SIASUN GCR 자동 캘리브레이션
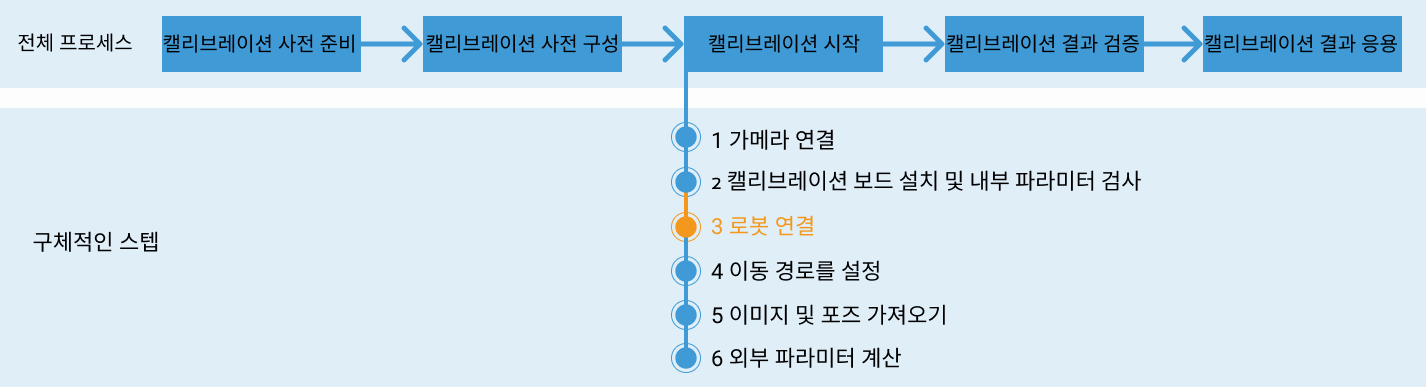
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고사항
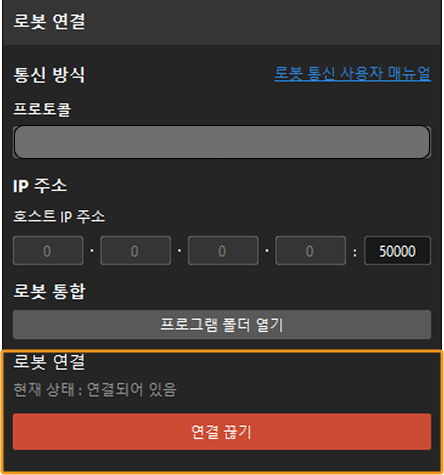
캘리브레이션을 실행할 때 "로봇을 연결하기" 스텝에서 Mech-Vision 소프트웨어 화면에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 스텝을 진행하십시오.
|
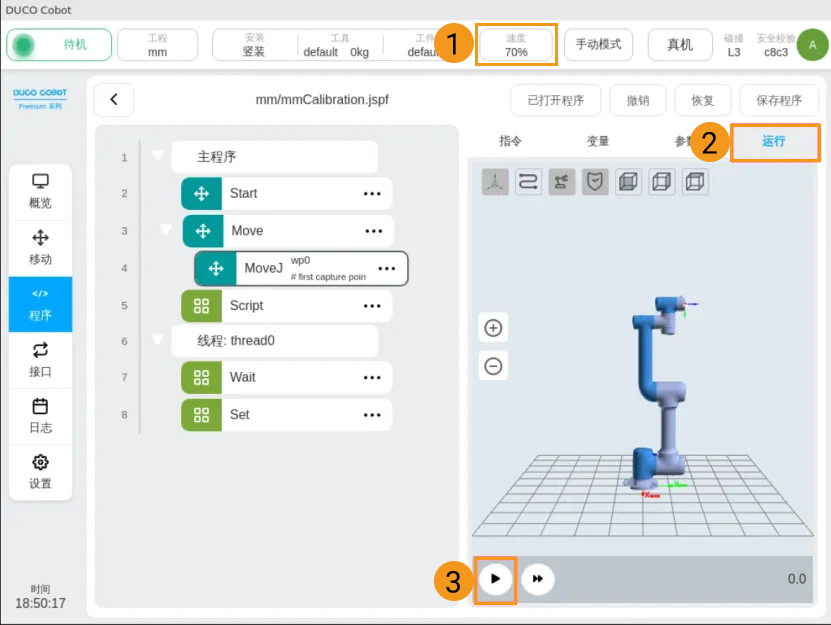
1. 캘리브레이션 프로그램 선택 및 수정
수동 모드에서 티치 펜던트 화면 오른쪽 패널의프로그램을 클릭한 다음에 mmCalibration.jspf파일을 선택하여 열어주십시오.
| g_ipcIp 변수 값은 IPC의 IP 주소이며, g_ipcPort 변수 값은 Mech-Vision 소프트웨어에서 설치된 호스트 포트 번호입니다. 자세한 설정 방법은 여기를 참조하십시오. |

2. 티치 펜던트를 통해 캘리브레이션 시작점 설정
-
아래 이미지와 같이 코드 블록을 선택한 후, 오른쪽의parameter탭에서 버튼을 차례로 클릭하십시오.

-
로봇을 수동으로 캘리브레이션 시작점 위치로 이동시킨 후 the record current joint positions button버튼을 클릭하면 현재 로봇의 관절 각도가 캘리브레이션 시작점으로 설정됩니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.