마스터 컨트롤 통신 구성 (협업 로봇)
이 부분에서 ROKAE Xmate7 협업 로봇을 마스터 컨트롤 방식으로 제어하는 방법을 설명합니다.
플래싱하기 전 준비
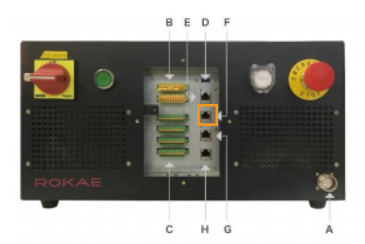
로봇에 파일을 플래싱하기
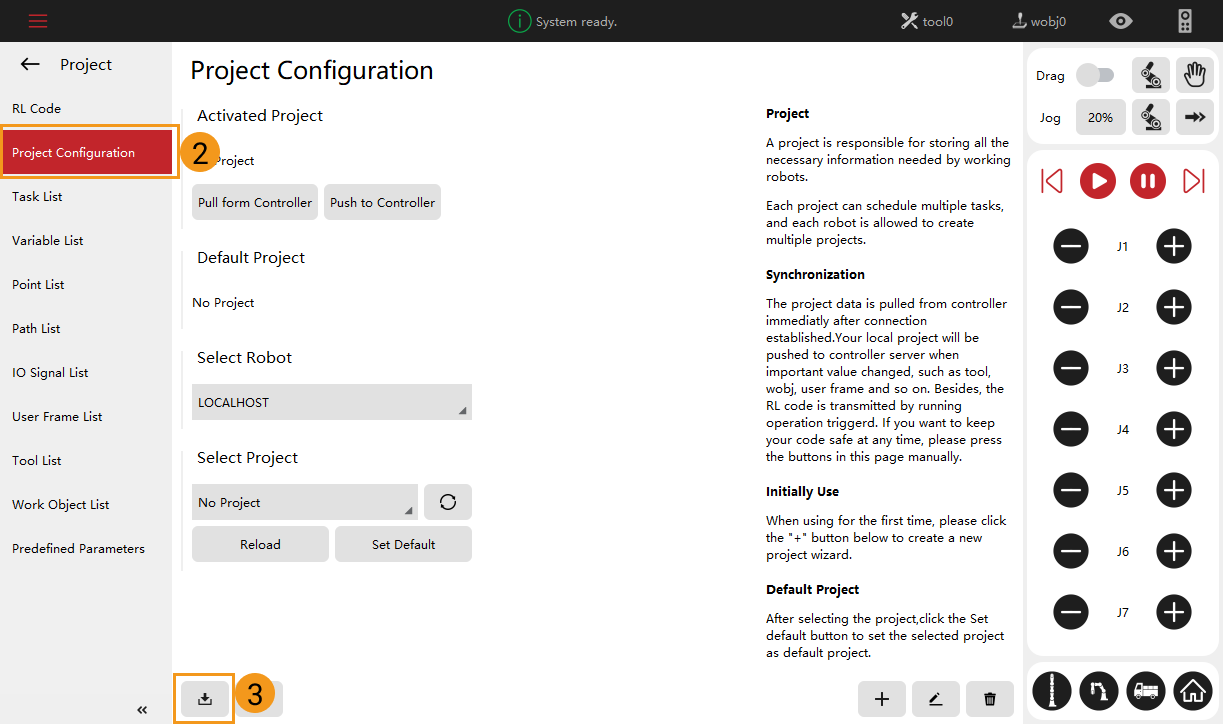
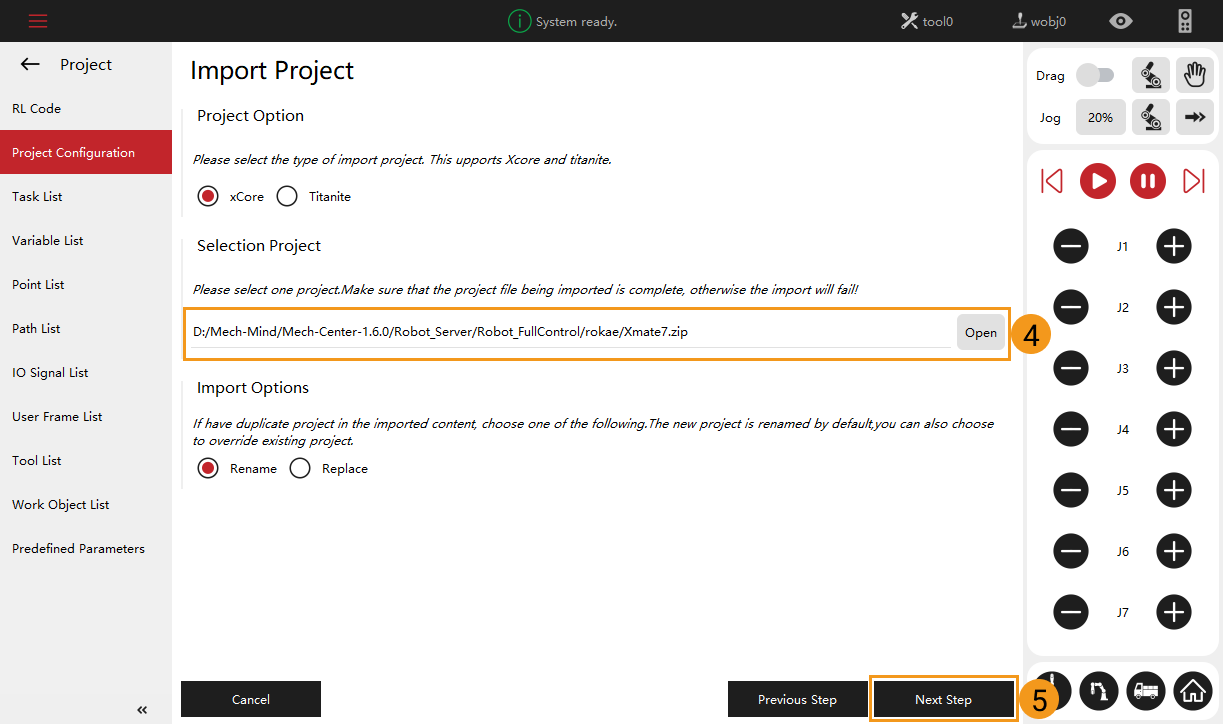
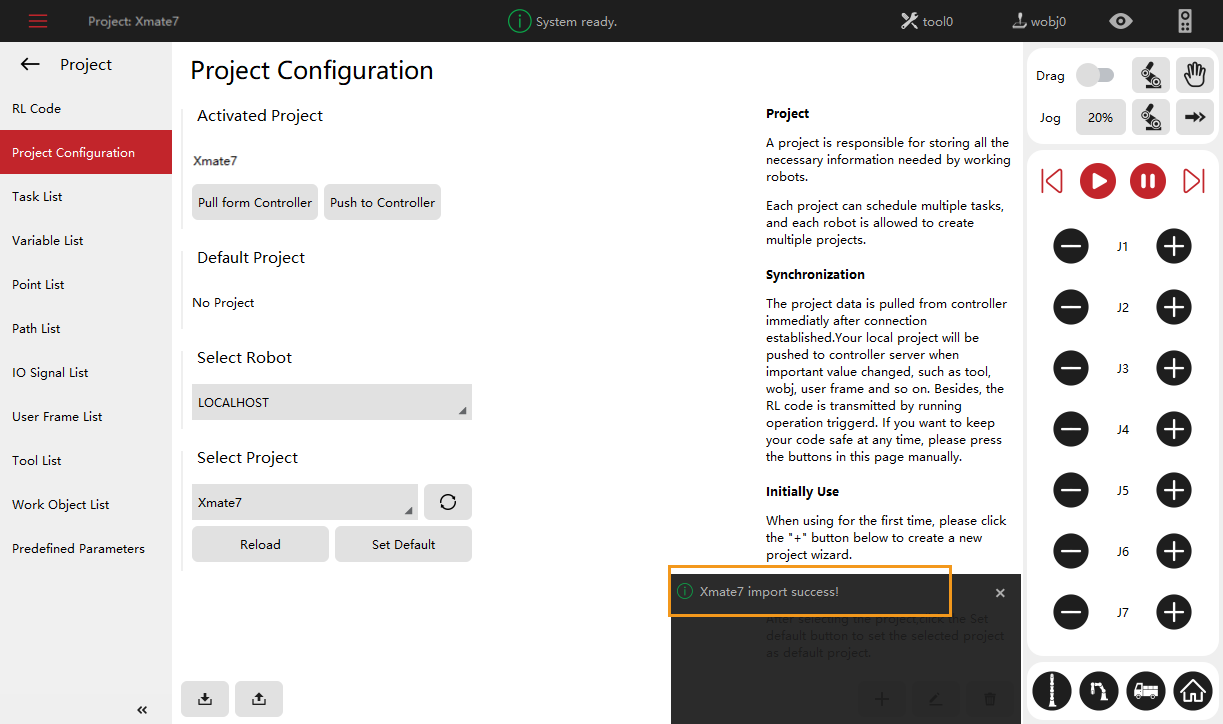
