 변수에 저장하십시오.
-
3 단계: 로봇의 현재 플랜지 포즈를 획득하고 current_fpose 변수에 저장하십시오.
-
4 단계: Mech-Viz 프로젝트 실행 명령어를 전송하십시오. 자세한 파라미터 설정은 201 명령어 참고하십시오.
-
5 단계: 201 명령어가 반환된 상태 코드를 획득하고 res 변수에 저장하십시오.
-
6 단계: Mech-Viz계획 경로 획득하는 명령어를 전송하십시오. 자세한 파라미터 설정은 205 명령어 참고하십시오.
-
7 단계: 205 명령어가 반환된 데이터를 획득하고 res 변수에 저장하십시오.
-
8 단계: 7 단계에서 수신한 데이터를 문자열 형식에서 배열 형식으로 변환하고 viz_recv 변수에 저장하십시오.
-
9 단계: viz_recv 시작 인덱스 1의 값이 2100인지 확인하십시오. 2100인 경우 Mech-Viz 계획 경로를 획득 성공입니다.
-
10 단계: 첫 번째 웨이포인트까지 직선 운동하십시오.
JAKA 직선 운동에는 TCP 포즈 값을 전달해야 하며, 관절 운동에는 관절 값을 전달해야 합니다.
Mech-Vision "경로 계획" 스텝을 사용하여 계획된 경로를 획득하기
프로그래밍 제어 화면에서 mmVisPath 프로그램을 열어주십시오.
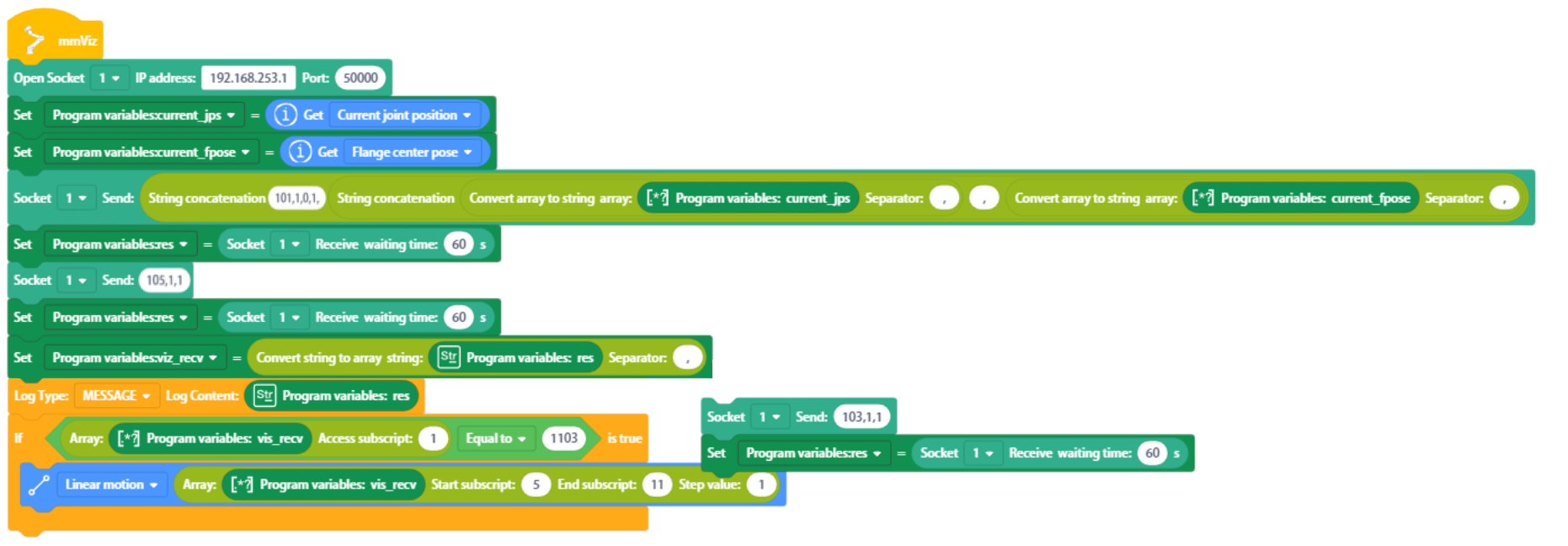
프로그램 설명
-
1 단계: 로봇과 IPC의 Socket 연결을 설정하십시오. 이 곳에 IP 주소는 IPC의 IP 주소이며 로봇IP와 동일한 네트워크 구간에 있어야 합니다.
-
2 단계: 로봇의 현재 관절 각도를 획득하고 current_jps 변수에 저장하십시오.
-
3 단계: 로봇의 현재 플랜지 포즈를 획득하고 current_fpose 변수에 저장하십시오.
-
4 단계: Mech-Vision 프로젝트 실행 명령어를 전송하십시오. 자세한 파라미터 설정은 101 명령어 참고하십시오.
-
5 단계: 101 명령어가 반환된 상태 코드를 획득하고 res 변수에 저장하십시오.
-
6 단계: Mech-Vision계획 경로 획득하는 명령어를 전송하십시오. 자세한 파라미터 설정은 105 명령어 참고하십시오.
-
7 단계: 105 명령어가 반환된 데이터를 획득하고 res 변수에 저장하십시오.
-
8 단계: 7 단계에서 수신한 데이터를 문자열 형식에서 배열 형식으로 변환하고 vis_recv 변수에 저장하십시오.
-
9 단계: 로그를 출력하십시오.
-
10 단계: vis_recv 시작 인덱스 1의 값이 1103인지 확인하십시오. 1103인 경우 Mech-Vision 계획 경로를 획득 성공입니다.
-
11 단계: 첫 번째 웨이포인트까지 직선 운동하십시오.
JAKA 직선 운동에는 TCP 포즈 값을 전달해야 하며, 관절 운동에는 관절 값을 전달해야 합니다.