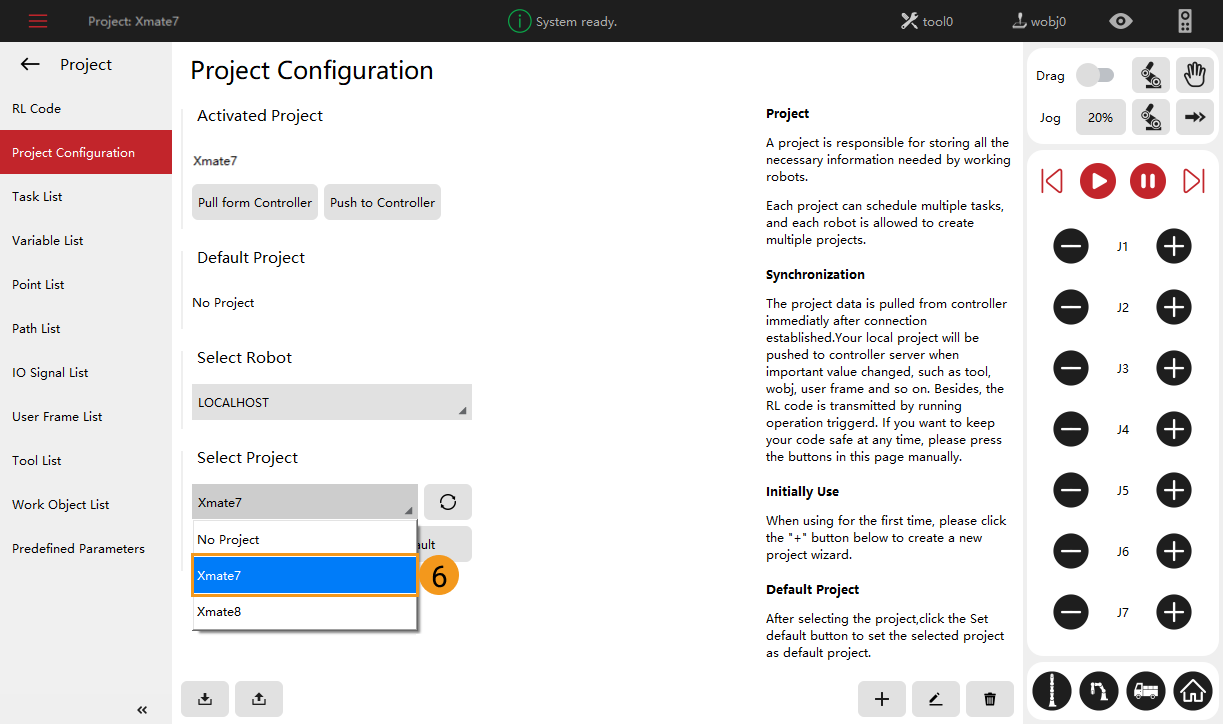
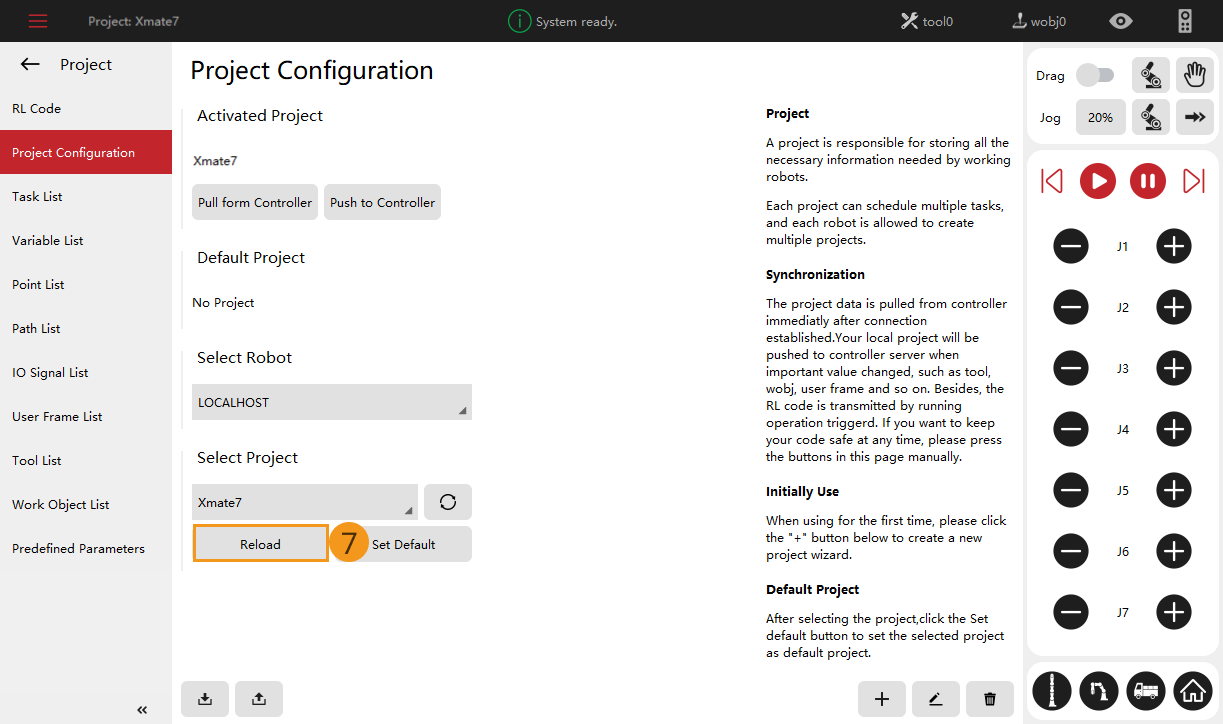
외부 통신 설정하기
-
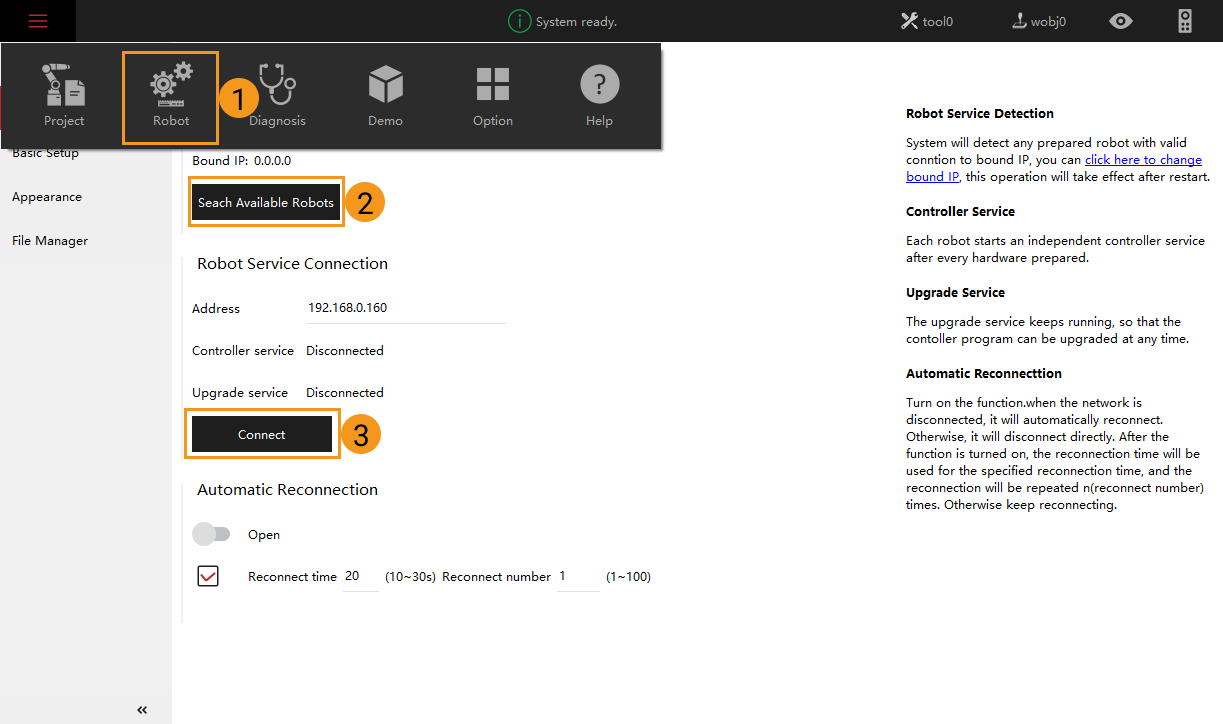
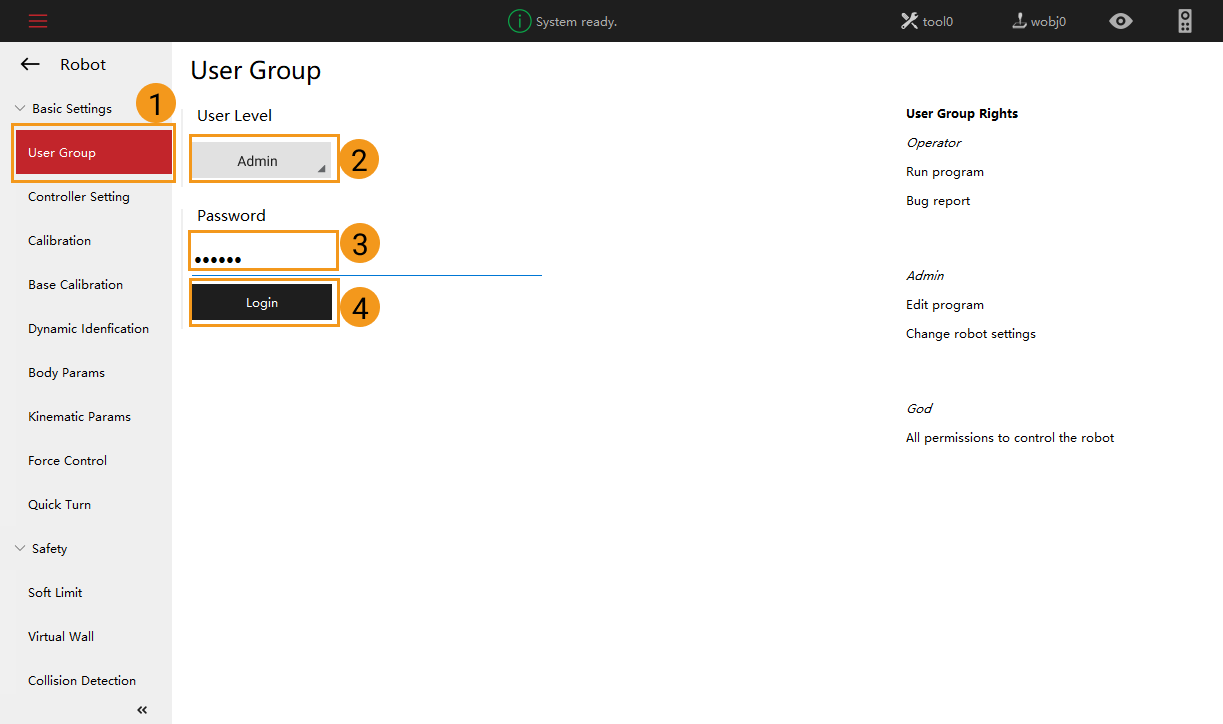
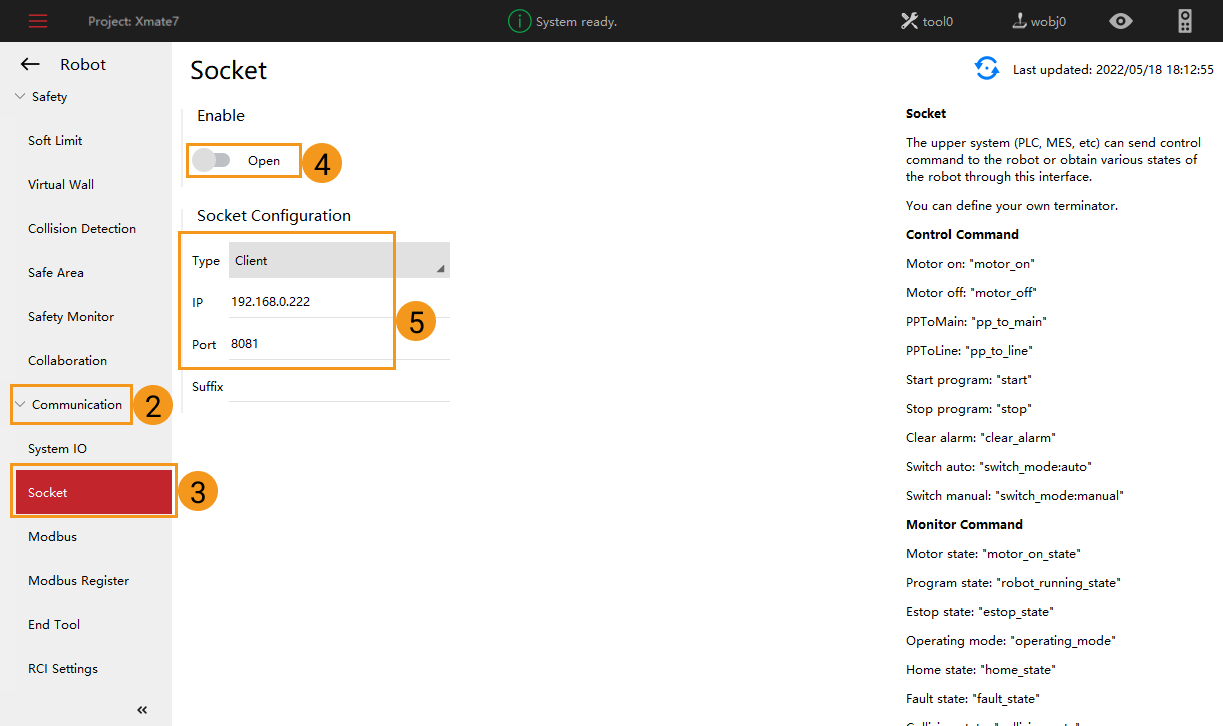
Robot버튼을 클릭합니다.

-
차례로 버튼을 클릭하여 외부 통신 설정 인터페이스로 들어갑니다. 아래 그림에 표시된 대로 Enable 켜고 socket 설정 완료합니다.
마스터 컨트롤 통신 테스트
-
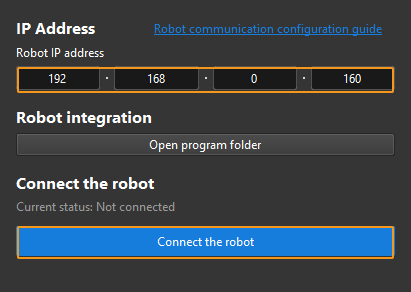
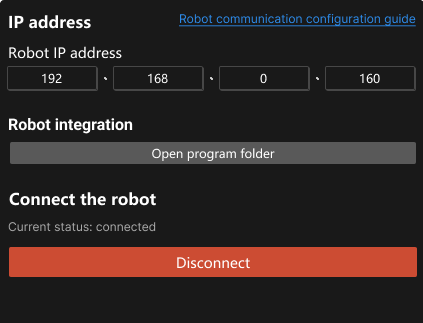
Mech-Viz 소프트웨어에서 툴 바에 있는 Connect the robot 을 클릭합니다.
Robot IP address 에서 192.168.0.160 을 입력하고 Connect the robot버튼을 클릭합니다.
이때, Mech-Viz는 마스터 컨트롤 프로그램이 실행된 후에 연결을 설정합니다. 여기서는 기본적으로 120초 동안 대기합니다.
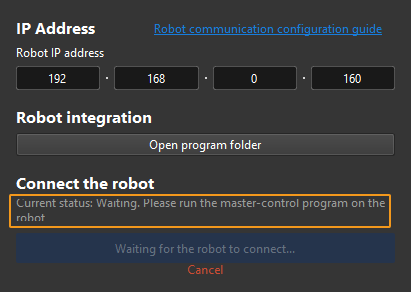
다음은 마스터 컨트롤 프로그램을 로딩하고 실행하는 작업입니다. 해당 작업은 120초 내에 완료되어야 하며, 그렇지 않으면Mech-Viz소프트웨어에서 Connect the robot 버튼을 다시 클릭해야 합니다.

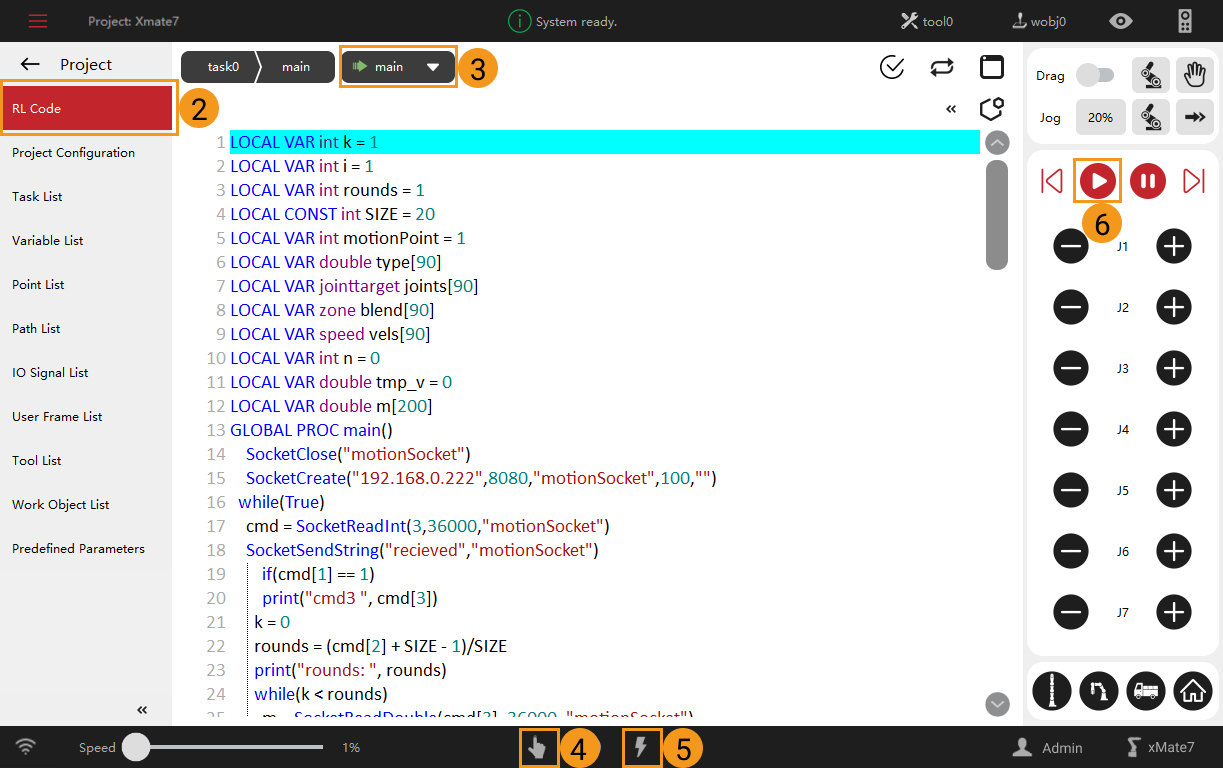
Mech-Viz소프트웨어에서 현재 상태는 "connected"으로 표시됩니다.
위 작업이 완료된 후 로봇을 이동하기를 참고하여 후속 작업을 완료하세요.